一种基于模糊逻辑的气源定位系统
2020-10-22杨惠,苑毅
杨 惠,苑 毅
(兰州文理学院 连续运行参考站(continuously operating reference stations, CORS),兰州 730000)
0 引言
气源检测和定位技术广泛地应用于工业和日常生活中[1]。通过气源检测和定位技术能够发现有害气体,并对气体源的位置进行定位。随着人工智能技术的发展,移动机器人已能完成一些简单的工作。将气体传感器安装到移动机器人上,并由移动机器人在环境中移动,进而检测气源,并进行定位。
将这种气源定位技术称为动态气源检测技术[2-3]。相比于动态气源检测技术,静态气源检测技术[4]是将气体传感器放置于固定位置。尽管静态 气源检测技术操作简单,软件/硬件不复杂,但它的气源检测范围有限。
相比于静态气源检测技术,移动气源检测技术的应用范围更广。移动气源检测技术通过移动机器人的移动,携带气体传感器检测周围环境的气体。因此,气体传感器的检测范围受移动机器人的移动路线影响。换而言之,机器人的移动路线成为气体检测的关键。在特定空间内,如何使机器人以最少的移动距离实现最大的检测范围成为1 个关键议题。目前,研究人员提出了不同的路线规划算法[5-7]。
文献[8]提出基于昆虫气味跟踪行为的小型气 源定位机器人,该机器人依据昆虫行为设定机器人的移动路线。文献[9]设计了基于无线传感器网络的气体泄漏源定位机器人,该机器人依据Z 字形算法进行移动。同时,引用定位模块,将气源位置信息传输至终端设备,使后台相关管理人员能获取气味源的位置坐标信息。文献[10]依据大鼠嗅觉神经元信号检测气味,并定位气味。文献[11]提出基于无线传感器网络的气源目标搜寻多机器人系统。该系统由多个嗅觉机器人组成,并用机器人相互交换信息,协同检测气源位置。同时,该系统利用浓度梯度和风速信息进行结合,对气源进行间接定位。
此外,机器人的移动轨迹受多个因素影响。因此,引用1 个多输入单输出的决策系统,优化移动轨迹路线。而模糊逻辑系统是1 个不错的选择。例如,文献[12-13]利用模糊逻辑处理传感器所采集的多项信息,并由模糊逻辑依据所采集的信息进行决策。
为此,提出基于模糊逻辑的气源定位系统。该系统气体传感器安装在移动机器人上,通过移动机器人来扩大气体传感器的感测范围,进而增强对气源定位的精度。
1 机器人硬件系统
图 1 显示了机器人系统结构。该系统由以Arduino Mega 2560 为核心的控制模块、距离传感器和气味传感器以及电机马达等主要模块组成。
