基于压电驱动的微振动主动减振控制系统研究
2020-10-23刘仁洪余洁冰王广源陈佳鑫张俊嵩黄良生
刘仁洪,余洁冰,王广源,康 玲,陈佳鑫,张俊嵩,刘 磊,黄良生
(1.中国科学院 高能物理研究所,北京 100049;2.散裂中子源科学中心,广东 东莞 523803)
随着先进同步辐射光源的发展,国内外同步辐射光源加速器储存环中的高精度BPM支撑系统和光束线站中的光学系统、实验样品台等精密设备对抗振性能要求很高,各零部件之间的微位移和微小变形,均会影响设备的总体性能[1-3]。欧洲同步辐射光源(ESRF)、美国先进光子源(APS)、上海同步辐射光源(SSRF)等同步辐射光源对设备的微振动研究表明,5~20 Hz频域段的外界振动干扰对精密设备的微振动幅值影响最大。低频微振动由于具有微小性、固有性和难控性等特点,分析与振动控制难度均较大,对低频微振动的控制已成为先进同步辐射光源和自由电子激光等大科学装置发展不可忽略的关键技术之一[4-5]。根据控制原理的不同,减振主要可分为被动减振技术和主动减振技术及半主动减振技术[6],像ESRF、APS、SSRF等同步辐射光源对微振动的隔离主要采用附加高性能阻尼材料方法,使振动传递率接近1,这种被动减振方式结构简单,不需额外提供能源,对高频振动抑制效果较好,但对低频振动减振效果不佳,且适应性较差,同时阻尼材料长期受辐照易老化[7]。随着科学技术的发展,被动减振方法在很多方面无法满足高能同步辐射光源等设备对减振性能的工程需要,主动减振越来越受到重视,主动减振控制由于促动器的存在,具有低频减振性能好、可靠性高、易于扩展及易于实现多机分布并行处理等优势,核心控制器也从PID、鲁棒性控制逐步向模糊控制、自适应控制等方向发展[8]。紧凑型直线对撞机(CLIC)研发的主动减振控制系统,通过PID控制算法实现特殊主四极磁铁对地基与磁铁冷却水流激振影响的抑制,取得了一定的减振效果[9-10]。美国TMC公司生产的压电式主动六自由度隔振平台,其最大减振振幅为24 μm,减振频率范围为0.5~250 Hz,国内并联平台的制造工艺和减振效果与国外还存在一定差距,大部分停留在实验室阶段,尚未达到产品化和产业化应用。目前国内同步辐射装置主要是购买国外的主动减振平台,采购成本较高[11]。
