光刻机工件台定位平台结构设计
2020-10-21叶圣义徐世福桑锦凯
叶圣义 徐世福 桑锦凯

摘要:针对光刻机工件台易受到微小震动而引起图像偏差的问题,对工件台定位平台的结构进行了优化设计,同时改进了工作台的调节方式,对今后光刻机工件台的研究与改进具有良好的借鉴意义。
关键词:光刻机;定位台;三轴联动
0 引言
本文针对光刻机自动修改定位存在误差的问题,以光刻机工件台定位平台为研究对象,以接触式光刻理论、1:1全反射投影光刻技术、反射投影技术、电子光刻技术等作为理论与技术支撑,在此基础上完成了光刻机工件台定位平台的结构设计。结合测量反馈系统,本设计主要完成了对光刻机普通定位平台的优化,优化部件及定位部件的设计、组装;文件格式的转换和零件与定位部件实体逻辑位置的装配。同时从精度、运动方式等方面,将本文设计的光刻机工件台定位平台与市面上成熟的产品进行比较,完成了定位平台的结构三维图设计。
1 基本理论
根据对各定位理论的归纳与了解可知,光刻机定位精度取决于光刻机中的像差和层之间的配准精度,基于此,本设计根据要求改善了定位部件的设计、组装以及零件与定位部件的装配,完成了定位平台的三维结构设计以及六自由度平台结构设计,再通过计算机图形技术和3D仿真设计、3D仿真平台,得到定位部件的最优设计方案。
2 定位平台的三维结构设计
2.1 定位平台的“331”原则
2.1.1 “331”原则
“33l”原则内容如下:(1)設置三维测量系统的X、Y、Z轴标准尺寸线或其延长线相互垂直并相交于一交点上,以这三轴测量线为基准建立三维坐标系。(2)设置测量系统中测量平台的X轴导轨导向面、Y轴导轨导向面与X、Y轴标准尺寸线所构成的测量面重合,从而建立两个运动面与一个测量面这三面共面的测量平台。(3)设置测头中心点与三条标准尺寸线或其延长线的交点重合。完成上述工作后,锁定三轴标尺与测头的相对位置,建立三维测量系统。
2.1.2 总体结构设计方案
定位平台整体结构布局示意图如图1所示,设置X轴驱动系统和X向测量系统与X向工作台固定,Y轴驱动系统和Y向测量系统与Y向工作台固定,并通过Y向导轨与X向工作台连接,Z向工作台通过Z向导轨与Y向工作台连接,且Z向工作台与水平面相互垂直。测量和定位由激光测量系统执行。基站和Y向驱动系统都固定连接到X向工作台,同时基础平台还需要设置能测量位移的激光器,并且Z向工作台需要具有与激光器连接的反射目标镜。三维定位平台的部件包括框架系统、导轨、平衡部分、驱动系统和激光干涉仪系统。
2.2 定位工作台的详细结构设计
基于设计和结构要求,对定位工作台三维结构进行设计。方案设计流程如下:
2.2.1 Z向定位工作台设计
从结构设计的角度来看,有必要采取措施确保引导线、测量线和驱动线在同一方向上。通过设定驱动框架和电动框架的精度,可以确保引导线和驱动线的方向一致。通过调节Z向目标透镜的调整机构,可以确保引导线和测量线对准,以此实现Z向定位台的并联设计。