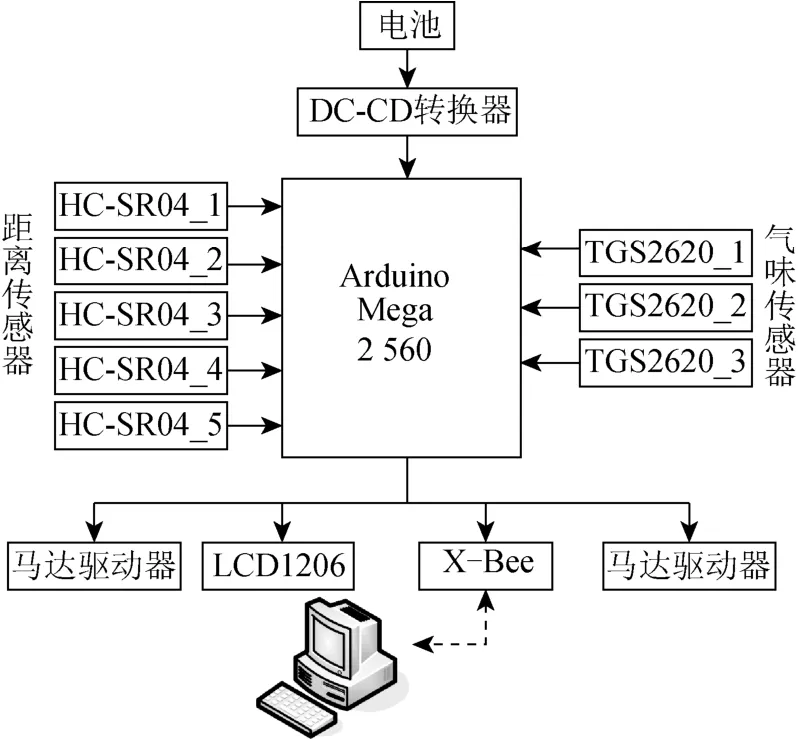
图1 机器人模型
作为主控模块,Arduino Mega2560 的工作电压为5 V,并具有4 路UART 接口。距离传感器和气体传感器分别采用HC-SR04、TGS 2620。其中 TGS 2620 传感器属金属氧化物半导体传感器,能够检测酒精等可燃性气体。当检测到气体浓度增加时,传感器的电导率就增高。图2 显示了TGS 2620 气体传感器信号控制电路。
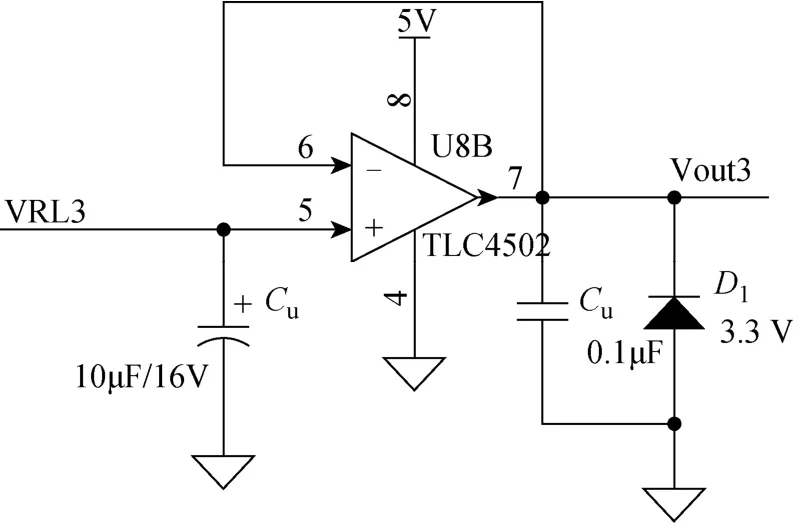
图2 TGS 2620 控制电路
而马达采用基于LMD18200 的直流电机进行驱动。图3 显示了LMD18200 的控制电路[9]。
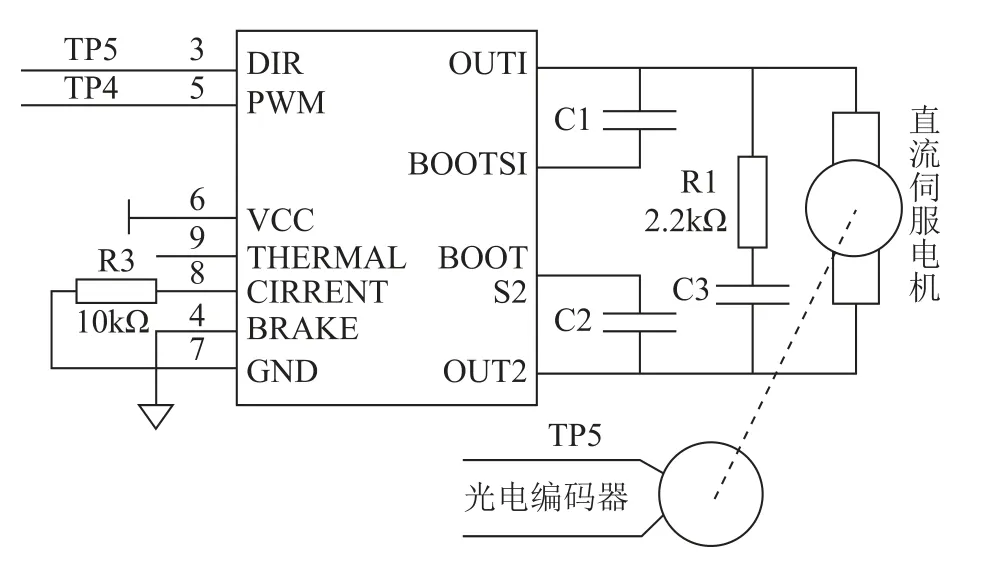
图3 电机驱动控制电路
从功能角度上讲,机器人可分为3 层,第1 层(顶层)放置气体传感器、液晶显示屏(liquid crystal display, LCD)和X-bee 通信模型;第2 层为核心控制模块和距离传感器;第3 层为底层,放置直流马达和驱动器。如图4 所示。