针对高能同步辐射光源和南方先进光源对主动减振技术的需求,本文以压电陶瓷驱动的并联六自由度平台为基础开展低频微振动主动减振控制技术研究,研究适应性强且不需被控系统数学模型的Fx-LMS自适应控制算法,以NI Compact-RIO构建主动控制单元,实现系统次级通道辨识和主动减振控制功能,并进行实验测试验证。
1 低频微振动主动控制原理
在实际控制工程中,被控系统的数学模型很难事先通过机理建模来确知,尤其是数学模型的某些参数或结构处于变化之中。面对这些未知与变化情况,如何设计合理的控制系统,是自适应控制算法所需解决的问题。
1.1 Fx-LMS主动控制原理
Fx-LMS自适应控制算法原理如图1所示。其中,x(n)为滤波器输入信号,即减振系统中外界基础激励信号;P(z)为未知对象模型,在主动减振控制系统中,它是外界振动基础激励到等效负载的传递函数;W(z)为数字滤波器的权向量;d(n)为没有滤波器时系统的输出信号(也称期望信号);y(n)为控制滤波器输出,即促动器产生的振动控制信号;e(n)为系统等效负载的振动响应信号。在实际应用中,e(n)并不是滤波器输出y(n)与期望信号d(n)的简单叠加。在y(n)与e(n)之间存在一次级通道传递函数S(z),S(z)是促动器到等效负载的传递函数,表示促动器的动力学特性。次级通道S(z)在物理上的影响主要包括D/A、功率放大器、主动执行机构、被控系统、误差传感器和A/D等环节,针对以上误差影响,Morgan等[12]提出了Fx-LMS自适应控制算法可有效地消除次级通道的误差影响。
e(n)=d(n)-STY(n)=
(1)
其中,Y(n)为输出向量。
定义输入滤波后的参考向量为X′(n)=[x′(n),x′(n-1),…,x′(n-L+1)]T,则误差信号可写成如下形式:
e(n)=d(n)-X′T(n)W(n)
(2)
取性能函数J为:
J=E{d2(n)-2dT(n)X′T(n)W+
WTX′(n)X′T(n)W}
(3)
