地铁列车360°外观故障图像检测系统的应用
2020-10-26陆其波梁桂琦古鹏冉春燕刘晓曼王顺
文/陆其波、梁桂琦、古鹏、冉春燕、刘晓曼王顺
1 前言
目前,地铁列车故障检测和预防大多采用人工巡检的方式,处于定期维修与故障维修的模式。列车结构复杂、部件多造成了人工巡检效率低下,检测结果依赖巡检员主观感受和个人经验,无法保证检修质量。随着开行线路密集、列车数量的不断增加,传统的地铁运营方式已经不能满足地铁行业发展的急迫需求。因此,将机器视觉、模式识别等技术运用到地铁列车故障检测中[1],并建立车辆健康状态履历,为设备故障预测分析提供一种新的检测模式,实现从“人检”向“机检”转变,降低运维成本,为采用图像检测的检修运维模式奠定基础[2]。该模式形成资源节约、效率提高的价值创造点,为列车运行提供安全保障,对轨道交通实际运营具有指导意义。
2 总体方案与技术方案
针对轨道交通领域的故障检测:首先完成精准样本数据采集;其次,在干扰环境下对部件特征提取,建立车底、两侧、车顶等部件精确数据模型;通过正负样本数据建立故障失效形式模型,并对数据模型进行识别;最后结合相关软硬件搭建整体系统平台。
通过对国内外现有的城轨列车关键部件图像识别系统相关理论及工程成果深入调查,以镇龙车辆段21号线为试点,广州地铁B型车为研究对象,进行列车关键部件故障检测研究。根据项目的实际需要和目标,进行整体系统架构设计、图像采集方案设计、图像预处理、故障形式建模、关键部件的参数化数学模型建立、电子履历的生成及模型构建等,最后完成部件图像识别关键技术研究,并服务于实际现场。
根据总体方案分解项目关键技术如下:
2.1 列车关键部件图像采集
获取高质量列车外观图像,结合列车运行各种实际工况,采集系统应适应动态变化的车速,适应白天、夜晚等多种外部环境。
2.2 列车部件特征提取
针对采集系统无法解决干扰问题,如泥污、水渍等,建立针对性的特征提取算法模型,减少干扰对特征提取准确性的影响。
2.3 建立图像数据模型
提取集电靴、制动单元、转向架等特征数据,针对车型、部件位置等不同信息参数,建立图像模型。
2.4 建立失效部件特征模型及数据集
部件特征模型建立后,根据任务需求划分六大类失效模型。分别为状态类、断裂类、测量类、缺失类、松动类、污渍异物类,并进行异常检测算法的定制化开发,形成故障部件数据集。
2.5 智能检测及软件的应用
基于数据采集系统、数据预处理、特征提取、模式识别等,搭建整体硬件及软件系统应用平台,实现列车车底、两侧、车顶等关键部件检测。基于B/S架构实现应用程序,生成故障检修单,形成的完整检修作业流程。
3 系统功能架构
地铁列车360°外观故障图像检测系统基于对检修修程、检测项点梳理和算法可行性分析,覆盖四日检修程83%,覆盖检修部件项点8600余项(101类),占总检修部件项点78%。其中,影响行车安全的关键项点就2000余项(26类),达到全部覆盖的水平。
地铁列车360°外观故障图像检测系统按照功能主要分为图像采集子系统、图像分析子系统、业务信息子系统。三个子系统之间通过光纤、UDP等完成状态传递和数据传输。
3.1 图像采集子系统
为获取车底、两侧、车顶等大幅图像,系统采用多个线扫描相机进行数据采集。相比于面阵相机,线扫描相机具有高分辨率、图像边缘畸变小、动态视觉范围大、扫描速度与信号转换速度快、抗干扰、稳定性高的明显优势。图像采集系统位于检测现场,实现列车车底、两侧、车顶图像采集功能。该子系统包含触发开关、图像采集模组、轨边控制单元以及辅助系统实现车号检测功能的车号识别系统等,工作区域配置情况如表1。
3.2 图像分析子系统