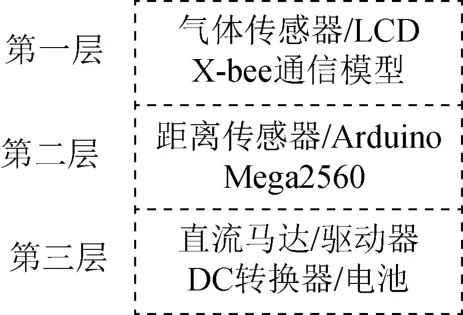
图4 机器人模型
2 模糊逻辑系统
图5 为模糊逻辑系统。将3 个TGS 2620 所感测的气体浓度作为系统输入,再由模糊逻辑系统输出控制马达驱动器的脉冲宽度调制信号。
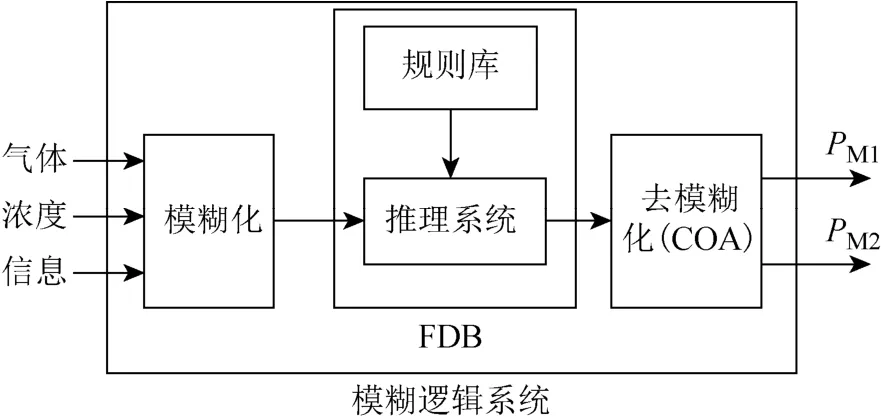
图5 基于模糊逻辑算法模型
将3 个气体传感器所感测的气体浓度分别表示为 rS 、oS 和lS 。它们分别表示右边、中间和左边气体传感器所感测的气体浓度。而M1P 、M2P 分别表示控制左、右马达的脉冲宽度调制(pulse width modulation, PWM)信号。
2.1 模糊表述
首先,引用低(low)、中(medium)、高(high)对TGS 2620 气体所感测的气体浓度进行模糊表述。具体而言,如表1 所示,对所感测的气体浓度进行划分,然后引用慢(slow)、适度(medium)、快(fast)表述输出变量,即如表2 所示,对输出PWM 信号 进行模糊表述。
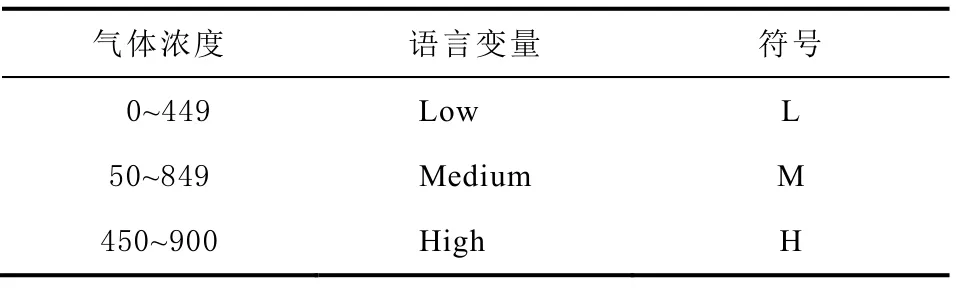
表1 气体传感器的输入