参照标准LMS算法的推导过程,并进行归一化处理,得到权向量更新公式:

(4)

综上所述,整个Fx-LMS自适应控制算法可简单地归纳如下:
(5)
1.2 次级通道辨识原理

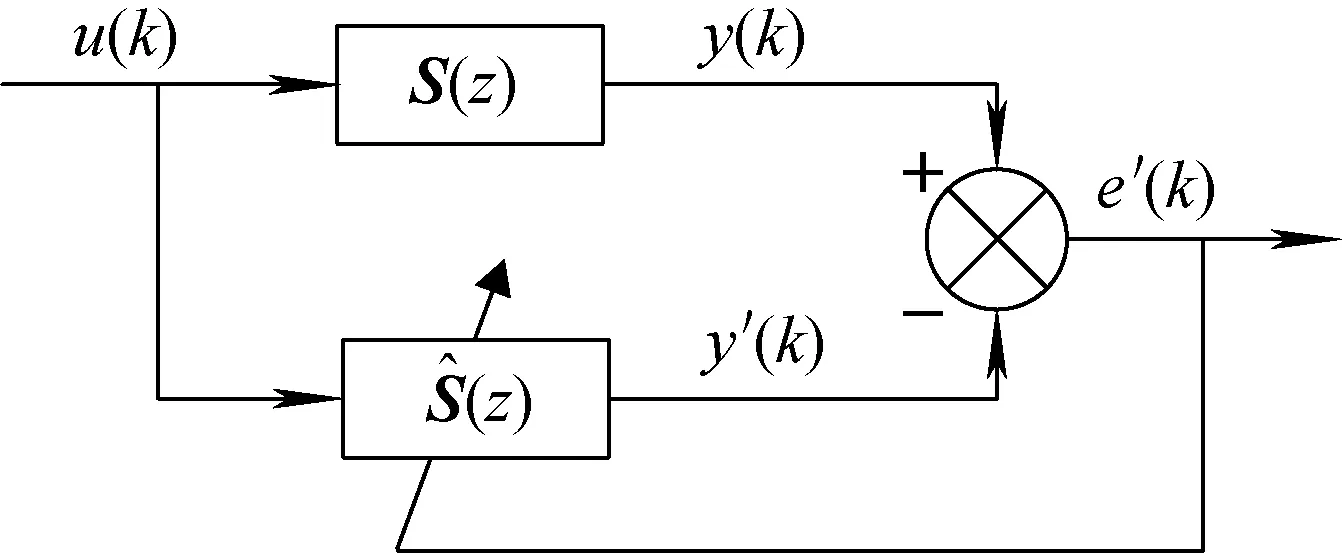
图2 系统次级通道辨识框图Fig.2 System identification of secondary path
1.3 主动减振控制算法仿真研究
本文利用Matlab软件对主动减振控制算法进行仿真验证。首先假设要辨识的通道模型,本文假设要辨识的通道模型为S(z)=[0.038,0.087 5,-0.175,0.35,-0.175,0.087 5,0.21,0.038 5,0.084,-0.105],取促动器输出的振动信号u(k)为高斯白噪声,幅值为2 mm,V的长度取14,迭代因子μ1=0.1,辨识次数为2 000次,仿真结果如图3所示,可看出,上述次级通道辨识算法可有效地辨识出系统模型参数。

2 主动减振控制系统
2.1 实时控制系统硬件设计
主动减振控制系统对控制系统硬件的响应速度和实时性有较高要求,控制系统反应速度要求达到0.05 ms以下,本文选择NI的分布式测量与控制系统Compact-RIO设备作为核心控制部件,其固件主要包含:I/O模块、可重新配置的现场可编程门阵列(FPGA)的机箱、实时控制器。控制系统的处理器内核667 MHz,通信可配置40 MHz,最快处理速度可达到40 ns,FPGA处理能力和处理速度能有效满足主动减振控制系统对实时性的要求,控制系统配置1个两通道的NI-9250 A/D采集输入模块实现基础激励和平台振动响应信号采集,同时配备2个四通道的NI-9263D/A输出模块,可实时输出主动控制量,驱动压电促动器作用实现平台主动减振控制功能。
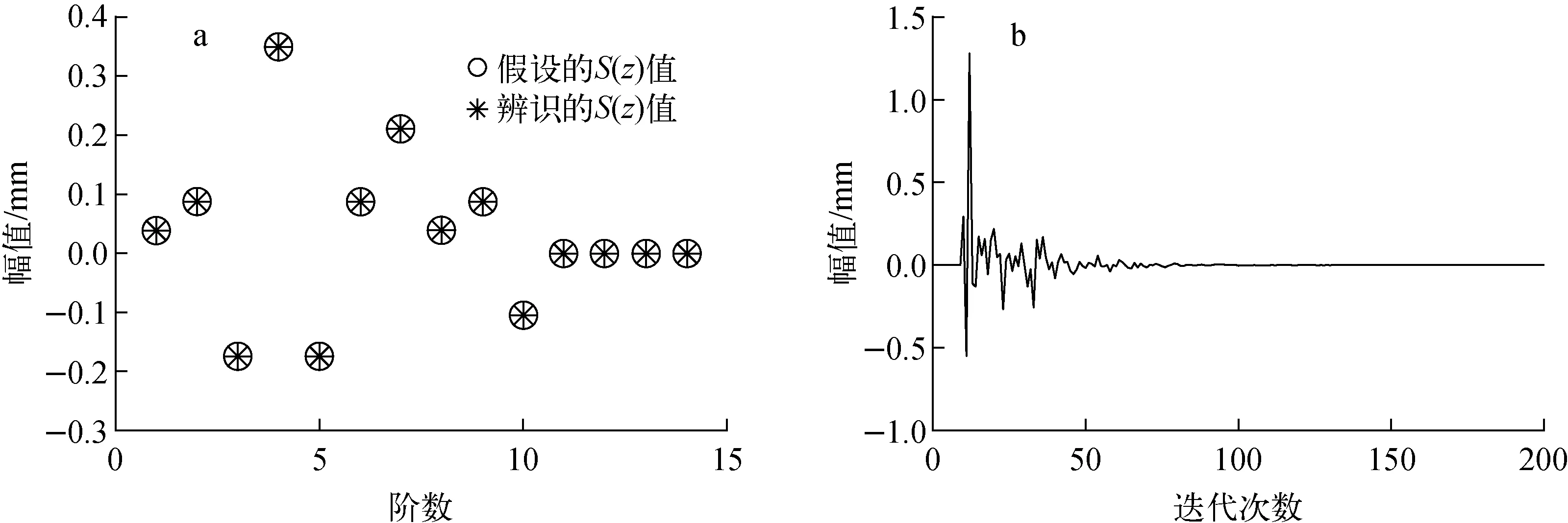
a——次级通道辨识结果;b——次级通道辨识过程中的误差图3 次级通道辨识仿真测试Fig.3 Simulation test of secondary path identification