将采集原始图像进行相关处理,通过图像分析子系统对可视关键部件进行故障数据分析对比和故障判断,实现车体关键部件的图像自动识别和故障及时上报。图像配准完成后,对列车车底、两侧、车顶等部件进行故障检测,从图像预处理到关键部件特征提取再到模式识别三个阶段,采用图像分割、边缘提取、Hough变换、图像匹配等。对于线扫描相机的采集频率,需要与车速实时绑定。由于测速雷达在工作环境中,会出现延时情况,并且列车通过测速区域时行驶速度会上下波动。因此,相机采集频率在匹配列车速度上存在误差,造成采集图像的拉伸、压缩等畸变问题,影响目标定位精度和故障识别准确度。
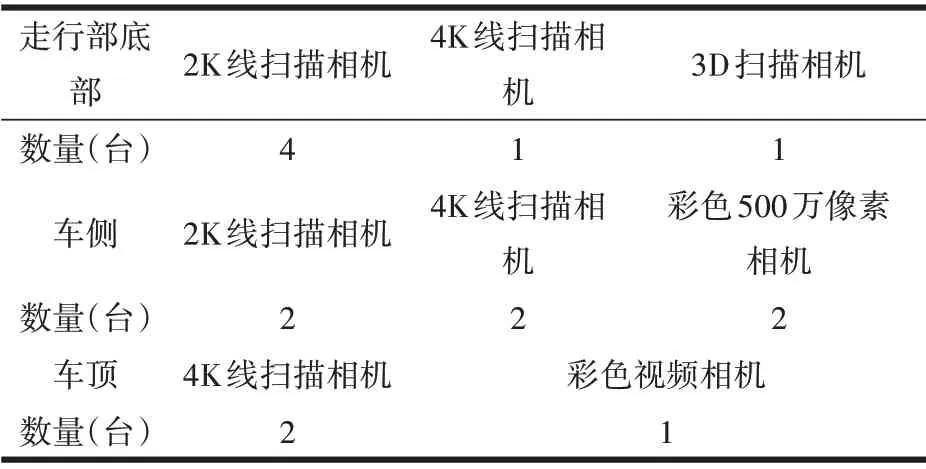
表1 相机工作区域配置
3.3 业务信息子系统
业务信息子系统主要由远程控制中心服务器、显示终端、交换机和光端机组成。远程控制中心服务器用于支撑业务信息子系统。显示终端显示故障提示、过车记录、工单日志等信息,主要完成图像信息的显示、故障信息的收集以及工作信息的记录。业务系统设置多权限、多用户功能操作流程设计,结合传统检修业务组织形式,将传统检修业务干系人,如检修员、班长、调度员、技术员等职能融入业务终端操作系统中,结合检修作业信息化,延续传统检修的纸质化检修报告复合模式。对于整个业务流程,可通过PC端确认部件是否发生故障。对于有疑问的部件,检修员通过手持终端在现场快速校核,然后将检测结果推送到智能运维系统或检修管理系统,统一地接收故障报告单,对领取物料进行分发,实现检修一体化。
4 广州地铁21号线B8车型故障检测试验
检测项点来源于对修程的梳理,通过现场车辆各部件清点,一共梳理出11232项。通过简易的采集设备获取列车高清成像示意图,在图中梳理出8640项项点能够响应,约占总检修部件项点78%,从业务发生度、严重度和图像识别的适用性等多方角度,筛选出具有代表性的重点项点90类进行试验。系统准确率验证方法,采集数据10000次,减去误报次数或误差范围外的次数,这个数作为分子,数据采集总次数作为分母,该数据即为故障准确率。
系统的故障检测立项关键指标如表:
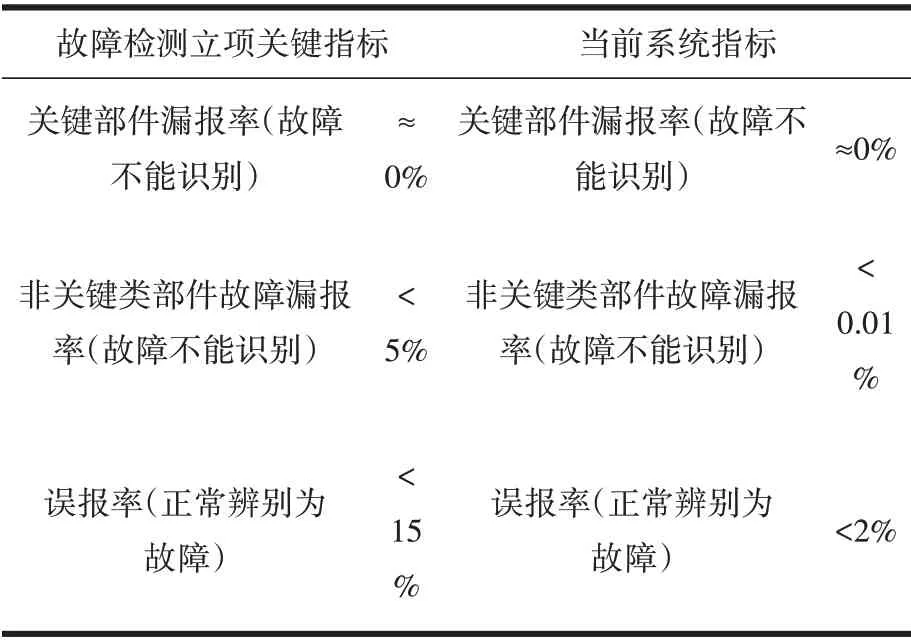
表2 立项指标与实际结果对比
2019年9月系统试运行后,截至2020年5月30日检测数据为:共计检测列车1758次,项点1538243个,检测出模拟故障336个,检测出真实故障56例,无漏报,误报项点19373个,系统统计的检测准确率98.87%。
基于广州地铁21号线既有作业流程,尝试结合检修生产投入试用至今,检测部件占人工四日检项点83%(关键项点全覆盖),由传统25分钟2人的无电作业,优化为1人PC端检测(5分钟)和1人现场复核剩下未检测项点(25分钟),检视工作量降低40%,总流程时间优化33.3%,系统为八日检提供支撑。
5 展望
实现地铁列车关键部件故障检测能降低人工成本,提高故障检测效率。相比于传统人检模式,采用图像检测系统在检测精度大幅提高,在列车重大事故的安全防护上发挥着重要作用。但在故障识别过程中,依然存在局限性,没有利用好大量样本的优势。虽然在轨道交通领域中故障样本的数量少,但现如今已经存在一些针对正负样本不均衡的深度学习算法。深度学习在图像领域中的目标检测、实例分割等方面已有成功应用,未来可以将适用于轨道交通行业的深度学习算法使用到列车关键部件故障检测当中。随着计算机计算能力的提高,针对整列车所有关键部件全覆盖的深度学习检测方式也会实现。当然,考虑到列车检测环境的复杂性和不确定性,提高深度学习在不同正线上的泛化能力将是未来需要深入研究方向。