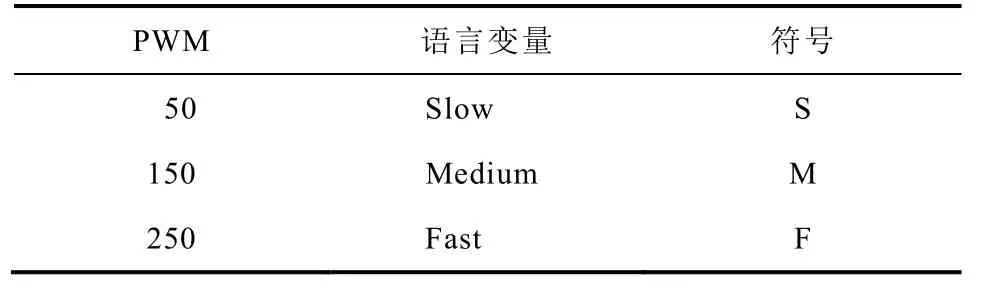
表2 输出变量
2.2 规则库
推理系统依据气体浓度信息,并结合规则库(如表3 所示),输出控制马达驱动器的PWM 信号。PWM是利用微处理器的数字输出来对模拟电路进行控制的1 种非常有效的技术。通过调整PWM 信息,可以驱动马达的行驶速度和行驶方向。最终,机器人依据气体浓度进行移动,进而发现气体源的位置。
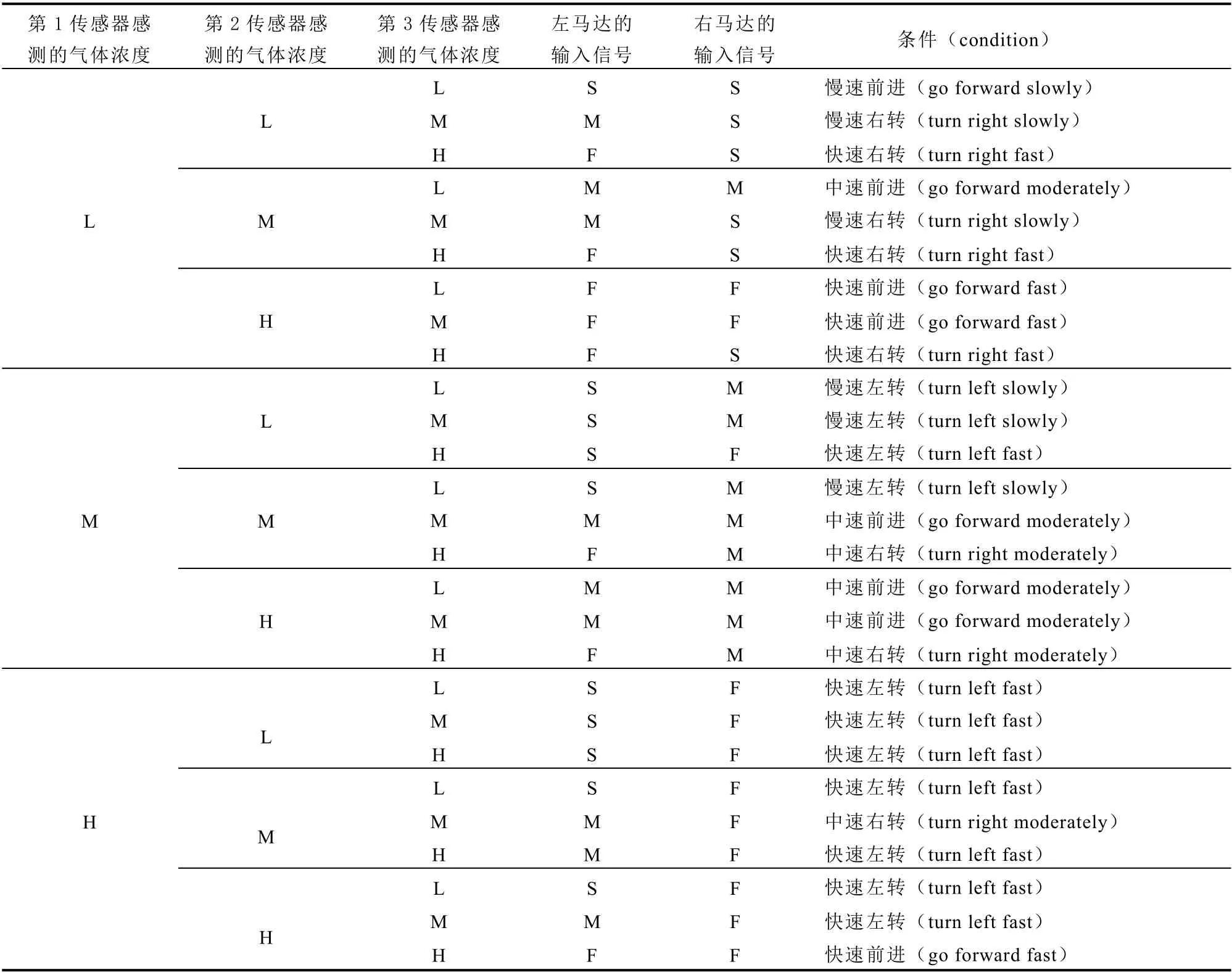
表3 规则库
3 实验结果与分析
3.1 实验环境
考虑单一气体泄漏的实验场景。将气源位置放置于实验场地中心,并在气源后方摆设1 台风扇,由它将气体散开。机器人上的3 个气体传感器监测气体浓度,再驱动机器人移动,如图6 所示。
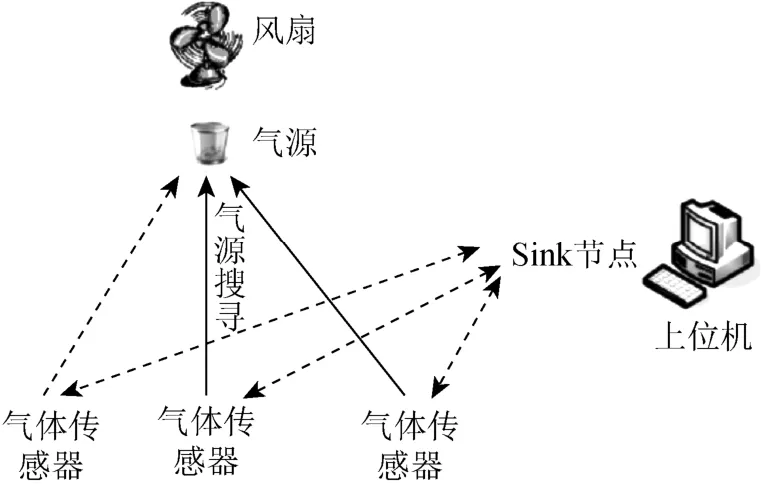
图6 实验原理
在 m m×100 20 的实验室放置气源和机器人,气源的位置为(0, -5 m),机器人的初始位置为 (0.5 m, 100 m)。
3.2 数据分析
采用蒙特卡罗方法进行实验[14]。每次实验独立重复20 次,取平均值作为最终的实验数据。
