基于Simulink的V2X硬件在环测试系统研究
2020-10-21蔡之骏张莹杨波冯其高李晓平
蔡之骏 张莹 杨波 冯其高 李晓平


摘 要:V2X(Vehicle-to-Everything)技术的国际标准和国内标准已相继出台,相关的测试需求也越来越迫切。文章提出一种基于Simulink的V2X硬件在环仿真测试系统方案,该方案中V2X设备通过CAN信号与仿真模型和车机显示屏交互,从而模拟真实的V2X设备实车前装工作环境;同时,本方案中的测试系统还使用GNSS模拟器发送实时定位数据以模拟真实GPS信号衰减。该方案能快速完成大量V2X算法场景测试及验证,有效缩短测试和开发周期,并能通过简单地加入驾驶模拟器即可支持V2X驾驶员在环(DIL)仿真测试。
关键词:V2X;硬件在环仿真;驾驶员在环仿真;Simulink
Abstract: As the national and international standards for V2X (Vehicle-to-Everything) technology been published in recent years, there are increasing needs to find ways to test V2X products effectively. This paper suggests a method to build V2X HIL (Hardware-in-the-Loop) test system based on Simulink models. In the system, the V2X equipment communicates with vehicle models and vehicle HMI screen to simulate the real environment for factory-installed V2X products; meanwhile, the system also employs GNSS simulator to send real-time position signals so that the GPS signal attenuation can be simulated. The system can complete lots of V2X algorithm scenario tests and verifications rapidly, reducing the test and develop periods significantly. Moreover, the system is able to do V2X DIL (Driver-in-the-Loop) tests by simply including the driving simulator.
Keywords: V2X; HIL; DIL; Simulink
前言
V2X[1](Vehicle-to-Everything)技术通过将“车-人-路-云”等交通要素有机地结合起来,能有效构建智慧交通体系,并使车辆获取比单车感知更多的信息。随着V2X国际和国内标准的出台与推行,V2X设备的开发与应用已经在各大厂商内纷纷展开,相关的V2X测试需求也与日俱增。传统的V2X应用测试使用实车测试,需要多台实车搭载相应的V2X设备去实际场景行驶。实车测试效果真实,但非常耗时,且受路况与车况的限制,而V2X硬件在环仿真可以很好地提升测试效率,并且由于仿真的车辆行驶轨迹是在仿真软件模型中搭建,所以不受路况与车况的限制。因此,搭建V2X硬件在环测试平台的重要性也与日俱增。
