拉索检测机器人检测架结构设计
2020-10-21赵淑娟
摘 要:拉索大桥的缆索服役于大气之中,需由检测机器人背负相应检测设备,在具有一定挠度、高度、长度的缆索上定期检测其安全性。本文主要从轻便性、简便性和经济性等诸多因素考虑,对检测机器人的检测架进行设计,使检测机器人在背负设备实施作业时与拉索之间既具有有较大的附着力,又易于夹装不同直径的缆索。
关键词:检测机器人;夹持机构;气囊棒
斜拉桥缆索服役于室外环境之中,其所受到的来自于大气的锈蚀等迫害也是非常严重,直接影响其使用安全和形象。对缆索等室外服役的高度、斜度、挠度特殊对象的检测机器人需要背负一定的设备在缆索上运行和停留,进行检测并反馈信息。机器人在实施检测作业中,要克服本身和所背负设备的重量,设计出具有灵活的夹装适应性、结构简单、稳固性强的机器人检测架就变得尤为重要。
一、机器人检测架的设计要求
由于机器人在高空作业过程中要承受外界力、缆索自身挠度等因素的影响,难免会偏离预定轨迹或者颠簸爬行,这是我们都不希望发生的。要得到比较好的检测效果,不误检、漏检,机器人运动的平稳性要求非常高。机器人检测架设计需要解决如何实现全方位检测、如何保证顺利通过缆索接口、如何确保检测中的稳定、如何保证适应多规格缆索的检测等一系列问题,确保检测机器人能在缆索上稳定的上行、下行和停留。
二、机器人检测架的结构设计
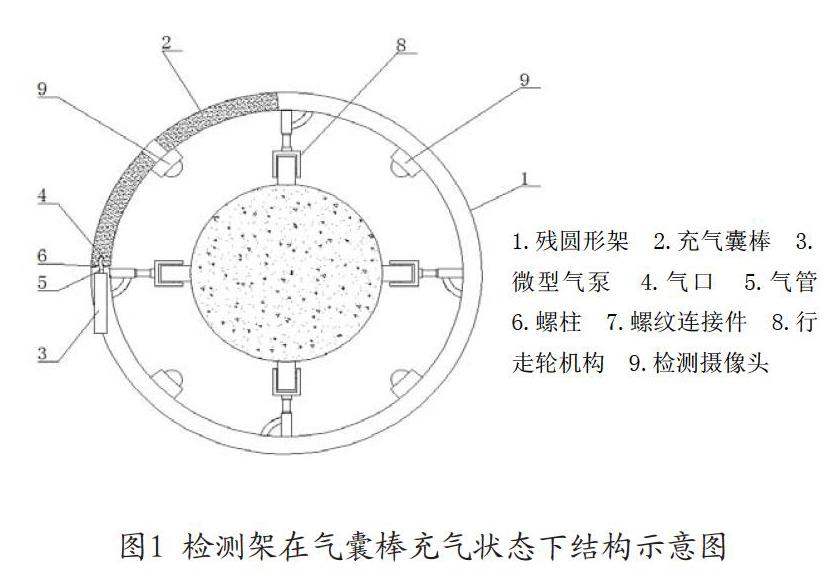
根据上述设计思想与设计要求,对检测机器人检测架机构进行了设计。检测架的主体结构包括残圆形架、充气囊棒、微型气泵、气口、气管、螺柱、螺纹连接件、行走轮机构等主要部件,如图1所示。
1.残圆形架
残圆形架为圆心角为N度的圆弧架体,和被检测对象的直径等相关因素有关。经过反复试验,确定N的一个最佳的取值范围在280度到300度之间。如果N小于280度就不能够实现四个行走轮机构的环形阵列;如果N大于300度,为了保证通口两端的直线距离必须小于缆索的直径,就必须通过增大残圆形架直径的方式去实现,这样一来就会增大装置自重。
2.充气囊棒
充气囊棒为圆心角为n度的圆弧囊棒,N+n=360度。充气囊棒所在圆的直径等于残圆形架所在圆的直径,与残圆支架构成一个完整的圆形结构,n的取值范围在60度到80度之间。在充气囊棒释放变瘪而自然下垂预留出的通口能有效通过缆索接口,在检测开始时将本装置顺利安置到缆索上。这个通口两端的直线距离必须大于缆索的直径,不然的话就不能在检测开始时将本装置安置到缆索上。
