自动驾驶客车关键技术分析
2020-10-21王龙杰
王龙杰
摘 要:自动驾驶客车是集计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。我公司为了把握先机决定研发自动驾驶客车,文章对该车多传感器融合定位技术、车用无线通信技术(V2X)、智能线控底盘技术等关键技术进行了详细阐述。
关键词:自动驾驶客车;多传感器融合定位技术;车用无线通信技术;智能线控底盘技术
Abstract: The automatic driving bus is the product of the high development of computer science, pattern recognition and intelligent control technology, and it is also an important symbol to measure the scientific research strength and industrial level of a country. It has a broad application prospect in the field of national defense and national economy. In order to grasp the opportunity, our company decided to develop the self driving bus. In this paper, the key technologies such as multi-sensor fusion positioning technology, vehicle wireless communication technology (V2X) and intelligent wire controlled chassis technology are described in detail.
Keywords: Automatic driving bus; Multi-sensor fusion positioning technology; Vehicle wireless communication tech -nology; Intelligent wire control chassis technology
前言
自動驾驶客车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能客车[1]。自动驾驶客车为了实现其自动驾驶的功能需要完成感知定位、决策规划和控制执行等任务,在其感知定位系统、决策规划系统和控制执行系统中至关重要的关键技术是多传感器融合定位技术、车用无线通信技术(V2X)及智能线控底盘技术等,现将其技术要点分析如下。
1 多传感器融合定位技术
1.1 概述
多传感器信息融合是将不同传感器对某一目标或环境特征描述的信息,综合成统一的特征表达信息及其处理的过程[2]。具体来讲就是协调利用多个传感器资源实现多传感器信息融合,通过对各种传感器及其观测信息的合理支配和使用,将各种传感器在空间和时间上的互补与冗余信息依据某种优化准则加以组合,产生对观测环境或对象的一致性解释和描述。
1.2 原理
多传感融合的原理就是得到全球导航卫星系统(GNSS)、惯性导航系统(INS)和特征匹配自定位系统等的输入数据。然后对这些数据进行预处理、数据配准和数据融合等处理后,精准的输出车辆自身的速度、位置和姿态等信息。
1.3 优势
GNSS应用广泛、适用范围广、定位精度高,但其更新频率过低仅有10Hz左右无法满足自动驾驶系统对实时定位的要求。INS更新频率较高,达到200Hz以上,满足自动驾驶系统的需求;但由于误差累积的原因,它的准确度随时间和行驶距离的增加而降低,因此也无法完整保证定位的准确性。通过多传感器信息融合技术将GNSS与INS的数据进行融合,可以为车辆定位提供实时准确的位置信息。
