2014款凯迪拉克XTS故障灯偶尔点亮
2020-10-24北京郭林峰
◆文/北京 郭林峰
故障现象
一辆2014款凯迪拉克XTS,搭载2.0T LTG型发动机,行驶里程为95 700km。车主反映,该车在行驶中仪表台上发动机故障灯亮,而且车速在160km/h时松油门,车速降到150km/h时自动降挡,发动机转速会上升到3 000r/min。另外,故障发生后,车辆起步时也会闯车。这种故障是间歇性的,且频次不高,来店时已无故障现象。
故障诊断与排除
连接专用诊断仪GDS进行检测,发现有很多与网络通讯相关的故障码(图1),如:P0507-巡航控制开关信号信息计数器不正确、U0073-CAN总线通信断开、U0121-与电子制动控制模块失去通信等,基本都是与高速网络通讯相关的故障码。
从上述这些故障码中不难看出,故障码U0073属于关键信息。查阅该故障码的详细说明:
1.设备中止所有信息传输;
2.对从串行数据电路上接收到的所有参数,设备将使用它们的默认值;
3.在变速器控制模块中,U0073将导致变速器进入默认挡位;
4.在发动机控制模块和变速器控制模块中,U0073将使故障指示灯 (MIL) 点亮;
上述故障码含义描述与车主反映的一系列故障现象都非常吻合,由此基本可以判断,该车故障是由高速网络通讯故障所引起的。
由于该车故障为间歇性,所以我们用GM的数据总线诊断工具(Data Bus Diagnostic Tool)来检测高速网络6、14号脚的通讯情况。幸运的是,检测时我们刚好发现了这个间歇性故障(图2)。
用数据总线诊断工具查看高速网络6、14号针脚的电压波形(图3),发现14号针脚的波形明显不对称。正常情况下,高速网络6、14号针脚的电压波形如图4所示。
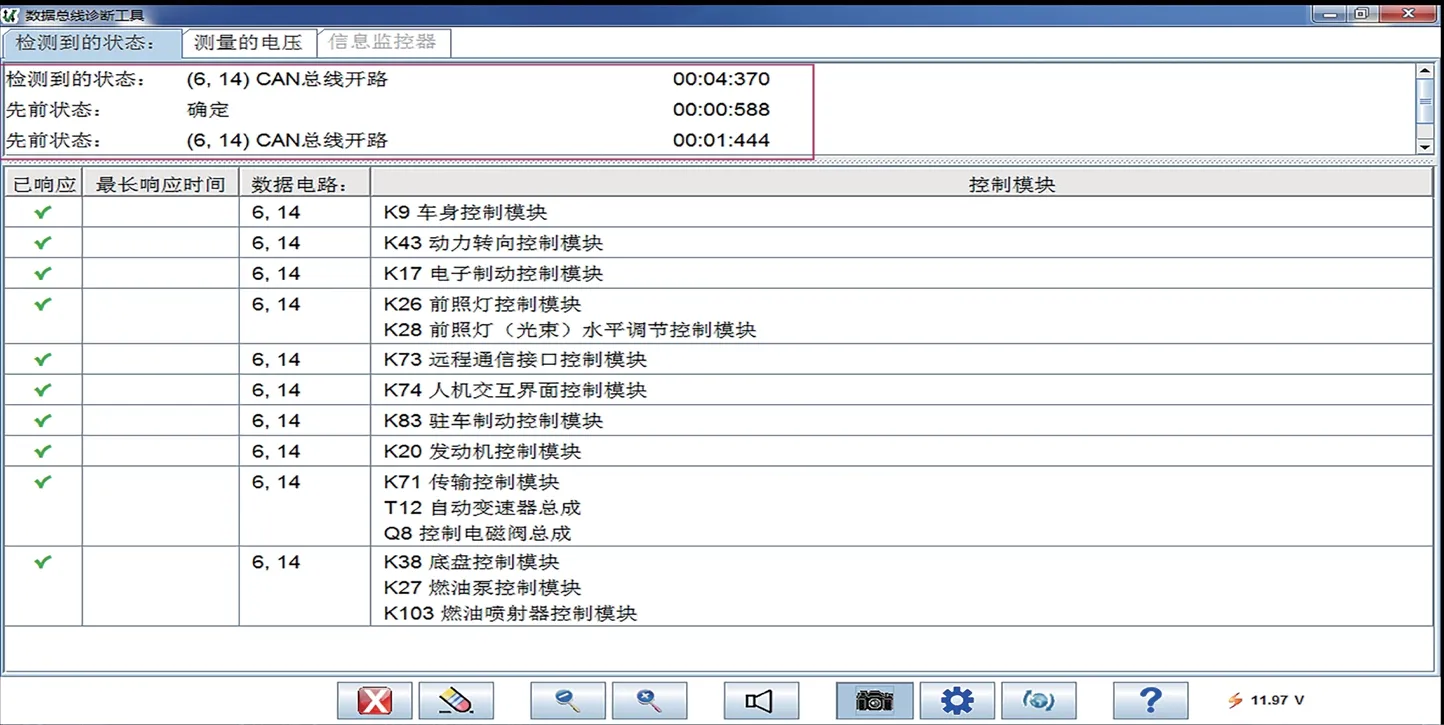
图2 用GM数据总线诊断工具检测故障车高速网络
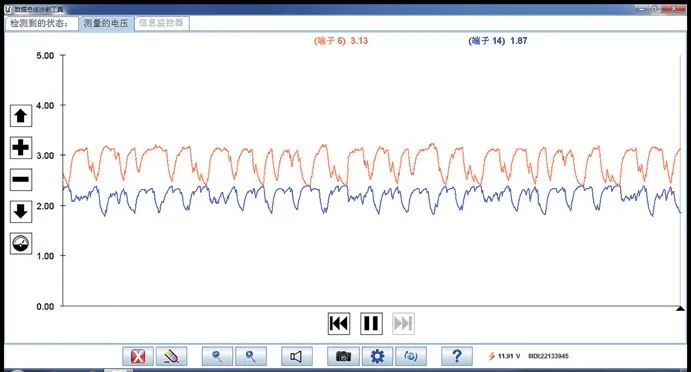
图3 故障车高速网络6、14号针脚的电压波形异常