3.微型气泵、气口及气管
充气囊棒一端与残圆形架一端连接。充气囊棒上设有气口,微型气泵设置在残圆形架上,微型气泵通过气管与气口密封连接。
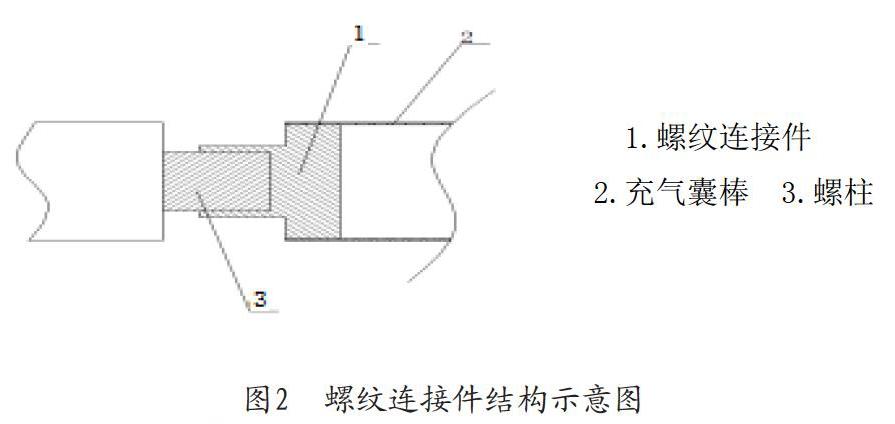
4.螺柱、螺纹连接件
为了实现残圆形架、充气囊棒之间的可拆卸连接,便于更换坏掉的充气囊棒,残圆形架一端设有螺柱,充气囊棒一端设置与螺柱螺纹连接的螺纹连接件。螺纹连接件的结构如图2所示。
5.行走轮机构
在残圆形架和气囊棒所构成的圆形支架上,按照均匀分布的阵列设置四个行走轮机构。行走机构弹簧拉力紧固在残圆形支架上,对残圆有一定的反作用力,气囊棒不适合于受到太大的压力,这也是试验出残圆的圆形角度最小应该在280度的原因。
6.检测摄像头
四个微型检测摄像头也做等分布列,每个摄像头在两个行走轮机构的中间位置。其中三个位于残圆形架上,一个检测摄像头粘附在充气囊棒上。充气囊棒通过微型气泵充气后即可与残圆形架一起构成圆形,充气囊棒上的检测摄像头能够进行对应处的检测。
三、检测架的工作原理
机器人用检测架在残圆形架阵列设置四个行走轮机构和四个微型检测摄像头。当气囊棒充气后,可再与残圆形架一起构成圆形,在行走机构的带动下,检测架以及所背负设备在缆索表面攀爬、停留、后退进行作业,检测摄像头对应处进行检测。借助一定的通信手段,可以將所检测到的信息反馈给相关设备及人员进行分析。当检测作业结束时,充气囊棒通过微型气泵放气,充气囊棒变瘪而自然下垂预留出通口,从而可以较为方便的将检测架从缆索拆除。
本文所阐述的机器人检测架,具有结构更加简单,制作成本减低,更便于夹装和摘取的优点。随着试验的不断进行发现,充气囊棒质量比残圆形架的质量轻很多。当气囊棒充气实现检测机器人整个检测架构件在斜拉索上运行时,需要保持充气囊棒在下方才能保证较稳定的提速检测。如果充气囊棒在上方时,由于较重的残圆形架在下方,会造成下方的重量远大于上方,这就会在提速检测时由于重力的作用有脱缆的危险。所以,需要进一步将整个检测架结构作出进一步的细化改进,保证检测架的重量分配更加均匀,能够并保持任何状态下的稳定提速。
作者简介:
赵淑娟(1973-),女(汉族),重庆工业职业技术学院,教授。主要研究方向:电气自动化及机电一体化技术。