2 车用无线通信技术(V2X)
2.1 概述
车用无线通信技术(V2X)[3]是将车辆与一切事物相连接的新一代信息通信技术,其中V代表车辆,X代表任何与车交互信息的对象,当前X主要包含车、人、交通路侧基础设施和网络。V2X交互的信息模式包括:车与车之间、车与路之间、车与路侧基础设施(如红绿灯、交通摄像头、路侧单元等)之间、车与人之间的交互。
2.2 原理
V2X是一种网状网络,网络中的节点(汽车、智能交通灯等)可以发射、捕获并转发信号。利用V2X,车辆可以获取周围环境的未知参数及附近车辆的运行状态,这些状态包括速度、位置、行驶方向、刹车等基本的安全信息。然后车载端主动安全算法将处理所获取的信息,并按照优先级对信息进行分类,对可能发生的危险情景进行预警,紧急情况下可以利用车辆执行端对车辆进行控制从而规避风险。V2X技术开启了对四周360°智能感知,这一技术能够在各种危险情况下提醒驾驶者,从而大大减少汽车碰撞事故的发生并缓解交通拥堵。
2.3 优势
2.3.1 覆盖面更广
300~500m的通信范围相比十几米的雷达探测范围要远得多,不仅是前方障碍物、身旁和身后的建筑物、车辆都会互相连接,大大拓展了驾驶员的视野范围,驾驶员能获得的信息更多更立体。
2.3.2 有效避免盲区
由于所有物体都接入互联网,每个物体都会有单独的信号显示,因此即便是视野受阻通过实时发送的信号可以显示视野范围内看不到的物体状态,也就降低了盲区出现的概率,从而充分避免了因盲区而导致的潜在危险。
3 智能线控底盘技术
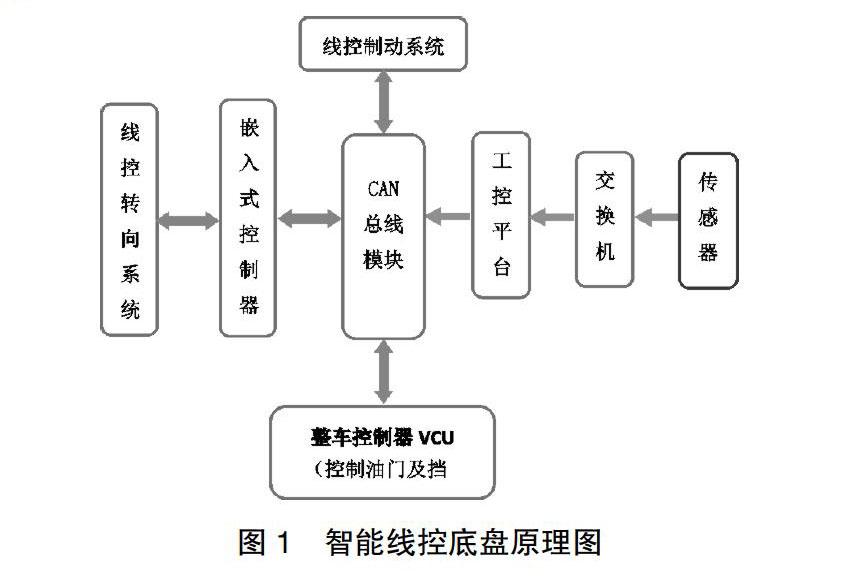
智能线控底盘系统就是将驾驶员的操纵意图经传感器转化为电信号(或环境感知得到的操纵指令),通过CAN总线[4]传输到执行机构并实现精准控制的一种系统。智能线控底盘主要包括四大系统(原理如图1所示):线控转向系统、线控制动系统、线控油门系统和线控换挡系统[5],现分别阐述如下。
3.1 线控转向系统(Steering By Wire ,简称SBW)
3.1.1 概述
线控转向系统取消了转向盘和转向器之间的机械连接,直接通过电信号控制转向电机来控制汽车转向,主要由转向盘总成、转向执行总成和主控制器(ECU)3个主要部分以及自动防故障系统、电源等辅助系统组成。
3.1.2 原理
驾驶员根据路况转动方向盘(或由CAN发送的方向盘转动指令),转向盘转动时带动转角传感器的大齿轮转动,大齿轮带动装有磁体的两个小齿轮转动,产生变化的磁场,通过敏感电机检测这种变化产生的转角信号,通过CAN总线将数据发送出到主控制器,主控制器根据内部的程序,计算出合适的前輪转角并发送到转向执行电机,实现车辆转向。
3.1.3 优势
线控转向系统除了具有一般线控系统安全、轻便、控制精确的优点之外,还可以轻易地通过控制程序实现变传动比控制甚至理想传动比控制,即提高在低速时转向的灵敏性和高速时转向的稳定性,控制汽车的横摆角速度和质心侧偏角,提高转向稳定性。
3.2 线控制动系统(Brake By Wire,简称BBW)
3.2.1 概述
线控制动系统主要由制动踏板、电控单元ECU以及各种传感器等组成,取消了制动踏板和制动器之间的液压(或气压)与机械连接,而是通过传感器接收制动踏板的行程和踏板力,并把信号传递给电控单元,制动意图通过制动踏板转角传感器的转角、角加速度等信号来识别。
3.2.2 原理
当驾驶员踩下制动踏板时(或由CAN总线发送的刹车指令),输入杆会推动阀体移动,位于下方的踏板行程传感器会把踏板行程信息传递给电子控制单元,电子控制单元将踏板行程信息处理之后得到合适的制动力矩,并把制动信号传递给直流无刷电机,电机转动将制动力矩通过二级齿轮单元放大后推动助力器阀体,最终推动制动缸实现制动。
3.2.3 优势
由于取消了制动踏板和制动器之间的液压(或气压)与机械连接,大大减少了制动器起作用的时间,提高了制动效能,缩短了制动距离。由于取消了液压(或气压)控制,不会有液体(或气体)泄漏,减少了保养和维修的成本。
