基于RTK-GPS技术船闸闸室段水下泥沙淤积测绘研究*
2020-10-25范向前张卫云
喻 江,明 攀,陆 俊,范向前,张卫云
(1.水利部水科学与水工程重点实验室,江苏 南京 210024;2.南京水利科学研究院,江苏 南京 210024;3.南京市水利规划设计院股份有限公司,江苏 南京 210022)
船闸工程作为水运业通航的关键环节,起着至关重要的作用,船闸工程泥沙淤积问题则严重制约着水运通航水平的发展与提升,如何施策精确获取船闸闸室段水下泥沙淤积的分布形态、淤积量等情况成为水下工程测量的一大难题,为当前船闸工程安全评价和除险加固的一大绊脚石。
传统的水下淤积测量技术主要包括以下几个方面[1-2]:(1)SAR图像内波检测与参数估计方法;(2)经纬仪测量记录法;(3)声波测距极坐标定位法;(4)断面与地形法;(5)基于等深线的计算方法。该方法局限性大、成本高、速度慢、精度低,为了提高测量精度,有必要将以上几种方法一并分析,完善各自测量的不足之处。鉴于传统水下淤积测量方法的各种弊端,近年来已逐渐开发出更高效率、更高精度的测量分析技术,期间,无人测量船技术被投入水下测量工作。该技术主要包括GPS定位技术、实时通信技术、智能导航技术、自动避障技术等,可对行程区域的位置、水质、水深等参数进行快速采集,非常适合内陆江、河、湖泊流域测绘[3-4]。
某航道船闸工程布置在枢纽左侧的河道上,左侧为重力式挡水坝段,右侧为重力式溢流坝段。主要由上闸首、下闸首、闸室及上、下游引航道组成,上、下游全长336.0m。闸室段分为8个结构段,全长97.00m,为整体坞式结构,闸室底宽26.00m,口门宽12.00m,左右闸墙顶部宽均为3.00m,闸墙顶部高程127.00m,闸室底板顶高程为111.20m,两侧闸墙内布置输水廊道及其出流支管,当前水位为115.70m。其竣工验收以来多年未投入正常运营使用,存在结构老化、闸室段淤积等问题,急需清淤等技改升级。因此,文章基于无人测量船RTK-GPS技术[5]对该船闸闸室段水下泥沙淤积情况进行相应测量与统计研究。
1 RTK-GPS技术船闸航道泥沙淤积测量
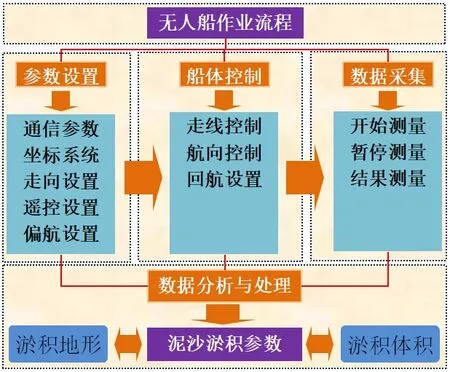
图1 无人船量测作业流程

图2 无人船回声测深仪基本原理
(1)基本原理。无人船作业流程如图1,RTK-GPS技术测深仪的回声测距原理如图2所示。由换能器向水中垂直发射短脉冲声波,声波遇到水底发生反射、透射、散射和折射,反射的回波被换能器接收,通过换能器发散和反射回波的时间间隔与波在水中的传播速度推算水面的高程,进一步根据定位技术形成三维坐标。其中,Z为换能器到水底的距离,声速在水中的传播速度为v,传播时间为t,则水深Z=vt/2,最后的测量结果就等于水深Z加上吃水(吃水是水面到换能器底面的距离),结合坐标系统可得整个测量区域的水深地形图,换算可得水下泥沙淤积形态分布。
(2)测线布置。测线顺着船闸闸室段均匀布置,每隔1.0m间距布置一条测线,每条测线长97m,共11条测线,工作频率采用高频200kHz进行,测深范围:0.3~600m,测深精度:±10mm+0.1% H,分辨率:1cm;吃水范围:0.1m,具体布置如图3所示。
(3)测量结果与分析。根据测线布置方案,设置测量软件的投影和坐标参数,无人船入水,通过遥控操作无人船,每条测线每隔2m进行一次水深和坐标数据采集。Y=0m、Y=6m、Y=12m测线泥沙淤积情况如图4~图6所示,根据13条测线汇总分析可得船闸闸室段泥沙淤积等高线测绘分布情况如图7所示。
由图4~图7进行统计分析,得到无人船测量的该船闸闸室段泥沙淤积测量结果汇总如表1所示。

