基于虚拟同步发电机技术的岸电并网控制
2020-10-23王含瑜
王含瑜
(上海海事大学 物流工程学院,上海201306)
0 引言
近些年来随着我国经济的发展也顺势推动了航运业的迅猛发展。但同时,为船舶提供动力的船用发电机也成为了海上运输行业绝大部分的污染物的来源。为了应对气候变暖这个问题的严峻考验,2018年4月,国际海事组织对航运业温室气体减排任务做出了初步的部署,提出了到2050年时温室气体的年度总排放量与2008年相较减少50%以上[1],并逐步实现碳排放为零的战略目标。
随着航运业的环保发展战略不断贯彻深入,一些港口城市的空气质量问题也是社会广泛关注的话题。由于船舶在靠岸期间需要开动船上的辅助发电机发电以满足船用电气设备的用电需求,因此会产生大量有害气体的排放,污染港口城市的空气质量。根据近些年来已知的数据统计,在靠港期间由船舶发电机所产生的碳排放量在港口总排碳量的占比达到了40%~70%[2]。出于环保的角度考虑,船舶在靠港停泊期间使用岸电供电,将预计能够减少高达98%的船舶靠港时温室气体的排放。
1 船舶岸电并网控制系统结构
船舶岸电技术又称为岸上连接或船舶电力替代系统等,是指靠港船舶接入岸电系统,由陆上的岸电为船舶提供停靠在港时的生产作业用电,而减少由于其发电机所产生的污染的一种港区空气环境治理方式。在岸电系统构成方面,尽管几乎每一个岸电方案都互不相同,但其具体的组成结构一般都分为以下3个部分:岸上的供电系统,电缆的连接设备和船舶的受电系统[3]。具体结构图如图1所示。

图1 船舶岸电系统结构图
船舶岸电系统中最重要的组成部分就是岸电变流器,岸电变流器从本质上讲就是一个大型的变频变压器。由于全球各国采用的岸电电源和各个船舶采用的电源频率为50 Hz或60 Hz不确定性;同时,船舶也有高压船舶和低压船舶。这就使得岸电系统需要具备变频变压的功能,以满足不同靠港船舶的需求[4]。图2为船舶岸电系统的结构图。
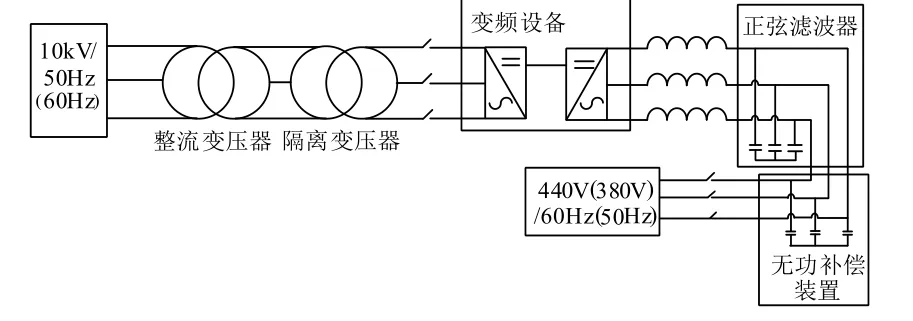
图2 船舶岸电系统结构图
岸电电源发出的三相交流电经整流器整流成直流电输入到逆变器中,直流电经过逆变器转变为三相交流电,后经过LC 滤波器的作用形成符合要求的三相正弦交流电给不同种类的船舶供电。
2 虚拟同步机技术控制方案
虚拟同步发电机技术(Virtual Synchronous Generator Technology,VSG)相较于传统的并网控制策略的优越性就是可以使岸电电源具备旋转惯性和阻尼特性[4]。这两种运行特性在同步发电机中是真实存在的,因此虚拟同步机控制控制策略在提高岸电系统稳定性上有较好的控制效果。
本文重点研究岸电系统逆变器的控制策略。图3为基于VSG的岸电逆变器拓扑结构及控制框图。

图3 基于VSG 的岸电逆变器拓扑结构及控制框图
3 基于频率与电压的并网优化控制策略
3.1 功频调节器模块
功频调节器的数学模型包括原动机调节和发电机转子运动方程两部分,此为发电机的机械部分[5],具体关系见式(1)

式中:Pm为机械功率;Pref为给定电磁功率;Kω为角频率调差系数;ω为实际转子角频率;ωn为额定转子角频率;Tm为机械转矩;Te为电磁转矩;Pm为机械功率;Pe为电磁功率;D为阻尼系数;J为转动惯量;δ为功角。其中,电磁功率Pe即为岸电逆变器的输出功率P。
结合上述数学模型分析,所设计的功频调节器的控制框图如图4所示。

