论智能车路协同的概念与机理
2020-10-23侯德藻张纪升李宏海黄子超
李 斌,侯德藻,张纪升,李宏海,黄子超
(1. 交通运输部公路科学研究院,北京 100088;2. 北京中交国通智能交通系统技术有限公司,北京 100088)
0 引言
汽车文明是现代社会的重要标志,道路交通运输是现代生活中最重要的运输方式,其发达程度已成为衡量一个国家现代化程度的标志之一。但是道路交通如同一把双刃剑,在给人们带来便利、乐趣、为社会带来财富的同时,也带来了诸多的问题,如交通拥堵、交通事故、环境污染和能源消耗等。交通问题的根源是交通需求与交通供给之间的不平衡,由于城市空间的限制,道路建设速度已经远远跟不上交通量的发展,单纯考虑增加供给,或使用交通管制措施限制交通,已经很难缓解当前的交通压力,因此人们从很早开始就寄希望于交通系统的智能化,通过更加合理的分配与调度交通资源,来解决或缓解交通问题[1-3]。
20世纪60年代,计算机出现后,人们就开始考虑利用计算机技术来实现汽车的自动驾驶和交通管理。20世纪70年代,通用汽车公司在美国交通部的支持下开始了自动公路(Automated Highway)的研究与试验,这标志着智能交通系统从构想阶段进入了研发阶段。20世纪80年代,加州大学(伯克利)的PATH项目(Partner for Advanced Transit and Highways)在自动公路研究方面的成果(见图1)令人瞩目[4-5]。2000年,美国加州交通局提出并开展协同式自动车路系统(Cooperative Vehicle-Highway Automation Systems, CVHAS)的研究。2009年美国运输部启动了IntelliDrive计划,这是美国运输部组织开展的为交通系统运行提供全新解决方案的大型ITS研发计划,在车路一体化项目的基础上深化研究车路协同控制[6-7]。
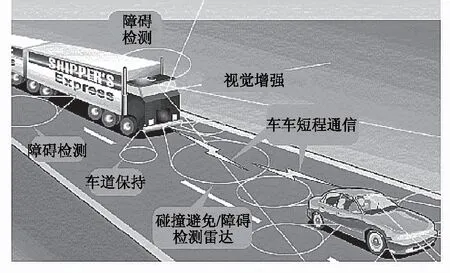
图1 美国智能车路系统(1988年)Fig.1 American intelligent vehicle-highway system(1988)
1988年,欧洲开始启动集中解决道路智能化问题的DRIVE计划,同时启动主要是由汽车制造商开展PROMETHEUS计划解决汽车的智能化问题[8-9]。2001年欧盟发表题为“欧盟交通政策2010年:由时间来决定”的白皮书。白皮书提出到2010年道路死亡人数减少一半的宏伟目标。为实现这个目标,欧盟启动了eSafety计划,该计划期望通过信息和通信技术作为解决方案,开发更安全的智能汽车安全系统。2015年5月为深化V2X通信服务方面的研究,欧洲开始了CODECS(Cooperative ITS Deployment Coordination Support)项目以促进协同式智能交通系统的研究。