图4 故障车型高速网络6、14号针脚的正常电压波形
高速GMLAN网络是通用汽车命名的一种网络类型,采用双绞线结构,传输速率为500kbit/s,双绞线分别连接至16针诊断插头(DLC)的6号脚和14号脚,120Ω的终端电阻位于两个不同的模块中,成并联关系。数据符号(1和0)以500kbit/s的速率按顺序传输。
总线上传输的数据可通过GMLAN高速信号电压和GMLAN低速信号电压之间的电压差来表示。当双线总线静止时,GMLAN高速和GMLAN低速信号电路无法被驱动,这代表逻辑“1”。此状态下,两个信号电路的电压同为2.5V,电压差为0。当传输逻辑“0”时,GMLAN高速信号电路被拉高至大约3.5V,而GMLAN低速电路被拉低至大约1.5V,电压差为2.0±0.5V。
在关闭点火开关的情况下,测量诊断插头6号脚和14号脚之间电阻为70.7Ω,正常情况下应为60Ω,明显存在异常。
查看高速网络电路(图5)并对其进行分析后,我们决定先将ECM断开,然后再次测量诊断插头6号脚和14号脚之间的电阻为120Ω,属于正常。
综合上述检测可以初步判断,故障点应该在ECM这侧的网络上(图5所示红色框内)。

图5 故障车型高速网络电路图

图6 故障车型发动机控制模块高速网络端子
发动机控制模块高速网络端子如图6所示,其中39号端子为高速GMLAN串行数据(+),40号端子为高速GMLAN串行数据(-)。测量ECM X1-39和DLC-6之间的电阻为0.8Ω,正常;测量ECM X1-40和DLC-14之间的电阻为68Ω,异常。断开X115的线束连接器,测量X115-13和DLC-14之间的电阻为68Ω,异常;断开电子制动控制模块(EBCM)插头,测量EBCM-10和X115-13之间的电阻为0.2Ω,正常;测量EBCM-9和DLC-14之间的电阻为0.8Ω,正常(图7)。
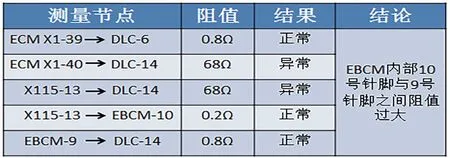
图7 各端子间电阻实测值
检查EBCM插头,各针脚、各端子无异常,线路和针脚端子的连接正常,没有退针现象,故障点应该为EBCM内部9-10针脚之间电阻过大。将EBCM插针涂抹导电胶后,再次插回原位,重新测量X115-13和DLC-14之间的电阻为1Ω,正常。再次连接数据总线诊断工具,用手掰动EBCM插头(不接触线束),故障又可以出现,因为插头已经锁紧,刻意让模块受力时故障就会再现,因此可以判定该车故障原因为电子制动控制模块EBCM内部存在虚接,电阻过大而引发故障。更换电子制动控制模块EBCM后,该车故障被彻底排除。
维修小结
本案例涉及的故障属于间歇性的,为此我们使用GM数据总线诊断工具来捕捉故障间歇性存在的时机,这对我们顺利排除故障帮助非常大。通过检测高速网络的电阻值偏差,逐一排除,直到最终锁定电子制动控制模块EBCM内部故障。
另外,及时检测电阻值时未能查出异常情况,仅凭数据总线诊断工具中电压波形的变化也可以逐步排查。由此可见,正确选择并熟练使用诊断工具,往往能事半功倍!
专家点评
焦建刚