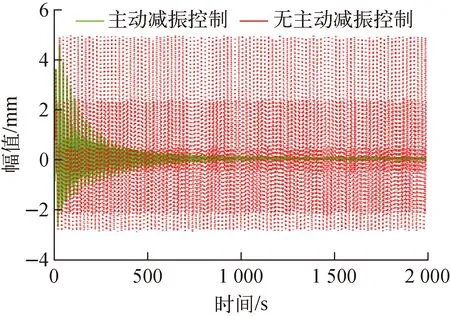
图4 主动减振控制算法仿真Fig.4 Simulation of active vibration control algorithm
2.2 压电驱动单元设计
压电陶瓷驱动装置是主动减振控制系统中的核心部件之一,本文压电促动器控制方式,将控制器Fx-LMS算法解算出来的反馈电压控制量(±5 V范围内),通过Compact-RIO中的D/A板卡输出,并实时输入给压电陶瓷驱动器,通过驱动模块的偏置调节,将电压转换成0~10 V,然后通过控制器的12倍放大器输出0~+120 V的电压驱动压电陶瓷促动器动作,实现实时驱动压电促动器对减振系统产生反作用力,达到减振的效果。
2.3 控制系统设计
本文设计的主动控制系统的控制过程主要包括两部分:次级通道辨识过程和主动减振控制过程,估计次级通道传递函数的过程称为次级通道的建模过程,在实际应用中,首先关闭系统的外部干扰源,FPGA控制器产生高斯白噪声电压信号输出给压电陶瓷控制器,并将其作为次级通道建模的激励源信号,通过次级通道辨识算法计算出系统V,当辨识一定次数后,V趋于稳定,从而分析得到减振系统的次级通道参数;然后转而进入主动控制过程,通过振动信号采集与主动控制算法(Fx-LMS自适应控制算法)的迭代计算控制,实现自适应主动振动控制功能,整个控制过程的流程如图5所示。主动减振控制系统软件架构如图6所示,系统软件主要由上位机RT软件和下位机FPGA软件两部分组成,上位机与下位机之间通过FIFO数据传输模块实现控制信号通信与过程数据传递。上位机软件主要由振动数据显示界面、次级通道辨识界面和主动减振控制界面组成,作为人机交互界面主要实现振动数据实时显示、次级通道辨识参数结果及辨识误差和主动减振控制效果等数据的显示及其相关控制参数设定功能。下位机软件主要由振动数据采集模块、次级通道辨识算法模块、Fx-LMS算法模块和六通道压电陶瓷驱动控制模块组成,主要实现系统运行过程中的振动数据采集与传输、闭环控制信号输出控制和主动减振控制等功能。整个控制系统软件是在NI的FPGA与RT实时环境下实现。
