基于PLC的机械手控制系统设计研究
2020-10-20吴孜
摘要:在自动控制技术不断进步的过程中,现代化程度要求越来越高的技术指标,自动控制领域开始越来越重视以气、液和机电一体的控制装置。本文研究的气动控制机械手就是一个充分结合了电子技术、网络技术、通信技术和计算机技术的综合应用系统。
关键词:PLC控制;气动机械手;系统设计;智能应用
1有关PLC程序设计算法分析
1.1递推法
该方法就是借助于逻辑关系进行层层递推的过程。在进行此次设计的过程中,先是对控制系统中机械手的工作顺序进行标注,并对各个执行状态和动作之间的关系进行理清,之后依靠递推关系,将机械手的工作流程以逻辑图的形式设计出来。关系逻辑对于程序设计具有一定的限制作用,针对这种情况,我们需要反复推敲系统加入程序之后的功能实现以及条件限制。
1.2分治法
利用分治法在此次设计过程中进行模块化设计。主要方法是:先根据工作顺序要求机械手完成相应的功能模块。其次,可以实现左伸-右缩、下伸-上缩、水平伸缩回等,这些小的模块设计中标记为状态符号。最后,通过使用梯形图代替步进指令的方法,并结合具体动作情况完成整个控制功能的实现。
1.3回溯法
使用回溯法也是进行流程图设计的一个重要方法,下面具体介绍了设计思路:在分析过程中针对具体任务进行,并绘制相应的流程图,这样一来思路一旦发生错误就无法实现最大的解决效果。最后再重新回到初始,重新开始设计。需要注意的关键问题:设计过程中返回到何处。
1.4贪婪法
在范围内将所有和条件吻合的情况进行最大化考虑,任意从中选取一个解决方法的方式就是贪婪法。此次设计根据基本思维符合设计要求的思路进行选取,所以在执行过程中需要对每个步骤进行一起一停的操作方式,另外将限制条件加入线圈内,利用基本控制程序实现具体的控制操作。还有一种方法就是使用RST和SET指令来完成整个控制过程。这里常用到的控制方法包括使用提醒程序图代替后续设计图,在过程中把所有出现的动作当成状态。
2气动机械手控制系统设计的研究
2.1顺序功能图
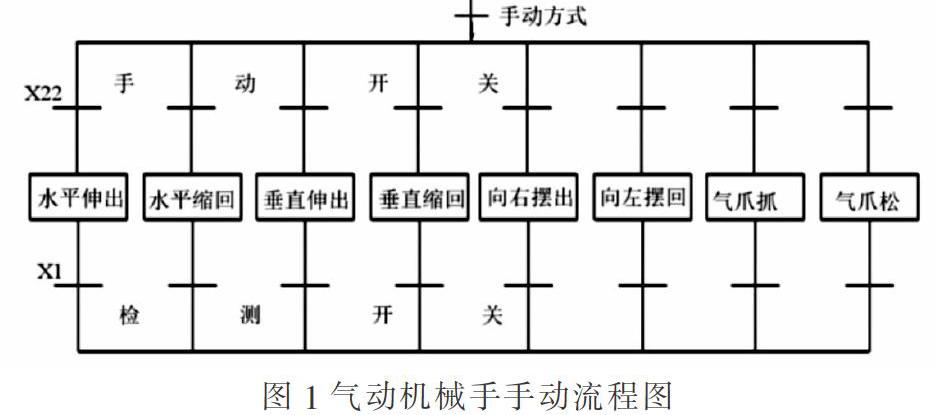
通常,我们主要将顺序功能图应用在执行过程按照先后次序,应用的对象是设计动作来完成生产过程的正常运行时控制系统,按照规定的路线step-step对控制任务进行实现。在进行控制系统设计的过程中经常需要运用该设计方法。该SFC图设计过程中提供了通、专两用的设计元件,是为编程控制系统设计提供辅助的功能图。在当下进行PLC程序设计的过程中大量应用该功能图。根据具体的控制任务,设计过程从原点左侧到右侧依次执行动作任务,根据功能图依次进行左摆摆动缸,伸出垂直气缸,工件吸持,退回垂直气缸,退回水平气缸,右摆摆动缸,伸出水平气缸,伸出垂直气缸,工件放松,退回垂直气缸,退回水平气缸,回归原位。一旦有故障在执行过程中出现,比如停电、执行错误等意外情况,就要转换为手动控制方式,所以需要进行手动控制设置,图1展示了具体的操作流程。在切换为手动操作以后,X22开关会进行闭合,并进行水平伸出操作。当传感器完成检测任务以后会将控制指令直接发出,此时开启的X1不再伸出。其他工作任务类似于该工作过程,工作过程大致为水平缩回,垂直伸出,向右摆出,垂直缩回,气爪抓紧,向左摆回,气爪松开。
2.2气动机械手总体SFC图
当X11,12,13,14,15,16,17,20,21,22,23同时存在并且处于开启状态的只有一个的时候,此时就要用到转换开关,使用转换开关的目的就是为了实现单一性的控制方式。通过这种方式能够降低危险以及错误发生的概率。自动切换开关X10处于开启状态时,系统处于手动控制状态,当X10为关闭状态的时候,此时系统处于自动控制状态。方式开关是决定系统原始状态是自动还是手动控制的关键。如果我们切换为自动控制以后,机械手并没有回到初始位置,我们就要进行以下操作:通过手动方式将机械手回归原位,然后在开始进行自动控制。当控制系统完成一个控制周期以后,工作选择开关会对全自动还是单周期自动操作进行选择。
3分析PLC控制系統梯形图程序
3.1手动梯形图程序
手动操作过程就需要使用手动梯形程序,它的工作状态是当单独使用按钮进行位移时来完成对机械手的调整过程。如果一开始机械手并不在初始位置,则可以使用手动方式将机械手回归原位。我们选择作为端点进行输入端操作,这个时候就需要使用手动工作。分别用到对应的一系列控制按钮进行手动操作机械手的执行。当闭合开关时就能够让机械手松开所抓物体。如果操作过程中需要通过手动方式将机械手回归到初始位置,就需要使用将闭合实现对气缸的夹紧,使用缩回水平伸缩缸缩;想要夹紧气爪缸需要闭合开关。
3.2自动梯形图程序
控制程序是自动梯形图的主要组成,通常分为单步形式、连续形式和周期形式。以上三种形式的主要区别在于是允许转换标志还是连续标志。非单步和单步的主要区别在于:当系统在执行周期性或者连续性工作的时候,的触点实现,对步与步转换方式的允许。
4结语
总之,作为一种能够进行自动定位的控制设备,机械手能够依靠编程的方式成为一项极具实用性的多用设备。它在工业自动化生产中占据着重要的位置。未来有关人员还需要对其展开更进一步的探讨。
参考文献:
[1]基于PLC的气动机械手控制系统设计[J].南博.内燃机与配件.2018(19).
[2]气动机械手的PLC控制系统设计[J].杨密.装备制造技术.2015(02).
(作者单位:巨轮智能装备股份有限公司)
作者简介:吴孜(1992.8-),男,广东揭阳人,汉族,大专,机械设计技术员(数控铣工技师),研究方向:基于PLC的机械手控制系统设计研究。
