智能网联汽车无法行驶故障的诊断与分析
2020-10-24广东王光林
◆文/广东 王光林
随着时代的进步,人们的生活将逐步进入万物互联时代,伴随人工智能、物联网、大数据、信息通信等技术及产业化的快速发展,国家发改委在2018年初公布《智能汽车创新发展战略》(征求意见稿),明确2020年中低级别智能汽车达到规模化生产,中高级别智能汽车实现市场化应用。2017年大专职业院校开设《汽车智能技术专业》,2018年中职与技工院校开设《智能网联汽车应用技术专业》,2019年人力资源和社会保障部、中国机械联合会联合主办全国新能源汽车关键技术技能大赛(新能源汽车智能化技术是赛项之一),旨在辐射、引领新兴产业人才培养。本文将扼要阐述2019年中国技能大赛全国新能源汽车关键技术技能大赛,新能源汽车智能化技术赛项所涉及的智能网联汽车的结构、工作原理及无法行驶的故障诊断与分析,为已开设智能网联汽车应用技术专业的职业院校提供教学参考。
一、故障现象
智能网联汽车装配好之后,接合电源总开关,启动自动驾驶功能,智能网联汽车无法行驶。
二、智能网联汽车结构与工作原理
在诊断与分析智能网联汽车无法行驶的故障之前,先阐述智能网联汽车的结构与工作原理,为分析故障产生的原因、故障诊断方法与过程提供充分的理论依据。
1.智能网联汽车的结构
智能网联汽车(图1)主要由线控底盘和上装台架两大部分组成(图2)。
智能网联汽车线控底盘包括线控驱动/转向/制动控制系统、电气系统、CAN网络通讯系统、三电核心部件(电池、电机、电控ECU)、对外供电(3组12V输出DC/DC稳压器)和急停装置(软急停与硬急停等零部件),如图3所示。
上装台架部分由感知系统、决策系统、执行系统和操作平台构成。感知系统包括:激光雷达、毫米波雷达、摄像头、GPS/惯导(组合导航系统)。决策系统包括:自动驾驶处理器(AGX处理器)、交换机、CAN卡、4G路由器、HUB拓展坞等(图4)。其中执行系统包括线控转向、驱动、制动等,设备安装在线控底盘上。

图1 智能网联汽车台架图

图2 线控底盘和上装台架
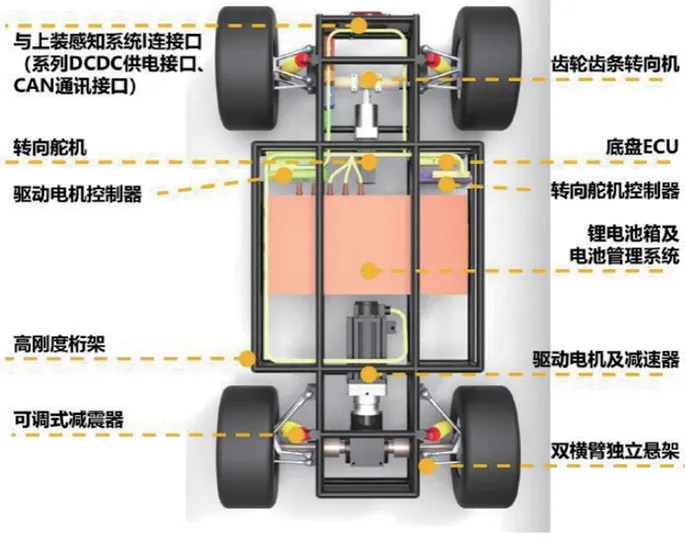
图3 线控底盘配置图

图4 上装部分配置图
在自动驾驶系统中,GPS/惯导(含组合导航处理器、4G天线、GNSS天线)是利用惯导系统结合差分GPS定位系统,实现厘米级定位和航向解算的 ,为车辆提供位置和航向信息。该系统是自动驾驶功能最基本的传感器。自动驾驶的主要工作是按照事先规划的路线,根据组合导航系统反馈的位置信息循线行驶。毫米波雷达可以探测车辆前方障碍物,激光雷达可以探测车辆四周障碍物,二者信息结合后车辆可实现对于行驶路线上障碍物的感知,从而进行停车或者变道绕行等决策。工控机(控制板或控制器)主要完成高层协议与车底盘控制协议之间的互相转换,以及控制报警灯在出现故障时发出提示,同时受远程急停。远程急停遥控器急停实施后控制器将控制底盘迅速刹停,不再响应高层协议消息,远程急停遥控器急停解除后,车辆可以继续受高层协议控制。AGX(自动驾驶处理器)是接收激光雷达和毫米波雷达的数据,同时也可以接受连接到路由器热点的其他终端的远程桌面控制请求,组合导航定位模块通过普通USB接口连接到AGX,起到数据储存及处理的作用。4G路由器支持网线和4G网卡,实现车载供网。HUB拓展坞通过接口和插槽,可以连接多种外部设备。交换机是提供网络通讯的网关。摄像头借助图像校正和拼接技术,提供车辆四周的全景视图,辅助车辆驾驶。
2.智能网联汽车的工作原理
智能网联汽车是指搭载先进的车载传感器、控制器和执行器等装置,并融合现代通信与网络技术,使车辆具备复杂环境感知、智能化决策与控制功能,能综合实现安全、节能、环保及舒适行驶的新一代智能汽车,整车设备连接逻辑如图5所示。

