一种基于大型货车视野盲区的层叠式预警系统
2020-10-21李磊磊冯朝阳杨文科
李磊磊 冯朝阳 杨文科


摘 要:因内轮差现象导致驾驶员右转存在视线盲区而引发交通事故的案例层出不穷,研究设计并开发了一套根据大型货车速度和转弯角度以及危险区域外障碍物的移动来实现以探测器定向探测及光线投射为特点,并向司机端进行声音报警,且地面危险区域可调的层叠式预警系统。开展此研究可在大型商用车于弯道转弯时,提醒行人或其他小型乘用车注意避让,对降低事故发生率,减少人员伤亡有积极作用。
关键词:内轮差;激光投影;交通安全
Abstract: Due to the inner difference phenomenon caused by the driver turn right eye blind area and frequent traffic accidents, research design and develop a set of according to the large truck speed and turning angle of danger outside obstacles and movement to achive to probe the directional detection and projection of light, and voice alarm to the drivers side, and adjustable cascading two ground dangerous area warning system. Carrying out this research can remind pedestrians or other small passenger vehicles to pay attention to avoid when large commercial vehicles turn on the curve, which has a positive effect on reducing the accident rate and reducing casualties.
Keywords: Inner wheel difference; Laser projection; Traffic safety
前言
根據中国国家统计局数据显示,截至2018年底,载货汽车保有量占汽车总保有量的22.11%,而货车引起的责任事故更是占汽车责任事故总量的30.5%,其中因为内轮差所导致的交通事故约占17.1%,造成的伤亡人数占货车责任事故总量的27.81%,因此货车因内轮差所导致的伤亡人数占比明显高于其责任事故起数占比。内轮差是指车辆转弯时内前轮转弯半径与内后轮转弯半径之差,由于内轮差的存在,会导致车辆转弯时前后车轮的运动轨迹产生不重合的现象。因此针对内轮差,本研究设计了基于大型货车速度和转弯角度以及危险区域外障碍物的移动来实现以探测器定向探测及光线投射为特点,并向司机端进行声音报警,且地面危险区域可调的层叠式预警系统,可有效解决内轮差导致的货车安全问题。
1 内轮差模型的建立
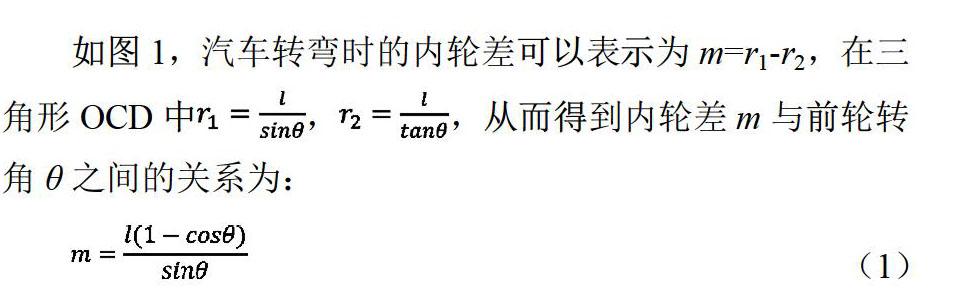
如图1,汽车转弯时的内轮差可以表示为m=r1-r2,在三角形OCD中,,从而得到内轮差m与前轮转角θ之间的关系为:
图中:l为后轮轴距,d为车轮横向轮距;OD长r1;OC长r2;汽车前轮转角θ的范围为0°< θ <60°。
2 转角模型的建立
3 装置模块的设计
装置模块的设计 根据转角模型参数,首先要建立前轮转角与步进机上的遮光板移动距离的关系。因为汽车转弯后即回正,前轮转角的变化范围从0°变化到最大值再到0°,内轮差的范围也由最小值到最大值,最终为零。而与步进电机相连接的遮光板的移动距离也随之动态变化,因此需要建立这三者之间的数学模型。根据转向系统基于阿克曼几何理论曲线设计来保证转向时的运动轨迹符合瞬时旋转中心交叉于一点。由图1可知:
其中:K是两主销中心距,L是轴距,i是转向比,a+β是车前轮转向角度之和,θ是转向盘转角。