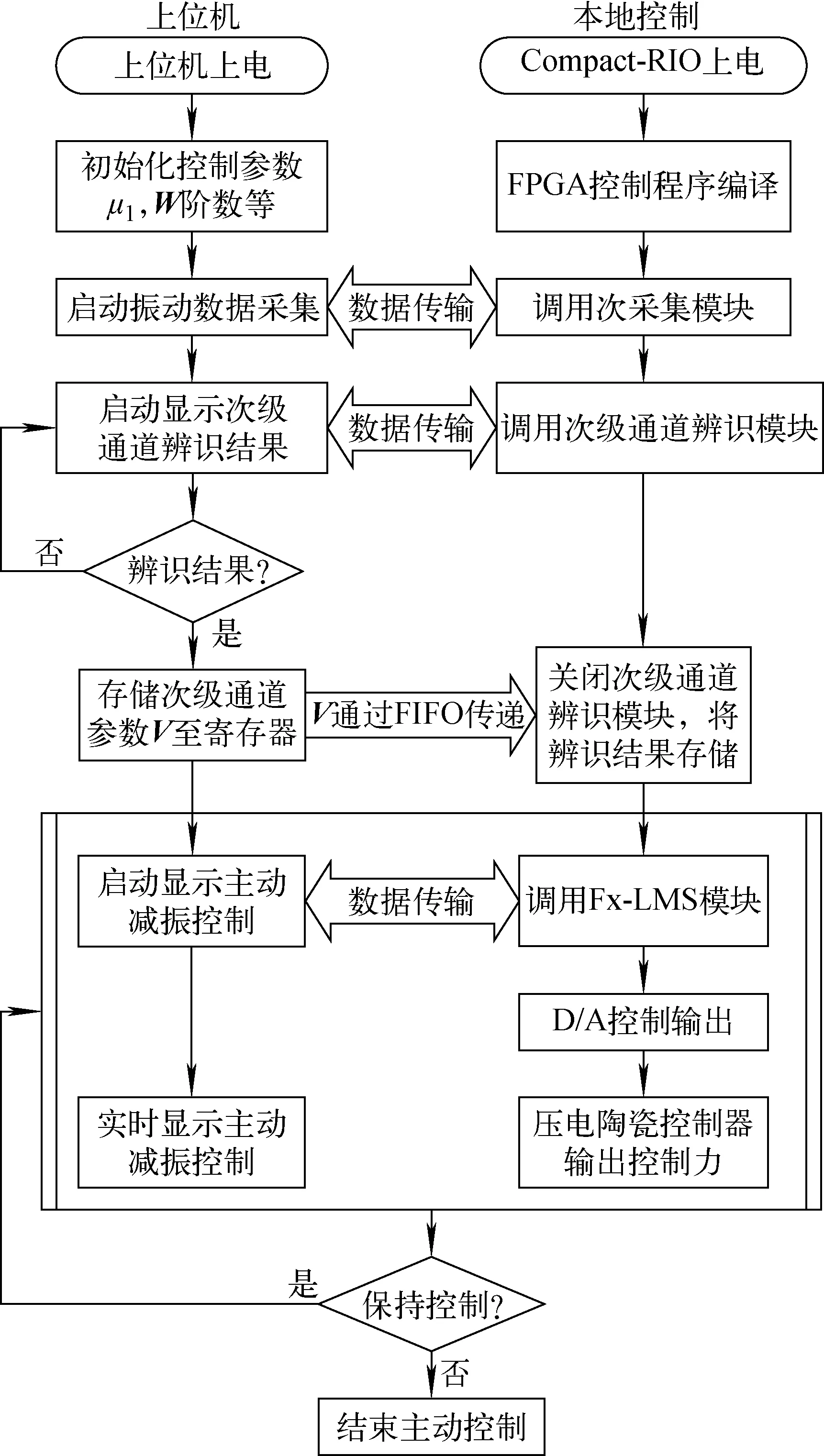
图5 主动控制流程图Fig.5 Flow block of active control system
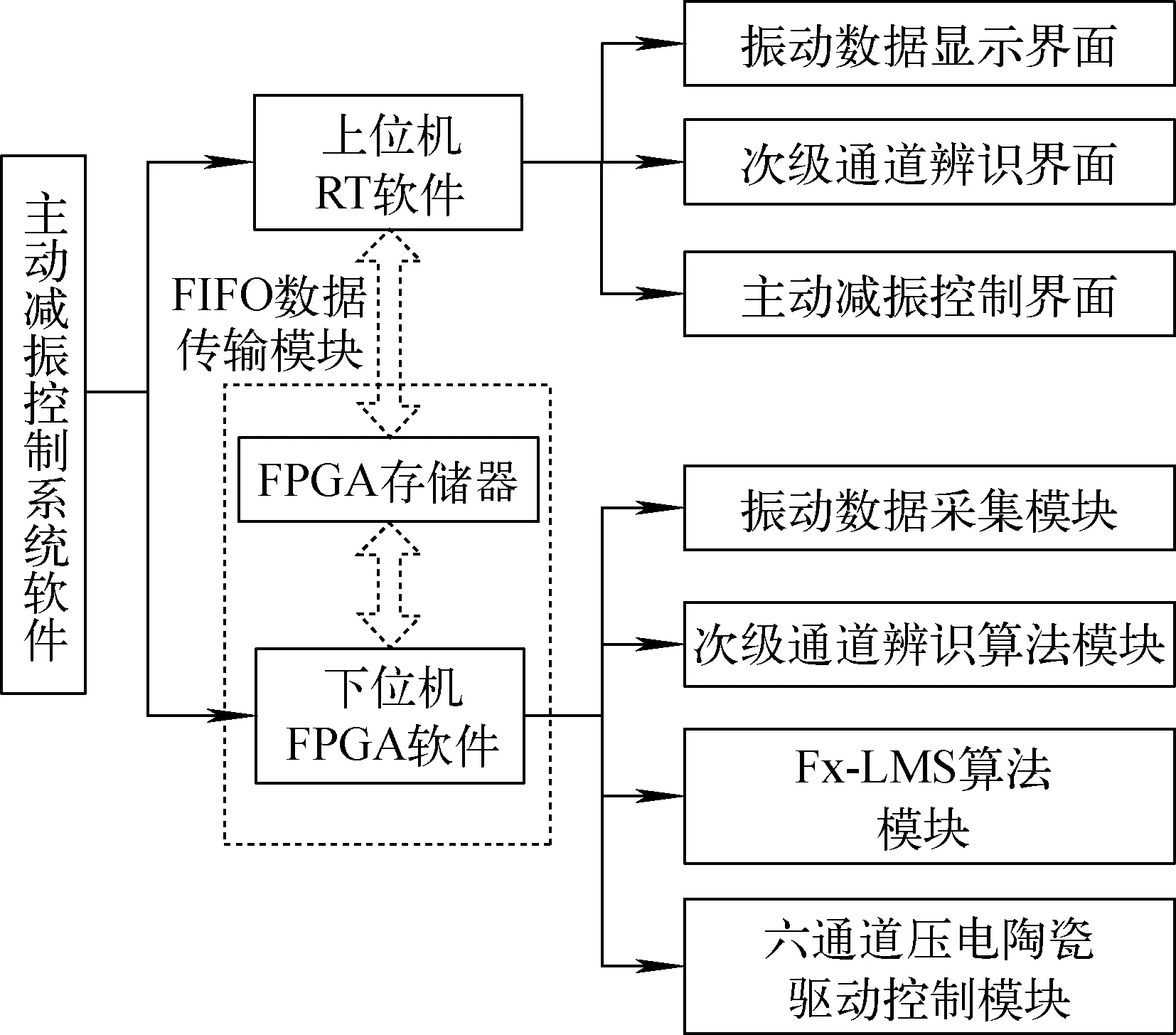
图6 主动减振控制系统软件架构Fig.6 Software architecture of active vibration control system
3 主动减振控制实验研究
本文是在并联六自由度平台上搭建单方向主动减振控制系统,主要用于控制平台垂直Z方向的低频微振动。控制系统中的振动采集模块实时采集并联平台上下平面Z方向的加速度信号,信号通过Compact-RIO的电荷放大调理,然后将系统激振信号和平台响应信号实时传递给FPGA处理器,FPGA中的Fx-LMS模块对控制目标信号进行分析处理,得到实时反馈控制量,并通过输出模块发出控制信号,经压电控制器驱动压电陶瓷促动器产生反作用力作用于并联平台上平面,达到减振的效果。
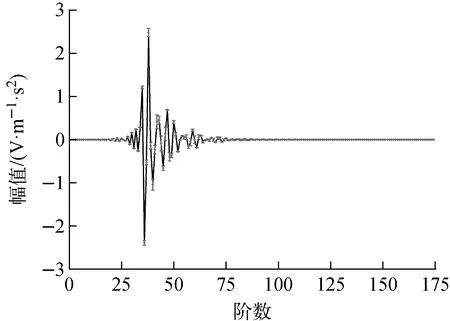
图7 主动减振控制系统次级通道辨识结果Fig.7 Secondary channel identification result of active vibration control system
主动减振控制实验主要分为次级通道辨识与主动减振控制两部分。次级通道辨识实验首先通过FPGA控制系统产生一定长度的高斯白噪声信号,使并联平台的6支压电促动器振动,通过次级通道辨识算法模块将主动减振控制系统结构的次级误差参数辨识出来。本文采用白噪声信号驱动压电陶瓷促动器来辨识并联平台Z方向的次级通道参数,辨识结果如图7所示,可看出,系统辨识的结果清晰明了,且系统的通道参数主要集中在前80阶,呈现衰减趋势,满足基本控制理论。同时本文采用5组不同大小的白噪声信号驱动压电陶瓷促动器,通过统计分析得到并联平台Z方向在不同白噪声驱动下次级通道参数的标准差分布图(图8),由图8可看出,次级通道参数最大标准差为0.175,不同大小的白噪声信号对次级通道参数的辨识影响较小。