图5 整车设备连接逻辑图
组合导航系统GNSS天线接收GPS定位与定向信号,结合AGX处理器设定的行走路线,实现智能网联汽车AGX处理器传输信号给线控底盘控制板,控制行驶系统、转向系统等自动行驶。在自动行驶过程中,AGX处理器接收激光雷达信号、摄像头信号等识别行驶路线中的障碍物、行人等,然后传输给线控底盘控制板实现制动、避让并报警。毫米波雷达成像信号传送给线控底盘控制板,控制车辆遇到障碍物或行人时实现制动并报警等。
三、故障诊断分析
结合线路图及工作原理,分析智能网联汽车无法自动行驶的故障原因有:
①电源故障,部件未得到供电,导致无法行驶;
②毫米波雷达故障,导致车辆无法自动行驶,启动自动行驶后报警灯亮起;
③激光雷达故障,导致车辆无法自动行驶,启动自动行驶后报警灯亮起;
④组合导航系统故障,导致车辆无法自动行驶。
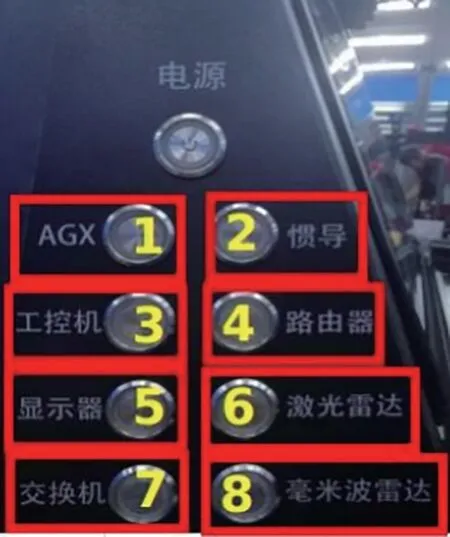
图7 部件电源指示灯
1.电源故障
打开遥控器开关,左侧正面控制模式切换开关拨到“0”档位,右侧侧面开关拨向背面档位解除急停,进入自动驾驶模式。打开电源总开关及8只传感器开关,如果灯变绿色(图6、图7),即为电源正常。否则需要根据电源电路图(图8)测量部件电源线路正负极电压是否为12V,测量电路前要不带电,要断开电源线路。

图8 电源线路
2.毫米波雷达故障
启动自动驾驶软件,主页面实时状态显示毫米波雷达数据错误,车辆无法自动驾驶,启动自动驾驶后报警灯亮起(图9)。

图9 毫米波雷达故障显示
为此,需要检查毫米波雷达本身是否损坏(包括外观、针脚、安装方向)等,检查毫米波雷达线束,包括两根电源分支线是否断路、短路;两根CAN线是否断路、短接、电阻异常等。测量电源线路电压为DC12V,两条CAN线电阻为60Ω,即断开DB26端毫米波雷达CAN线插头,实际测量两条CAN线电阻为0,表明短路,造成无法自动行驶,排除故障后,测量两条CAN线电阻为60Ω,正常自动行驶(参考图10整车信号线路)。

图10 整车信号线路
3.激光雷达故障
启动自动驾驶软件,主页面实时状态显示激光雷达数据错误,车辆无法自动驾驶,启动自动驾驶后报警灯亮起(图9)。
为此,需要检查激光雷达转换器与激光雷达本身是否损坏(包括外观、安装方向)等,检查激光雷达转换器线束,包括两根电源分支线是否断路、短路,激光雷达至激光雷达转换器、激光雷达转换器至AGX(处理器)线束是否正常等。观察激光雷达转换器电源灯(红色)是否亮起,如果亮起即为正常(图11)。打开AGX后,运行自动驾驶程序,观察激光传感器电动机应该转动扫描,切换至RUN页面,观察十字星交点附近是否有点云出现(图12),点云数据形成的轮廓与车辆周边真实环境相符,用手在激光雷达正前方遮挡,点云数据形成的轮廓正前方有显示,即为数据及安装方向正常;否则更换电源线、激光雷达、调整激光雷达安装方向。

图12 激光雷达运行界面
4.组合导航系统故障
启动自动驾驶软件,车辆无法自动驾驶,启动自动驾驶后报警灯亮起。观察惯导4个灯的状态,最后2个灯常亮代表组合惯导和位置解码已正常工作,如橙色灯闪烁表示位置解算尚未完成。保持车辆静止,等待橙色灯常亮,表示位置解算完成;绿灯闪烁表示组合导航初始化尚未完成,可以手动操作车辆移动一段距离,最好在卫星信号良好的地段行驶一段距离后,绿灯常亮表示组合导航工作正常。第一个灯为红色常亮的电源灯,第二个灯为蓝色卫星灯,每隔5s闪烁1次表示正在搜星,如没搜到星,最好在卫星信号良好的地段行驶一段距离,搜到卫星之后每隔 5s闪烁N次,表示搜到N颗卫星(图13)。如不正常,需检查信号线或更换贯导系统。

图13 组合导航处理器
四、总结
在诊断车辆故障时,应对车辆及其零部件的结构及工作原理充分理解,才能有逻辑地分析问题,使用正确的方法诊断与排除智能网联汽车的故障。