同样在1988年,日本也开始了包括超级智能车辆系统(Super Smart Vehicle System, SSVS) 和先进的道路交通系统(Advanced Road Traffic System, ARTS)在内的研究计划[10]。2004年日本提出了Smartway项目,并从2005年开始研究新一代的道路交通服务系统,2007年形成了ITS车载和路侧单元标准,并进行了Smartway的成果示范,2009年开展了基于ITS的安全行车技术示范;以Smartway的研究做基础,2011年,ITS Spot在全日本高速公路上开始安装使用。日本已经在全国安装了1 600个ITS Spot路侧设备,城际高速安装间隔为10~15 km,城市高速路安装间隔约为4 km。从ITS Spot项目开始,日本进入了系统研究车路协同的新阶段。2015年,ITS Spot项目正式更名为“ETC 2.0”项目[11]。
实际上,欧美日于1994年正式提出ITS概念时,本身就含有车路协同的思想,即车与路以及车与车之间可进行信息交互与协同控制。1995年我国的研究者也开始注意到了智能车路系统的相关研究,当时对智能车路系统的理解主要集中在先进的汽车控制系统、先进的交通管理系统与先进的驾驶员信息系统3个部分[12],但彼时相关研究在中国并未大规模开展。2003年,笔者随交通部代表团赴西班牙马德里参加第10届ITS世界大会,注意到发达国家对车载系统与道路设施的协调配合日益重视,仔细调研了美国VII(Vehicle-Infrastructure Integration)、CVHAS (Cooperative Vehicle-Highway Automation Systems)、日本Smartway等项目情况[13],回国后立即组织在交通运输部公路试验场搭建智能车路系统的原型试验系统(图2),并于2007年北京14届ITS世界大会期间,向各国来宾做了集中展示。自此车路协同的理念在国内逐步得到认同。
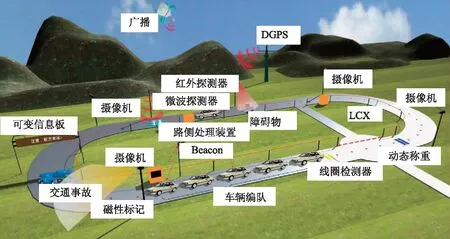
图2 中国智能车路原型试验系统(2003年)Fig.2 Chinese intelligent vehicle-infrastructure prototype test system (2003)
自2009年开始,在国家科技支撑计划、863计划等支持下,交通运输部公路院、清华大学等陆续开展了京津塘高速公路运营安全与服务、智能车路协同关键技术等研究级示范应用。而随着自动驾驶技术的爆发式发展,并伴随着大数据和5G技术的快速发展,不光要发展智慧的车辆还要发展智慧的道路,将车辆和道路整合成一个有机的整体,成为研发热点。
1 车路协同思想和内涵的演进