图4 功频调节器控制框图
3.2 励磁调节器模块
同步发电机另一个重要的组成部分是励磁系统,它也能直接地影响发电机的运行特性。在正常的运行工况下,励磁系统的存在能维持发电机的机端电压在给定水平,当岸电和船舶辅机并联运行时,应通过励磁系统稳定地分配机组的无功功率。将对无功-电压控制的励磁调节器也引入到岸电系统的控制中来,得到相关的表达式。

式中:Uref为机端电压幅值参考值;UN为设定的系统额定电压幅值;n为无功电压下垂系数;Qref为无功功率参考值;Q为输出无功功率。
所设计的励磁控制器的控制框图如图5所示。

图5 励磁调节器控制框图
其中,Um为经计算得到的实际并网电压幅值,Ed为励磁电动势幅值。
总之,通过将功频调节器以及励磁调节器引入到岸电并网逆变器的闭环控制策略中,最终使得逆变器有了和同步发电机相似的运行特性,从而可以将其等效成一台虚拟同步发电机进行分析和控制。
4 预同步控制
对岸电与船舶进行并网操作时要确保两者的电压幅值、相位和频率保持一致,否则会使得岸电与船舶发电机在切换的瞬间产生较大的冲击电流,从而可能导致并网失败。因此需要在控制策略中再进行改进,在进行并网操作前先加入预同步控制,从而保证二者能够更加平滑地并网。
岸电电源与船舶电网之间的并网根据基准的不同分为2种方法[6]:一是以船舶电网为基准,调节岸电电源的相位、频率和电压;另一种则基准取为岸电电源侧,对船舶电网的参数进行调节与之匹配。本文设计的岸电电源与船舶电网的并网方式采用以船舶电网为基准,调节岸侧电源输出与船侧电网一致来达到并网要求。采用这种并网方式的原因是由于当前变频电源的容量所限,码头供电方式往往采用一对一的供电方式,这种并网方式不仅可以提高并网速度和准确性,便于系统的控制,也可以降低对船舶设备的要求,极大地提高了岸电码头的可连接的船舶种类[7]。预同步控制的控制框图如图6所示。
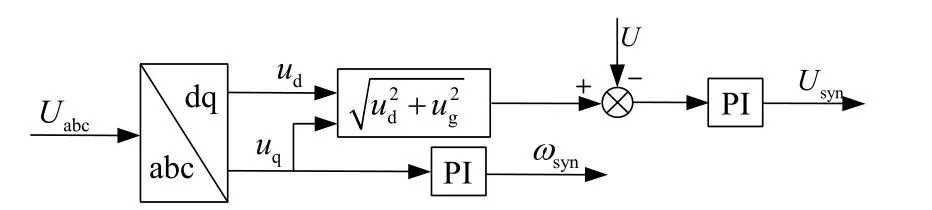
图6 预同步控制框图
岸电系统不断追踪船舶电网相位,控制系统实时检测岸电电源与船舶电网的频率差和相位差。当其均满足并车条件时,启动并车信号,闭合并车开关,实现并车运行。
5 仿真与验证
为了验证岸电与船舶并网时虚拟同步机技术的优越性,根据上述控制方法搭建了Simulink 仿真模型。
靠港船舶与港口岸电电源之间的连接操作分为2个部分:一是当船舶开始靠港时,船舶需要连接港口岸电电源给自身负载供电;二是当船舶离港时,靠港船舶需要断开与岸电电源的连接,继续使用船舶自身的发电机电力给用电设备供电[8]。本节主要对船舶靠港和离港时与岸电并离网时负荷转移过程进行仿真研究分析,并验证了虚拟同步机策略在船舶岸电并网时的可行性。
当船舶靠港连接岸电后,经过预同步控制调节岸电逆变器所产生的电压频率、幅值和相位,使其与船舶电网保持一致,当岸电与船电并网运行后,停止船用柴油发电机;当船舶离港时,开启船用柴油发电机,当船上发电系统与岸电的电压、频率和相位一致时,再次使其与岸电并网,然后断开岸电电源。
首先验证预同步控制的可行性。图7为岸电系统与船舶电网的线电压。由图7可知:岸电系统和船舶电网的初相位并不一致,经过预同步控制的调节作用,岸电电源不断追踪船舶电网的相位,在大约0.082 s时基本达到了两者相位、电压幅值和频率的统一,在达到理想的并网操作条件时再进行并网[9],使岸电与船舶并网时的冲击电流最小,使得两者能够平滑过渡。