本文提出一种基于Simulink模型的V2X硬件在环仿真方案,能够模拟真实的V2X设备前装工作环境;在该方案中,测试者可在模型中预设车辆行驶轨迹与车辆动作,从而高效搭建多个V2X复杂场景,并实现自动化测试。主车V2X设备接受的GPS信号为GNSS信号模拟器发出的模拟GPS信号,从而仿真真实的GPS环境;主车与远车V2X设备通过V2X信号互相通信,并通过CAN信号接受来自模型的自身车辆动力学参数,同时主车设备通过CAN信号向车机显示屏发送预警信息,这些都与V2X设备前装方案的真实工作环境一致(实际的V2X实车前装方案中,V2X设备通过CAN总线获取本车动力学参数,并通过CAN总线向实车显示屏发送预警信号)。
由于时间同步信号(1PPS信号)可直接通过解析对应的GPS信号获取,因此本方案中,GNSS模拟器会向V2X设备广播同样的GPS信号,从而保证所有被测的V2X设备时间同步。注意到远车设备不采用GNSS模拟器的定位信号,因此远车设备内部软件算法屏蔽来自GNSS模拟器的定位信息但依然使用来自GNSS模拟器的1pps信号,从而保证远车与主车的时间同步而定位來源不同。此外,本方案还可支持无缝切换成驾驶员在环测试模式,只需在系统中引入驾驶模拟器并配置对应的模型即可。
1 测试系统组成
1.1 系统架构
如图1所示,测试系统由上位机、CAN通信设备(CA -Noe)、GNSS模拟器和V2X盒子(LTE-V盒子)组成,并可外接驾驶模拟器实现驾驶员在环(DIL)仿真。其中,上位机使用车辆仿真软件PreScan在Simulink中搭建车辆模型与场景模型,模拟发送实时车辆数据至CAN通信设备,CANoe将车辆实时数据转换为CAN信号格式发送给基于LTE-V通信的V2X盒子。两个LTE-V盒子一个作为主车触发并反馈预警信息,另一个作为远车(或路侧单元RSU),与主车配合测试预警场景,两者通过PC5接口通信。作为主车的LTE-V盒子接受来自GNSS模拟器发送的模拟GPS信号以仿真实车环境下的GPS环境,远车盒子直接通过CAN信号获取Simulink模型模拟的实时GPS信号。
主车盒子与远车盒子均通过解析GNSS模拟器广播的定位信息获取1PPS信号从而达到时间同步;同时,系统所用V2X设备均从CANoe获取车辆速度、加速度、航向角、方向盘转角等实时车辆数据(CAN信号)。系统可添加额外的LTE-V盒子作为远车或RSU进行复杂场景模拟,作为RSU的LTE-V盒子无需接受CAN信号,直接广播自身内部的RSU消息即可。主车盒子计算的实时预警信息通过CAN总线发送给车机显示屏,以仿真真实的预警环境。此外,本方案还能通过外接图中所示的驾驶模拟器支持无缝切换成驾驶员在环测试模式。
1.2 硬件设备
本文V2X硬件在环测试系统所用硬件设备如下:
1)上位机一台,Windows系统,用于运行PreScan和Simulink联合仿真模型;
2)CANoe设备至少两个,用于将模型中的车辆实时数据通过CAN报文的方式发送给LTE-V盒子;
3)V2X设备(图中的LTE-V盒子)至少两台,可增加;为了对应V2X国标,实际台架中使用LTE-V通信方式,作为硬件在环测试系统中的黑盒设备;两个LTE-V盒子中,一个作为主车,其余的作为远车或路边设施(RSU),通过PC5接口互相通信,模拟真实预警场景;
4)GNSS模拟器,通过网线接受上位机发送的模拟主车定位信息,并将定位数据转换成模拟GPS信号进行广播,以此仿真真实的GPS环境,包括卫星信号的衰减、障碍物遮挡等等; GNSS模拟器广播的GPS信号包含1PPS信号,可直接被V2X相关模组解析,从而使远车与主车时间同步;
5)车机显示屏,用于接收并显示主车设备发送的预警信号;
6)各类所需线束若干。
2 Simulink模型
本文所用V2X硬件在环仿真测试系统中,Simulink模型主要包含PreScan自动生成的车辆场景模型、驾驶模拟器控制模块(可选)和在Simulink中手动添加的其他功能模块。 Simulink模型中可加载自动化测试脚本,使模型自动完成多个预设场景测试,从而大幅提升测试效率。