图7 显示了机器人搜索气源的实验过程。最初进行全局搜索,检测空气中是否有异常气体。当检测到气源后,再进行局部搜索,准确地估计气源位置。
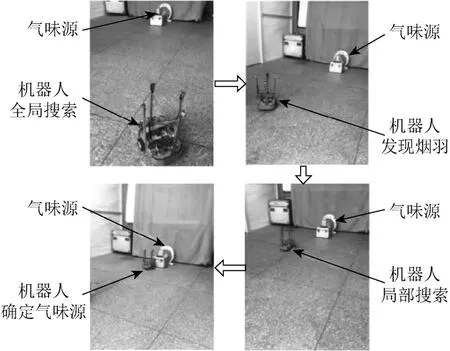
图7 机器人搜索气源的实验过程
图8 显示绘制机器人的移动轨迹。从图8 可知, 最初机器人偏离气源方向较大,但后续发现气源,就快速地靠近气源,进而能准确地估计气源位置。
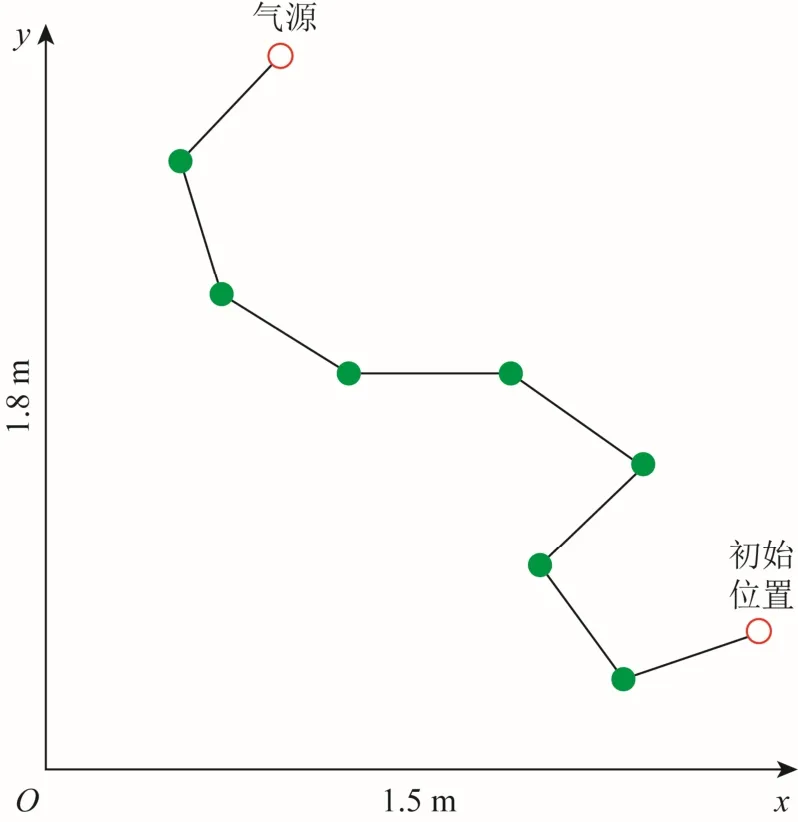
图8 气源搜索路径
图9 显示了3 次实验机器人寻找气源所消耗的时间。这3 次实验机器人所放置的初始位置不同。但从图9 可知,移动机器人寻找气源所消耗的时间相近。这也充分说明,移动机器人能够快速地寻找气源,也具有一定的强健性。

图9 寻找气体源所消耗的时间
4 结束语
针对有害气源定位问题,提出基于模糊逻辑的气源定位系统。该系统利用移动机器人移动的便捷性,将TGS 2620 气体传感器安装到机器人上,并由TGS 2620 气体传感器采集环境数据,然后将这些数据作为模糊逻辑系统的输入,再由这些模糊逻辑系统决策机器人的移动路线,进而能快速地搜索气源的位置。实验数据证实了该系统的有效性。