图3 船闸闸室段无人船测量测线布置图

图4 Y=0m测线泥沙淤积代表图
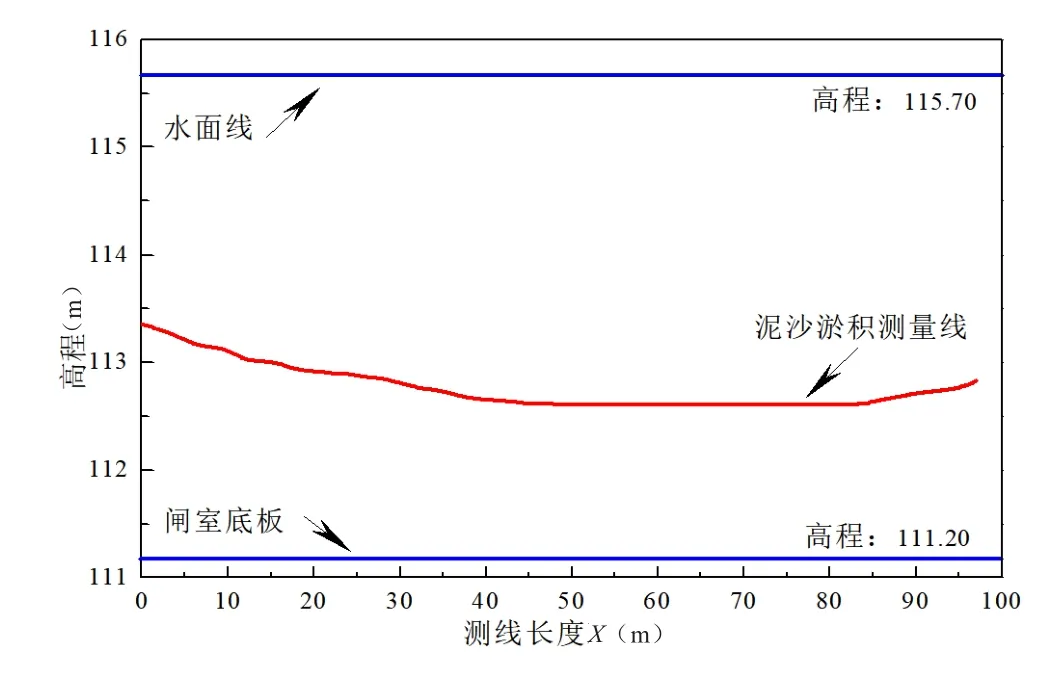
图5 Y=6m测线泥沙淤积代表图

图6 Y=12m测线泥沙淤积代表图

图7 船闸闸室段泥沙淤积等高线分布图

表1 泥沙淤积测量结果统计汇总表
由表1可知,通过RTK-GPS技术测量手段测量与统计分析得到该船闸闸室段泥沙淤积总量为1946.91m3。
2 结论
文章采用无人测量船RTK-GPS技术对闽江航道某船闸闸室段进行了水下泥沙淤积测量,结果表明该技术定位精度高,工作效率显著,最终为该船闸工程技改升级及安全评价提供了科技支撑[6]。