主动减振控制实验,首先通过数据缓存器FIFO将辨识处理的Z方向次级通道参数传递给Fx-LMS模块中的存储器,然后开启激振器,使平台按设定的激振频率和振动幅值振动,最后开启主动减振功能,使系统实时反馈控制,减少平台上平面的振动幅值。本文对平台垂直Z方向进行了不同频率的激振与减振控制实验,来检验减振系统的低频减振效果,不同激振频率作用下的减振效果列于表1。

图8 次级通道参数标准差分布Fig.8 Standard deviation distribution of secondary channel parameter

表1 不同频率激振下的减振实验Table 1 Vibration reduction experiment under different frequency exciting conditions
图9为主动减振实验结果,可看出,系统在激振器7 Hz的正弦干扰信号作用下,平台抑制低频振动的效果明显,控制后位移振动幅值从9.179 μm降低至2.247 μm,减少75.52%,在主动减振控制前后平台的振动幅值衰减量达14.665 dB。随激振频率的增大,主动减振控制系统主动减振效率和衰减量明显增大,减振效果较好。
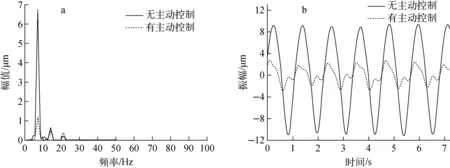
a——7 Hz激励振动测试对比(频域);b——7 Hz激励振动测试对比(时域)图9 主动减振实验结果Fig.9 Experimental result of active vibration control
4 结语
本文在基于压电陶瓷促动器驱动的并联六自由度平台上设计了一套主动减振控制系统,采用Fx-LMS自适应控制算法作为系统控制方法。对平台进行了7~50 Hz的中低频激振测试,实现了垂直Z方向的低频微振动控制,尤其对7 Hz低频激励干扰下上平台在垂直Z方向取得了75.52%的良好减振效果,从而验证了本文设计的主动减振控制系统是可行的,该系统为未来南方先进同步辐射光源精密设备的低频微振动减振系统和多方向自适应主动控制打下了基础。