近年来,随着自动驾驶技术的发展,车路协同经常作为与“自主式”自动驾驶相对应的一种技术路线被提及,但正如引言中所述,车路协同本身并不是近年才出现的新概念。所谓协同,就是指协调两个或者两个以上的不同资源或者个体,协同一致地完成某一目标的过程或能力。对于道路交通系统而言,“车”与“路”作为基本组成要素,由于不同“车”的道路占有权是彼此互斥的,随着车辆数量的增加,必然导致道路交通系统的根本矛盾,即个体驾驶行为的自利性与道路资源有限性的矛盾。这种矛盾一方面会导致交通拥堵,另一方面也会显著的增加交通事故的概率[14]。因此,交通管理控制的终极目标就是减小乃至消除“车”与“路”的根本矛盾,实现道路交通系统的安全、高效、稳定运行,这也正是车路协同的基本思想。
回顾道路交通系统发展历史,人们一直在利用交通规则来缓解“车”与“路”的矛盾,从最开始的道路划分左右车道行驶,到标志标线、信号灯,直至为更加充分利用道路资源而设计的潮汐式车道,都是为了让复杂的道路交通系统能有序协同运行。在道路交通的人、车、路(环境)闭环系统中,人(驾驶员)是决策与实施控制的主体,“车”只是人物理的延伸,所以传统的道路交通系统本质上是一个“人-人”协同系统。但随着路网规模增大、车辆数量增加、规则复杂程度越来越高,由人来主导的协同效能也逐渐达到瓶颈;同时人也是系统中“稳定性”最差的一个要素,人容易受自身和环境影响,导致感知、决策和执行等方面能力的变化,而这种变化多数是不可预测的,因此仅依靠人自身的能力来协调解决“车”与“路”的矛盾变得越来越困难。
随着现代信息技术以及人工智能技术快速发展,智能交通技术深度应用,传统的车路协同手段也逐渐向智能化的车路协同技术转变,即通过不断提升车辆以及道路智能化水平,降低乃至消除对“人”的依赖,同时依赖个体的决策方式向依赖更加丰富信息的全局决策方式方向发展,从而实现系统安全高效运行。由于过去20年移动通信技术发展始终无法满足低延时、高可靠的车路交互要求,针对交通安全的智能车路协同应用一直进展缓慢,但车路协同思想在公路收费服务以及个别领域得到了积极探索和实践。例如,研究始于2000年的智能公路磁诱导技术,以布设在车道上的磁道钉及其编码为参考标记,以车载传感器探测磁信号并经运算确定车辆相对位置,并据此进行车道保持控制或偏离预警(图3),由于其全天候工作的特点,基于该技术的辅助驾驶系统在新疆冬季除雪车辆上得到应用,为驾驶员提供视野增强和拓展功能,取得了良好的效果[15]。另外,我国公路电子不停车收费ETC技术研发始于20世纪90年代中期,其核心底层技术是交通专用短程通信(DSRC)技术(图4),支撑了OBU与RSU之间的实时支付交易[16];2019年全国取消高速公路省界收费站后,在高速公路省界、每个互通立交、入出口之间设置ETC门架系统,实现对所有车辆“分段计费、出口收费”,可以说是当前规模最大的车路协同应用。
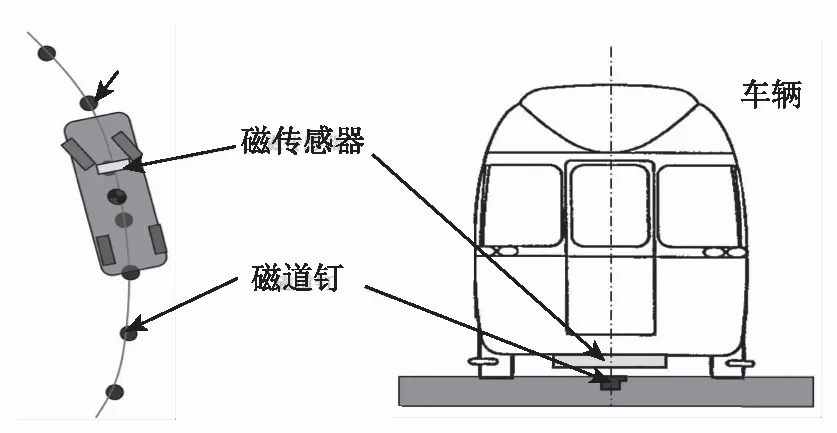
图3 智能公路磁诱导技术Fig.3 Magnetic guidance technology for intelligent highway
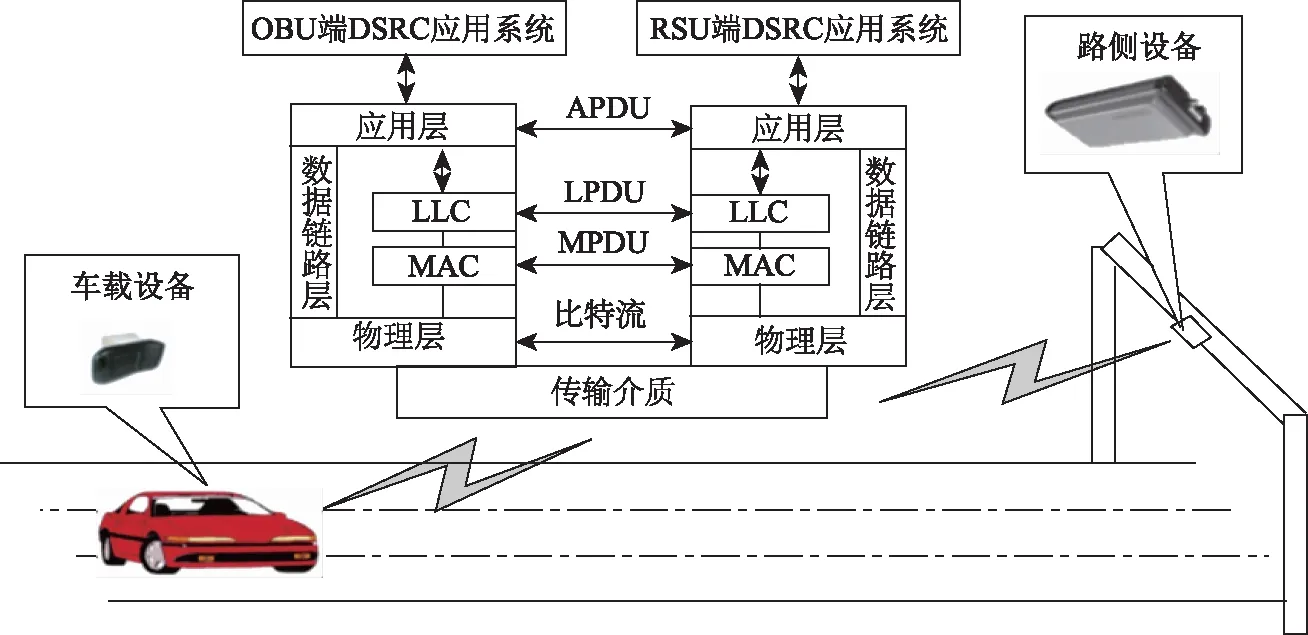
图4 基于DSRC的电子不停车收费Fig.4 ETC based on DSRC