图7 预同步控制仿真波形
在进行岸电并网操作前,岸电系统没有接入,其输出电流为0。在船舶靠港时,首先操作预同步,假设岸电系统在0.5 s时并网操作已确保完成,然后开始操作负荷转移。
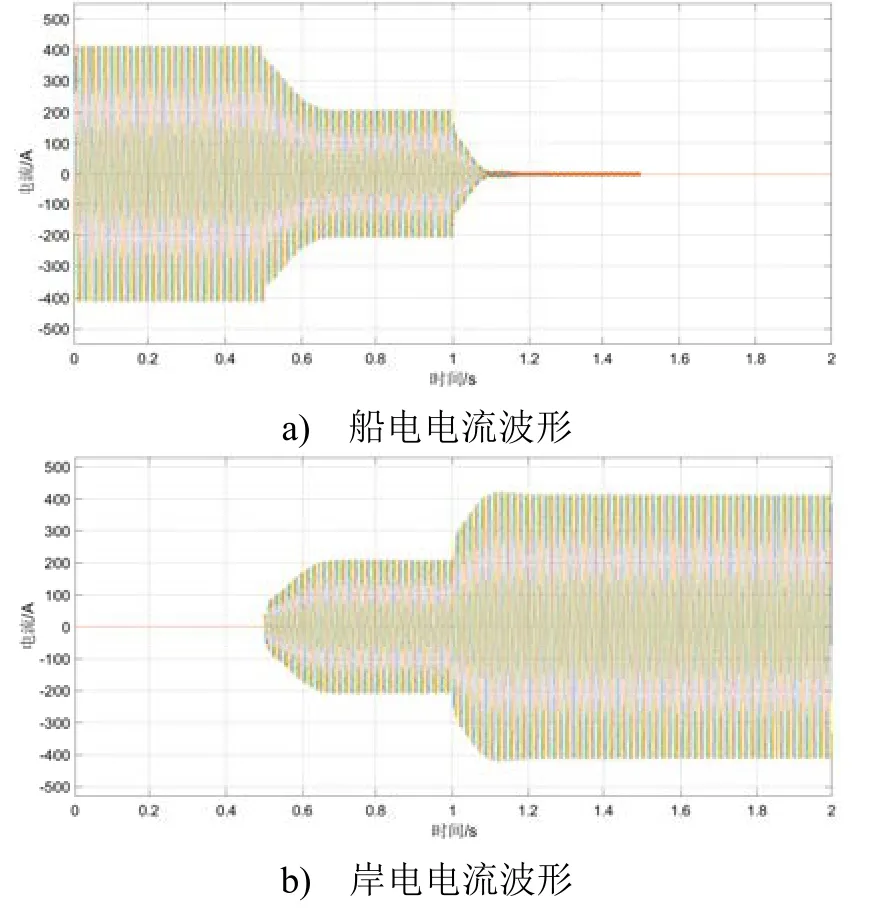
图8 岸电并网时船舶电流和岸电电流波形图
以有功功率为例分析,当船舶在进行负载转移时,从图8a)可以看出在虚拟同步发电机控制系统的作用下,船舶发电机输出的有功功率从0.5 s起逐渐减小,相应地岸电电源输出的有功功率逐渐增大,而总负荷在转移过程中始终保持不变。t=1 s时表示船岸电系统已转移了一半的负载,此时由图可知船舶电网和岸电电源均分负载,分别为100 kW。t=1 s之后,岸电电源所发功率继续逐渐增大,船舶电网的输出功率逐渐减小。由图8b)可知,大约1.5 s时船舶电流已减小至接近0,同时,船舶发电机的输出功率也减小到至接近于0。说明当t=1.5 s已基本由岸电电源给船舶负载供电时,岸电电源与船舶电网已完成了负载转移,此时可将船舶发动机关闭,岸电电源并网过程完成。在这过程中需要注意的是当确保负载能够安全转移的前提下,岸电与船电短时并联运行的时间应控制的尽可能短。当船电与岸电并联时,不停止船上的发电机。当确保并网操作完成时,操作负荷转移,此时将由岸电电源承担为船舶负载供电的任务,负荷转移操作完成后,当柴油发电机的输出功率减小到预定值[10],使船上的发电机并联开关断开,只使用岸上的电源,这个过程实现了岸电的电能替代。

图9 岸电离网时船舶电流和岸电电流波形图
当船舶离港时,进行做相反的船舶离网的操作。同样在虚拟同步发电机控制系统的作用下,岸电电源输出的有功功率从0.5 s起逐渐减小,相应地船舶电网输出的有功功率逐渐增大,而总负荷在转移过程中始终保持不变。当1.5 s时,已基本实现船舶发电机为船舶电网单独供电,岸电离网操作完成,岸电已退出连接。
搭建的船舶岸电的并离网仿真模型验证了虚拟同步机控制策略的可行性,解决了逆变器动态响应过快的问题,使得岸电与船舶之间能够更加平滑并网。
6 结论
本文的主要研究对象为船舶岸电系统,提出了一种基于虚拟同步机技术的船舶岸电并网控制策略。对传统的并网技术进行了改进,在这基础上使得岸电逆变器具备了同步发电机的外特性。通过在M atalb/Simulink平台上对岸电系统的建模仿真,实现了岸电电源的并网控制和船舶的负载转移,使得靠港船舶实现从船电到岸电的无缝切换,同时虚拟同步机的控制策略减小了并网时的冲击电流和并网失败的可能,实现了靠港船舶岸电的电能替代,对港口节能减排的目标有极大的贡献。