2.1 车辆场景模型
如图2,车辆动场景模型采用PreScan生成的车辆轨迹模块、车道保持模块和车辆动力学模块。其中,车辆轨迹模块对应在PreScan中预设的场景道路和地图,可以从外部通过标准地图数据格式导入;车道保持模块用于初始化车辆动力学参数并保证车辆按预设轨迹行驶;车辆动力学模块接受车道保持模块生成的动力学参数,根据所选的车辆动力学模型计算得到车辆当前的动力学参数,这些参数通过CAN通信模块转换为CAN信号传输给LTE-V盒子。
2.2 驾驶模拟器控制模块
如图5,驾驶模拟器控制模块为PreScan自动生成。该模块为可选模块,负责将驾驶模拟器的输入信号传给Simu -link中的主车从而实现驾驶员在环仿真测试,使用该模块时需要将主车的车道保持模块替换为该模块。
2.3 CAN通信模块
如图6,CAN通信模块为手动添加的Simulink模块,将接受的车辆动力学参数和定位信息按该模块读取的对应dbc文件格式转换成相应格式的CAN信号,配置相应的CAN通道,通过usb线发送给CANoe设备。
2.4 GNSS模块
如图7,GNSS模块为手动添加的Simulink模块,使用S-function结合GNSS模拟器远程指令实写成,用于将模块生成的主车坐标转转换为经纬高,通过网线实时发送给V2X硬件在环系统中的GNSS模拟器,以此保证GNSS模拟器广播的定位信息与Simulink模型同步。
3 测试流程
本文所述V2X台架仿真测试流程包括HIL测试流程及DIL测试流程;测试结果根据预警算法的不同采用不同的处理方式,可以实时监控算法过程中的各个参数和变量从而得到统计结果图,用于验证算法的可靠性及效率。
3.1 V2X硬件在环测试流程
本文所用系统可通过切换Simulink模块进行V2X驾驶员在环测试,流程如上。
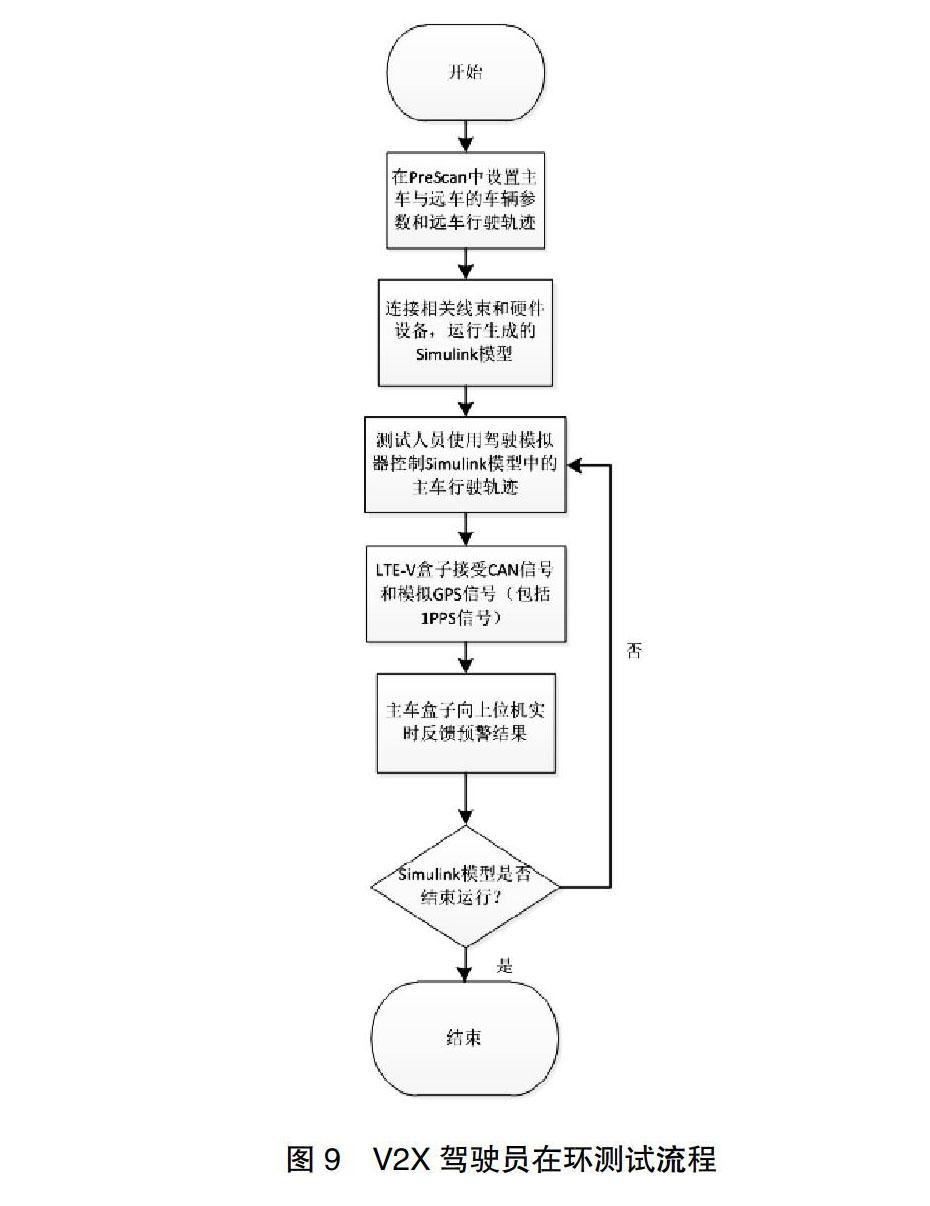
3.2 V2X驾驶员在环测试流程
本文所用系统可通过切换Simulink模块进行V2X驾驶员在环测试,流程如下:
4 测试结果分析
本文所述HIL及DIL台架仿真测试结果包含GUI显示内容以及自定义算法参数检测,Simulink模型可将各个时间点对应的算法参数及变量(碰撞预警时间、预警距离等)记录下来进行结果分析,从而验证算法的可靠性与准确性;测试系统可自定义测试输出结果,以满足各种V2X预警算法的测试结果需求。
其中,Simulink模型中可加载自动化测试脚本,使模型自动完成多个预设场景测试,从而大幅提升测试效率。
5 结论
本文提出一种基于Simulink模型的V2X硬件在环仿真测试方案。该方案模拟真实的V2X前装工作环境和GPS环境,能通过自动化脚本高效地完成大量的V2X算法场景测试与验证,同时还能通过简单地加载驾驶模拟器切换成驾驶员在环仿真测试系统方案。
参考文献
[1] IMT-2020(5G)推进组.C-V2X白皮书,2018-06:2-3.
[2] 张春洲,石晶.基于ADAS实验平台的自动泊车系统研究[J].汽车实用技术, 2019(16):41-42.
[3] 许广吉,石晶.ADAS 实验平台硬件在环仿真[J].汽车实用技术, 2019(09):42-43.
[4] 吳利军,刘昭度,何玮.汽车 ACC 跟随控制策略研究[J].汽车工程, 2005,27(5):514-515.
[5] 齐鲲鹏,隆武强,陈雷.硬件在环仿真在汽车控制系统开发中的应用及关键技术[J].内燃机,2006(5):178- 179.
[6] 周荣宽,韩晓东,王秀锐,等.一种汽车硬件在环仿真测试系统和测 试方法:中国,201410315424.7[P].2014- 07- 04.