综上,车路协同反映了载运工具与基础设施之间的一种关系,它是以解决“车”与“路”的矛盾为基本宗旨,代表着将“车”与“路”看成一个整体来构建完整的智能交通系统的思想,是当前技术条件下智能交通系统在道路交通领域的具体表现之一。
2 智能车路协同的概念及架构
正如上节所述,从解决车路矛盾的角度看,车路协同是一个相对广义的概念,包含了车路(含车车)间信息或能量交互,及其所支撑的信息服务、交通管理以及车辆调度与控制功能。之所以称广义,主要体现在两个方面:一是车路交互是广义的,车路交互的内容除了信息,也可以是能量,因此电动汽车在行驶过程中的无线充电行为也属于车路协同,关于信息交互形式,除了无线通信,磁道钉编码也属于信息交互;广义的另一方面含义是指车路交互支撑的应用是广义的,既包括信息服务、交通流管控、收费等宏观全局性的应用,也包括车辆驾驶操控等微观局部应用(图5)。
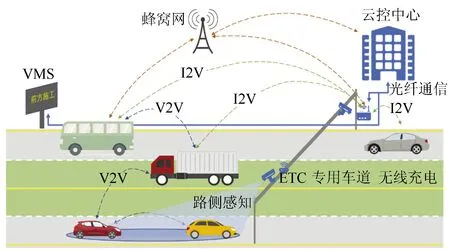
图5 智能车路协同系统示意图Fig.5 Schematic diagram of intelligent vehicle- infrastructure cooperation system
但随着无线通信和人工智能技术的发展,特别是5G技术的应用,业界对智能车路协同的期待更多聚焦在依托高可靠、低延时的车路直连通信,面向交通安全和车辆控制功能的应用上。其核心是强调运载工具和基础设施间的实时交互和动态调整,改变传统的车和路之间交互方式,实现车载功能和路侧功能的合理划分和协同操控、信息资源在车辆和基础设施之间的优化分配与平衡,大幅地提高道路交通的安全性和可靠性,同时达到优化利用系统资源、降低成本及节能减排的目的。
智能车路协同系统的通用架构如图6所示,其中,在车载端,由车载传感器感知周边局部环境,并融合路侧及中心的控制指令后进行相应的执行操作;路侧端可通过传感、通信等方式对关键节点、路段的交通运行状况进行采集,并及时将决策与执行指令下发至车载端,同时将相关的节点、路段信息上传至云控中心;云控中心主要负责汇总各路侧节点以及车辆端的信息,可进行路段或整个路网的交通信息汇集与存储,执行全局优化算法,实现整个路网的优化调度管控。
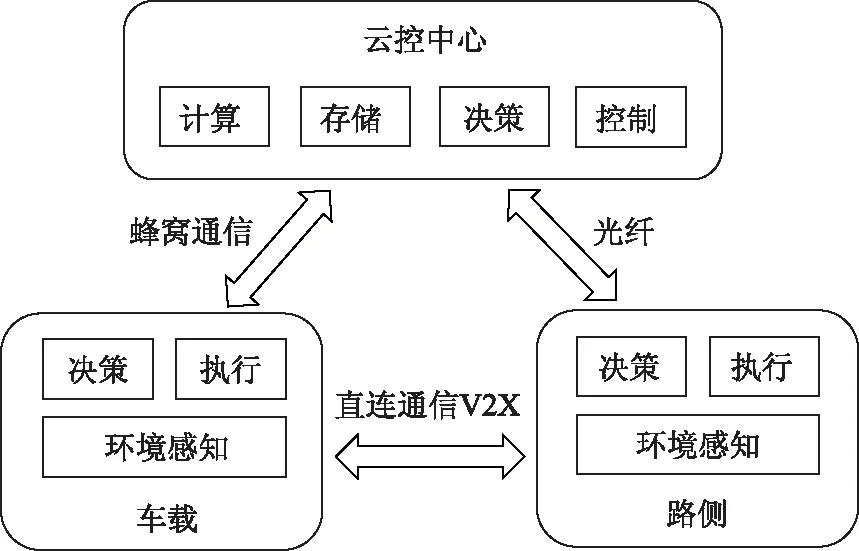
图6 智能车路协同通用架构Fig.6 General framework of intelligent vehicle- infrastructure cooperation
车路/车车间直接信息交互,即车路直连通信(V2X),是构建智能车路协同应用的底层和基础支撑技术,这也是智能车路协同应用区别于其他传统的智能交通应用的最显著特征。这里所指的直连通信是指路侧、车载设备通过无线传输方式,实现车与车、车与路直接通信和信息交换。目前国家规划5905-5925MHz频段作为车路直连通信的工作频段。关于我国V2X技术路线,一方面,交通专用短程通信DSRC已成功应用于ETC,车载用户已突破2亿,产业链相对成熟,同时已为车路协同拓展应用预留了接口和信道资源;另一方面,基于4G-LTE的LTE-V2X技术已逐渐成熟,并且正在向5G-V2X演进过程中,为V2X提供了更多的技术选择。目前业界已经就DSRC和LTE-V2X 融合形成了初步共识,例如:采用双模芯片的T-Box,作为DSRC与LTE-V2X协同方案的一种探索。