2.2.2 三维定位工作台的结构优化设计
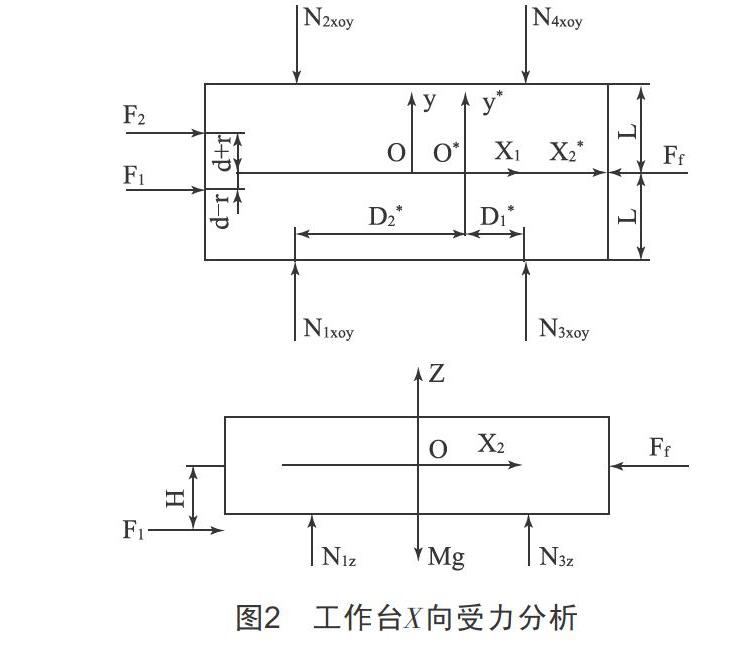
本设计利用“331”原则设计并优化了定位平台的基本结构,通过同步电机偏心安装、磁流变液阻尼器和配重设计、工作台结构参数优化设计,实现了电机驱动时定子和转子的相对径向位移不超过0.1 mm、工作台平稳移动和驱动电机负载稳定的目的。图2为工作台X向受力分析示意图。
3 六自由度平台结构设计
3.1 六自由度平台机构概述
六自由度平台主要由上下平台、电动缸和铰链组成。伺服电动缸通过铰链以并联的形式将固定底座和运动平台连接起来,因而6个伺服电动缸均可独立伸缩。通过6个伺服电动缸的协调伸缩,相对于固定的下平台,运动上平台就可以灵活实现空间6个自由度方向上的位姿运动。
为了获得六自由度平台的空间位置关系,首先建立动态坐标系以及静态坐标系,即Ob-XbYbZb和Op-XpYpZp,选择系统的质心作为坐标系的原点,并且坐标轴的方向平行于平台的惯性主轴方向。
3.2 平台结构参数和技术要求
六自由度平台的上下平台均为不等六边形,有6个相同的支撑杆,其长度可单独调节,通过上下平台之间的万向节连接。该机构的结构参数为上平台外接圆r=0.5 m,下平台外接圆r=1.25 m,六边形短边对角30°,六边形长边对角90°。
4 结语
本设计通过运用多个软件,以光刻机定位平台为对象,完成了对定位平台的设计、建模和仿真(由于篇幅有限,没有展开论述),并结合“331”原则建立了三维平台的结构基础,通过设定驱动框架和电动框架的精度,完成了Z轴升降平台的设计,实现了电机驱动时定子和转子的相对径向位移不超过0.1 mm、工作台平稳移动和驱动电机负载稳定的目的。
本设计还通过改进工作台调节方式,先由三轴联动进行粗调,再由高精度六自由度平台进行微调,完成了光刻机工作台的结构优化与整体方案设计,对今后光刻机工件台结构的研究与改进具有重大意义。
[参考文献]
[1] 成荣,王希远,朱煜,等.基于有限元方法的光刻机工件台线管组件结构优化[J].清华大学学报(自然科学版),2017,57(8):798-802.
[2] 宋跃,张常江,强盛,等.光刻机工件台自转电机控制系统设计[J].自动化技术与应用,2016,35(9):20-23.
[3] 娄建鹏.α光刻样机工件台系统的动态特性分析[D].哈尔滨:哈尔滨工业大学,2014.
[4] 胡金春,高阵雨,成荣,等.光刻机工件台六自由度超精密位移测量研究[J].中国基础科学,2013,15(4):17-20.
[5] 万勇利,韩记晓,魏凯,等.光刻机双工件台控制系统任务调度设计[J].自动化技术与应用,2016,35(7):129-134.
收稿日期:2020-03-01
作者简介:叶圣义(1998—),男,江苏人,研究方向:机械设计。