采用线控技术以后刹车响应时间缩短至90ms左右,相对传统液压系统400~600ms、电控液压系统 120-150ms的反应时间优势非常明显。
采用了电控制动系统(EBS)[6],该新技术可以与再生制动等电制动手段结合,满足日常刹车的要求,降低制动系统的磨损,同时也能通过电机的反向作用、弥补刹车踏板在制动能量回收等状态下的力度反馈,让驾驶更为顺畅。
3.3 线控油门系统(Throttle By Wire,简称TBW)
3.3.1 概述
线控油门也称电子油门,主要由加速踏板、加速踏板位置传感器以及电子油门控制单元等组成,加速踏板有地板式和悬挂式两种形式,结合加速踏板位置传感器反映驾驶者的操作意图,并将信号传递给控制单元。
3.3.2 原理
线控油门系统的工作原理是,当驾驶员踩下加速踏板时,驾驶员的操作意图被加速踏板位置传感器感知,转换为相应的电压信号(或由CAN总线发送的目标加速度指令),输送给电子油门控制单元,电子油门控制单元得到这个信号后,结合当前驱动电机的工作状态、车速等信息,通过分析和计算当前驱动电机的最佳扭矩,经过电机控制器控制输出电能的电压、电流幅值或者频率来改变电机转矩,达到控制整车速度、加速度的目的。同时动力电机上的传感器将转速等信息反馈给电子控制单元,实现了闭环控制,从而达到最优的控制效果。
3.3.3 优势
线控油门系统除了控制精度高,结构更为简单之外,可以根据汽车的工况以及驱动电机的工作状态,结合驾驶员的油门踏板深度(或由CAN总线发送的目标加速度指令),实时调节驱动电机扭矩的大小,合理控制输入电能的大小,减少不必要的大油门,提高驱动电机的工作效率。
3.4 线控换挡系统(Shift By Wire,简称SBW)
3.4.1 概述
线控换挡系统由挡位选择模块、电控单元、执行模块、停车控制ECU、停车执行机构和挡位指示灯等组成。
3.4.2 原理
在该系统中,通过挡位按键的传感器将换挡信号传递给电控单元,电控单元处理信号后将指令发送给换挡电机,实现前进挡、倒挡和空挡的切换。其停车控制ECU会根据换挡电控单元发出的换挡指令,控制停车执行机构。
3.4.3 优势
1)消除了传统机械部件与变速器联动的约束,从而提升了设计自由度。
2)换挡齿轮的切换由电机驱动,减少了操纵力。
3)结构简化,减少维护费用,换挡响应快,操控灵敏。
4)当驻车时,只需轻触驻车开关就可实现驻车换挡,操作简捷省时。
4 结论
自动驾驶车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。我公司研发的自动驾驶客车中采用的多传感器融合定位技术、车用无线通信(V2X)技术及智能线控底盘技术等关键技术在国内的自动驾驶领域处于领先地位,在该车试运行后经测试达到了L4级(在特定的条件下不需要驾驶员可以完全完成驾驶任务),我们将总结经验不断提高,相信在推广市场后必将会受到广大客户的欢迎。
参考文献
[1] 360百科.无人驾驶汽车[EB/OL].[2020-01-10].https:// baike.so.com/ doc/6063867-6276926.html.
[2] 王建,徐国艳,陈竞凯,等.无人驾驶技术概论[M].北京:清华大学出版社,2019:100.
[3] 中商产业研究院.2018年中国车用无线通信技术发展前景研究报告[EB/OL].[2018-07-10].http://www.askci.com/news/chanye/2018 0710/1355491125787.shtml.
[4] 赵立军,佟钦智,魏平涛等.电动汽车结构与原理[M].北京:北京大学出版社,2012:149-150.
[5] 陈家瑞,张建文,高莹,等.汽车构造(上册)[M].3版.北京:机械工业出版社,2019:13-15.
[6] GB 7258-2017,机动车运行安全技术条件[S].北京:中国标准出版社,2017:21.