因此当车辆的转向比的范围确定后,前轮转角和方向盘转角呈线性关系,不同车型的转向传动比的范围是不同的,大货车的转向转向传动比在14:1和35:1之间。在此以大货车作为研究对象,根据转向角度传感器采集的方向盘转角θ的参数变化,基于阿克曼几何理论曲线可以得到前轮转角的变化范围,由此,通过转向盘转角的变化控制车轮转向范围,再由转向盘连动步进电机遮光板的位移,确定危险区域的范围。[1]
4 技术模块的设计
(1)主控模块:Freescal K60单片机
K60单片机在整个预警系统中作为一个终端机,利用其实时数据处理能力和控制功能,对转向角度传感器输出的信号进行实时的检测和写入。同时,在转向传感器信号写入时,给步进电机驱动信号,使步进电机驱动遮光板进行移动,使整个预警系统开始工作。
(2)汽车转向角度传感模块:转向角度传感器
汽车转向角度传感器,如图5,用以测定转向盘的转动角度和转向方向,在此以转向盘转向角度传感器作为转向信号监测和采集的主要部件。转向角度传感器时刻采集方向盘转动的角度变化,将角度信号转化为电信号发送给主控模块,主控模块从而驱动步进电机带动遮光板的移动,使警示系统正常工作。方向盘转角传感器有霍尔效应式、磁阻式、光电式等多种类型,目前汽车多采用磁电阻式角度传感器,因为其具有操作简便,性能稳定,可实现实时监测和非接触式测量等优点。本装置采用测量量程较大的磁电阻式角度传感器。
(3)激光投射模块:高精度伺服舵机和半导体线激光器
利用K60单片机输出的脉宽调制(PWM)控制信号,来控制舵机的转动方向。半导体激光器具有紧凑、稳定、耐用等特点,最主要的是其可作为便捷光源。利用半导体激光器发射激光,形成警示区域。整个激光投射模块由高精度伺服舵机(图6)和半导体线激光器加工组装而成,可根据需要调节投射激光线的长度和粗细。
(4)主动探测模块:毫米波雷达和广角摄像头
如图7, 主动探测模块中由毫米波雷达和广角摄像头组成,障碍物(非机动车辆和行人等)距货车的速度和距离由毫米波雷达实时检测,广角摄像头用于捕捉货车转弯时的路况,采集的信号经 数模转换后发送给K60单片机,K60单片机经过逻辑运算,输出控制信号使预警装置正常工作。
(5)声光报警模块
当车辆转向时,主控模块接收到角度传感模块发出的转向指令后,通过内轮差模型在单片机中计算得到危险区域。通过激光投射模块将所得的危险区域投影至地面,同时激活主动探测模块,危险情况下同时触发声光报警模块发出报警信号[2]。
5 未来研究方向
进一步对装置的可行性进行研究: 由于行人缺乏安全知识,很少知晓大型车辆在右转时内轮差会引发交通事故。故本研究先以在地面上通过激光投射的危险区域警示周边行人及车辆,并在车辆右侧加装了主动探测模塊。当车辆右转时,若行人或机动车辆进入危险区域,主动探测模块便会被激活主动向行人及驾驶员报警。
未来装置趋于智能化:未来预警装置要从灯光颜色、声音分贝、预警效果等多个方面改善驾驶员工作环境。即利用预警装置给司机适宜的外界信息刺激,从而提高驾驶员的驾驶室内的工作标准,即提高人机交互的水平。
对警示灯光的进一步研究:根据交通心理学相关知识,通常人们把红色、黄色、橙色称为暖色调,而同一位置上的不同颜色会使人看到后所产生的距离感不同,一般而言,暖色系及明度大的颜色看上去比较生动突出,叫前进色,相反冷色系和低明亮度颜色看上去比较静止,叫后退色,因此警示灯采用红色等暖色调,使行人能够快速意识到危险,但是有时候暖色灯光会对驾驶人视野起到干扰现象,因此未来需要对警示灯光进一步进行研究,选择可以适应不同路面条件的灯光颜色。
6 结论
开展本系统的研究,可在货车转弯时警示行人和其他车辆来减少事故的发生,对降低或避免人员伤亡和经济损失有重大现实意义。此外,也会减少对遭遇事故家庭带来的创伤、对公司带来的财产损失以及对社会带来影响。因此,本项目市场前景广阔,对社会和经济有重要意义。同时适应性广泛、成本低廉、安全性高,可供物流公司、矿产企业等需要大量货车进行运输的公司或集团使用,并且将减少公司或集团的运输成本,从而提高利润。简而言之,这一层叠式预警系统具有极大的普适性和推广性,极具实际运用价值。
参考文献
[1] 褚正清,刘家保,宋星.货车右转弯内轮差的建模研究[J].河北北方学院学报(自然科学版),2015,31(05):49-52.
[2] 钟策.大型车辆转弯安全警示灯设计研究[D].西南交通大学,2016.