3 智能车路协同的机理
智能车路协同系统以低延时、高可靠的车路直连通信技术为基础,将“车”与“路”看成一个整体来实现智能交通创新应用。而关于如何实现车路智能协同?本研究认为至少应从功能协同、运行协同以及体制协同等3个方面深入探讨(如图7所示),其中,功能协同涉及车路间功能合理划分及其软硬件成本均衡分摊,主要面向系统设计阶段;运行协同主要解决系统运行时计算、通信等信息资源的动态分配问题;体制协同主要指推动车载和路侧系统协同部署的标准、政策、法规等。
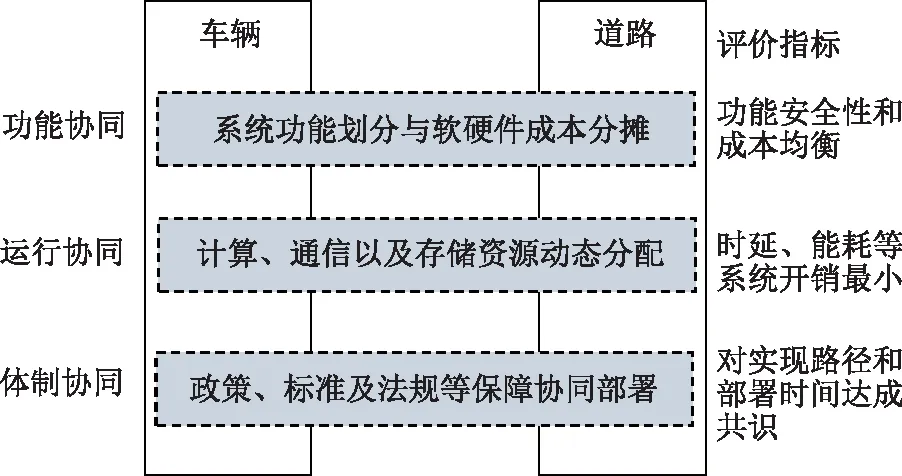
图7 智能车路协同机理Fig.7 Mechanism of intelligent vehicle-infrastructure cooperation
3.1 车载和路侧的系统功能划分
(1)功能安全导向的比较优势分析
车载智能化可以逐步代替人类驾驶员实现自动驾驶,但仍属于单车自主驾驶行为,每辆智能汽车都努力建立一个为自己所用的环境模型,获取车辆周边的信息并进行决策;汽车对环境的感知范围受到车载传感器探测范围(相当于人类驾驶员的目视范围)的限制,局部环境信息所涉及的范围不会增加很大,其提高交通安全的程度也受到很大制约。
而路侧智能化则不然,车载智能不擅长的远距离、盲区信息感知以及大算力任务需求等功能可以转移到路侧系统实现,无论是局部环境信息还是宏观全局信息,特别是安全行驶所需的信息,都可由路侧信息基础设施实时获取后加以处理,并适时地提供给过往汽车,甚至包括直接驾驶控制指令。
分析车载和路侧智能的技术比较优势(表1),可以从优势互补的角度更加合理地配置车载和路侧的功能,同时从提高系统功能安全的角度进行适当的冗余设计。
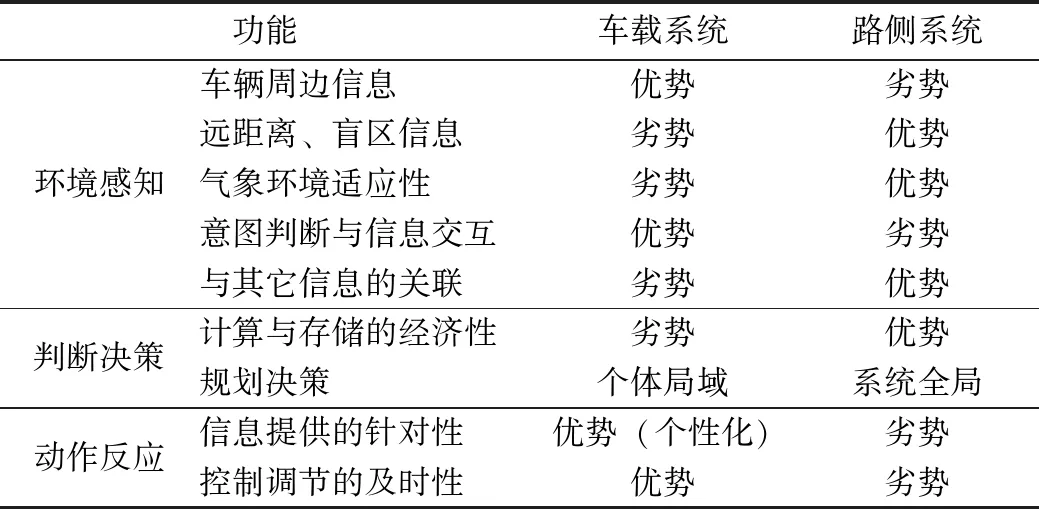
表1 路侧功能和车载功能的技术比较优势Tab.1 Comparative advantages between roadside function and on-board function
(2)软硬件成本分摊
为了保证智能汽车的功能安全和可靠性,对车载系统一般会采用冗余设计的原则,从而使系统成本居高不下,例如Waymo的L4级无人驾驶车的单车成本在40万美元左右,这些成本中大部分都用在确保安全的车载传感器以及冗余系统上。同时,智能汽车为了不至于使自己的驾驶行为过于短视,所建立的环境世界模型都尽可能扩大,很多多余的信息被每辆智能汽车重复获得,这些软硬件及时间上的开销都是不必要的。