该案例属于我们以前经常提到的网络通信系统故障,对于这类故障的诊断难点首先在于要对相关车型网络系统结构原理有充分的了解,其次是要掌握网络通信系统的故障排除方法。目前来看,很多技术人员在这两方面都有欠缺。单从电路图中找出相关网络的拓扑结构就已经存在不小的难度,再将相关电路在实际车辆上找出来,就感觉更加困难。这也是很多技术人员感到头疼的主要原因。即使找到了相关的电路图,对于通信系统的故障诊断,很多人又不得不面对另一个难题:如何入手查找故障?
针对本案例,首先要将通信系统的基本结构提取出来,并画出系统简图(图8),这样,我们对该车型的网络基本结构就清楚了。在车身控制单元的两侧,一侧是带有终端电阻的K83(驻车制动控制模块),另外一侧分别是K9、K17、K43、K71、K20,终端电阻在K20发动机模块中。

图8 网络通信系统结构简图
接下来,按照图9所示的诊断思路对通信系统进行故障诊断分析。
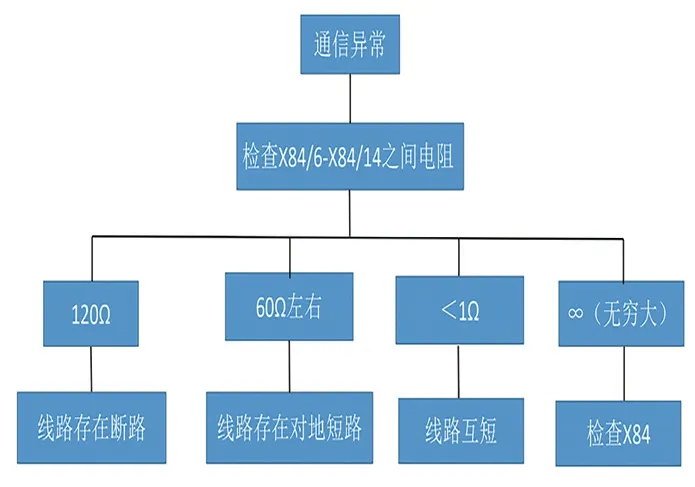
图9 网络通信系统故障诊断思路
通过对诊断接口CAN-H与CAN-L之间电阻的检测,可以对CAN网络故障有一个基本的了解。在进行电阻测试时,需要注意的是CAN网络系统电压对数据准确度的影响。在本案例中,作者提到关闭点火开关后进行检测,这只说对了一半,另一个条件是:网络进入休眠状态。不同厂家不同车型进入网络休眠所需的时间会有所不同,但大部分需要等待3min以上。否则,检测得到的数据是错误的。笔者在实际测试中曾经遇到过电阻70Ω其实也是正常的情况,因为线路还带电,有时甚至将万用表的表笔反接进行测量,数据也会有较大变化。因此,必须等待系统进入休眠状态,或者拆下蓄电池负极,使网络通信系统停止工作后再进行电阻检测。
本案例中,作者通过对系统的测试,得到线路中存在68Ω的电阻,也就是说,相当于在发动机控制单元一侧的电路中串联了一个电阻,使得该侧总电阻达到了188Ω,按照并联电路计算公式(R=(R1×R2)/ (R1+R2))计算得到的电阻是73.246Ω,这与作者测量得到的数据接近。
通过本案例,加深了大家对通信系统的了解,以往复杂深奥的CAN系统也就不那么神秘了。最后,再次对通信系统故障检测的基本原则总结如下:
1.确定发生短路、断路的情况后,首先确认是K9/X1侧还是K9/X6侧发生的断路、短路;
2排查发生线路短路侧的线路故障;
3.排查发生线路断路侧的故障;
4.充分利用终端电阻120Ω的特性,对断路故障发生的区域进行判断;
5.采用由远及近的方法检查线路的断路、短路情况。
最后,对作者整个诊断过程简单点评,首先作者的诊断思路比较清晰,检测手段也很丰富,检测过程详细且全面,说明作者在通信系统故障诊断的经验比较丰富,为广大技术人员提供了很有价值的参考案例,值得肯定和赞赏。