按照车路协同的思想,将部分环境信息感知功能,特别是远距离和盲区信息感知功能,转移到路侧系统来完成,经过处理后再广播分发给过往车辆,可以最大程度地扩大汽车期望获得的局部环境信息范围,此外由于路侧信息可被所有经过车辆充分共享,使系统总成本大大降低。同时,我们可以将车载和路侧系统作为一个整体来考虑冗余设计,可以减少智能汽车自身的冗余功能,从而进一步降低车载系统的成本。
车载系统和路侧设施具有不同的属性。公路基础设施属于准公共物品,具有非竞争性和非排他性,投资大、回报周期长,还具有网络经济性的特征,在网络建成并投入使用后,运营企业的固定成本很高而边际成本极低,即随着道路使用用户规模的增加,单位服务成本将大大降低。汽车属于消费品,遵循市场规律,新功能和产品价格随着产销量(用户规模)增加会迅速下降。但用户规模的增加有一个市场导入和培育的问题,即用户需要体验到车路协同功能带来的好处和收益,而这必须有路侧系统的配合。这就是俗话所说的“先有鸡,还是先有蛋?”问题。路侧设施和车载系统本质上是服务和被服务的关系,一般而言,基础设施作为服务方应先行一步,为车载用户创造好的环境和条件,从而引导用户规模的迅速扩大。可以考虑在高速公路流量大的路段率先部署路侧系统,普通公路的视距不良路段等也可先期试点,吸引车载用户使用。
3.2 车载与路侧的资源动态分配
在现代信息系统中,所有的基础设施以及运行模型,都是在存储、计算、通信这3大资源中取舍与调度[17]。车路协同运行的核心思想就是计算和通信资源在车载设备和路侧设备间的优化分配,优化目标是系统开销最小化。计算任务一般是由车载设备发起的,但车载的计算和存储资源不如路侧设备丰富,计算能力有限,对计算时延和能量消耗非常敏感;如果将计算任务交给路侧设备执行,利用路侧设备强大的计算和存储能力,使计算时延大大降低,但需要容忍传输时延的影响。
本研究将时延和能耗作为衡量系统开销的主要因素。假设有n个车载计算任务Taski,si为任务Taski所需要的计算量,可具体表示为CPU周期数。对每一个任务Taski,均有车载和路侧两种执行方式可选择,尽管两种方式均会带来时延和能耗,但不同方式对时延和能耗的敏感和容忍程度是不一样的,可通过设置权重因子来表示[18]。下面讨论两种执行方式的时延和能耗模型。
(1)车载执行方式

(1)
式中α和β分别为车载执行的时延和能耗权重因子。
(2)路侧执行方式
(2)
式中γ和δ分别为路侧执行方式的时延和能耗权重因子。
(3)优化目标函数
对于任务Taski,假设不考虑计算冗余的情况,即一个任务只能在两种方式中选择其一,则该任务的系统总开销为:
(3)
式中,di为决策参数,di∈{0,1}。当di取1时,表示该任务在车载执行;当di取0时,表示该任务在路侧执行。
则系统资源分配优化的目标函数为:
(4)
式中D={d1,d2,d3,…,dn}为智能车路协同系统执行n个车载计算任务时,计算和通信资源在车载与路侧之间的优化分配决策集,它充分考虑了车载执行方式和路侧执行方式的计算能力和通信资源差异,以及二者对时延和能耗的敏感和容忍程度,最终实现系统总的时延和能耗开销最小。
3.3 体制机制层面的协同部署
提到车路矛盾问题,除了前面第3.2节提到的技术层面原因,还有体制层面的原因,即道路基础设施与汽车制造分别属于不同的行业,尤其在我国分别由不同的行业部门管理,因此长期以来道路和汽车的技术升级发展基本是相对独立的。同时两者的物理形态和运行模式差异很大,道路基础设施属于土木工程,一般道路设计寿命周期在20~30 a左右,桥梁和隧道等重要构造物设计寿命在50~100 a;而汽车整车寿命一般10 a,很多私家车5 a左右就更新,近年来车联网的发展使车载电子和信息设备的比重越来越高,从某种意义上讲现在的汽车就是一辆移动的信息终端,其车载设备寿命周期2~5 a,车载软件和数据甚至可以实时下载更新。
综上,道路设施和汽车系统的技术升级改造往往是不同步的。我国智能交通20多年的发展大大推动了城市道路和高速公路信息化应用水平,使得道路设施智能化程度越来越高,但与车载系统和移动终端相比,道路设施对新技术的反应速度一般是滞后的。因此,所谓车路协同,不仅仅指功能配置和资源优化层面,还应包括体制层面的协同,需要不同管理部门及产业链各方对涵盖技术、标准、法规等各方面的实现路径和时间节点等达成共识,才有可能实现车载系统和路侧系统的一体设计、协同部署。
标准化是体制机制协同推进的主要手段和方式。一方面,标准是车路、车车间直连通信和功能互操作的基础;另一方面,地域分布的广泛性和移动的随机性是道路交通的突出特点,实现全国兼容是车路协同系统的基本要求,而标准化是实现全国兼容性的最有力保障,应推动汽车、交通、通信等各领域标准化工作协同。
4 结论
车路协同并不是近年才出现的新概念,它是20世纪末伴随智能交通系统(ITS)发展而提出的。从解决车路矛盾的角度看,车路协同是一个相对广义的思想和概念,即由车路(含车车)间信息或能量交互,所支撑的信息服务、交通管理以及车辆调度与控制功能。由于过去20 a无线通信技术发展难以满足低延时、高可靠的车路交互要求,针对交通安全的车路协同应用一直进展缓慢,但车路协同思想在电子不停车收费ETC、公路磁诱导等领域得到了积极探索和实践。
随着无线通信技术特别是5G技术以及人工智能技术的发展应用,基于低延时、高可靠的车路直连通信技术、聚焦交通安全和车辆控制功能的智能车路协同应用成为业界关注的热点。关于智能车路协同的工作机理,即如何实现车路协同,本研究认为至少应包括功能协同、运行协同、体制协同等3个层面,在系统设计阶段的功能协同层面,应重点考虑路侧功能与车载功能的技术比较优势,并将车载和路侧功能作为一个整体进行冗余设计和软硬件成本控制;针对系统运行阶段的资源协同问题,初步建立了以计算和通信资源为对象、以系统时延和能耗开销最小为目标的车载和路侧系统间资源优化分配方法;在体制协同层面,主要从体制机制的角度阐述了涵盖标准、政策、法规等的路车一体设计、协同部署的原则。本研究成果对智能车路协同系统的设计、开发以及工程部署具有重要的指导意义。
