基于VISSIM的微观交通仿真模型参数标定研究
2020-10-20张鹍鹏刘鼎谢秉磊
张鹍鹏 刘鼎 谢秉磊

摘要:在仿真软件进行交通仿真之前,必需进行模型参数的标定,以提升交通模型的适用性和交通仿真的准确性。目前国内应用的主流交通仿真软件大多依托于国外交通特性开发,不能充分适用于我国实际交通运行特征。在已有研究的基础上,本文借助VISSIM COM接口,以排队长度、最大排队长度、旅行时间、出行延误为评价指标,借助遗传算法的智能寻优功能,利用C#语言开发了模型参数标定工具,实现了29种模型参数的自由组合以及自动化和便捷化标定,并且用深圳市实际案例验证了模型算法的有效性。本研究提供了一套通用性强、操作便捷的模型标定方法,可为实际模型标定工作提供支持。
Abstract: It is necessary to calibrate parameters to improve the applicability of traffic models and accuracy of traffic simulation before conduction of the traffic simulation. At present, most of traffic simulation software applied in China is mostly developed by the foreign traffic characteristics, but it cannot adapt to the actual traffic operation characteristics of China. On the basis of the existing researches, with the help of VISSIM COM interface, this paper takes the queuing length, maximum queuing length, travel time and travel delay as the evaluation indexes, and uses the intelligent optimization function of genetic algorithm. Then the calibration tool of model parameters is developed by using C# language, which realizes the automatic and convenient calibration of 29 model parameters. The model algorithm is verified by the actual case in Shenzhen. This study provides a set of universal and convenient calibration method for driving behavior model, which can provide support for the actual model calibration work.
關键词:交通仿真;VISSIM;参数标定;遗传算法;标定工具
Key words: traffic simulation;VISSIM;parameter calibration;genetic algorithm;calibration tool
中图分类号:U491 文献标识码:A 文章编号:1006-4311(2020)28-0189-05
0 引言
在实际重大工程建设、片区交通改善、重点活动交通组织等项目中,常利用Vissim、Tansmodeler、PARAMICS等微观交通仿真软件进行方案评估,旨在对方案实施前后的效果、交通影响进行量化分析,辅助比选设计方案,以提升决策的科学性。然而这些微观交通仿真软件均从国外引进,其软件参数默认值反应了国外交通特性,不符合我国国情。同时在实际工程应用中,交通仿真人员又常常轻视模型的参数标定工作,导致仿真结果可靠性、准确性较差。同时,目前常用的参数标定方法是有经验的工程师依据现状观测值手动进模型参数调试,存在参数标定时间长、人员专业性要求高等缺陷,故而亟需建立一套面向工程应用的、通用性强、操作简便的微观交通仿真模型标定方法。
杨洪利用多情景实验分析,对比仿真结果与规范值,来确定合理的参数取值范围。Ciuffo B提出利用流量和速度校正模型。孙剑采用遗传模拟退火启发式算法建立了VISSIM仿真模型校正算法。成卫提出微观交通参数及动态路径选择的校正设计流程。Ciuffo B利用遗传算法为校准算法,建立了全局参数敏感性阐发方法对高峰时间段的模型进行校准。朱林波利用BP神经网络技术研究模型中各参数对主-辅路行程时间这一评价指标的影响。卢守峰借助流量速度图,以最小化流量速度图的实测值与仿真值的差异为优化目标来标定Wiedemann74模型参数。Punzo V提出了一种混合交通流下仿真模型校正的方法。杨艳芳借助SOGA算法,优化了染色体编码、适应度函数等算法流程,提高了标定效率和准确性。孙惠芳从乘客属性、心理特征、行为特征、设施环境、其他行人影响等方面分析不同群体的交通特性差异性。
2.3 模型标定实现
C#是微软公司发布的一种面向对象的、运行于.NET Framework和.NET Core(完全开源,跨平台)之上的高级程序设计语言。
研究中利用C#调用VISSIM COM接口,同时编写遗传算法求解程序,借助高效的桌面端应用开发功能,实现模型参数标定的可视化,标定界面如图2所示,具备微观交通仿真基础参数设置、评价指标选取、遗传算法优化、待标定参数选取以及最优化标定结果输出等功能。
微观交通仿真模型参数标定的具体流程为:
Step1:初始化仿真路网,设置仿真时间、仿真精度、随机种子等仿真参数;
Step2:选取平均排队长度、最大排队长度、旅行时间、车辆延误中的一个或多个作为交通仿真评价指标;
Step3:设置遗传算法收敛条件、选择概率、交叉概率、变异概率等参数;
Step4:从跟驰模型和车道变换模型中选择需要标定的模型参数;
Step5:点击运行,通过VISSIM COM接口将参数传入VISSIM软件中,仿真运行结束后,通过COM接口调用交通仿真评价指标的取值,计算适应度值。检查是否满足收敛要求,若是,转到Step7;若不是,转到Step6;
Step6:对种群中的每个染色体代表的参数序列,进行选择、交叉和变异操作,生成新的种群,转到Step5;
Step7:模型参数标定结束,输出最优化参数序列。
3 模型标定算法验证
为验证模型标定方法的有效性,利用VISSIM搭建深圳市某交口的仿真环境,交叉口位于两主干路相交处,早晚高峰流量很大,项目采集到2019年6月4日7:00-9:00的流量、信号配时、交通构成、交叉口转向等数据,同时在VISSIM设置了检测器,采集排队长度、出行时间、延误时间等信息。
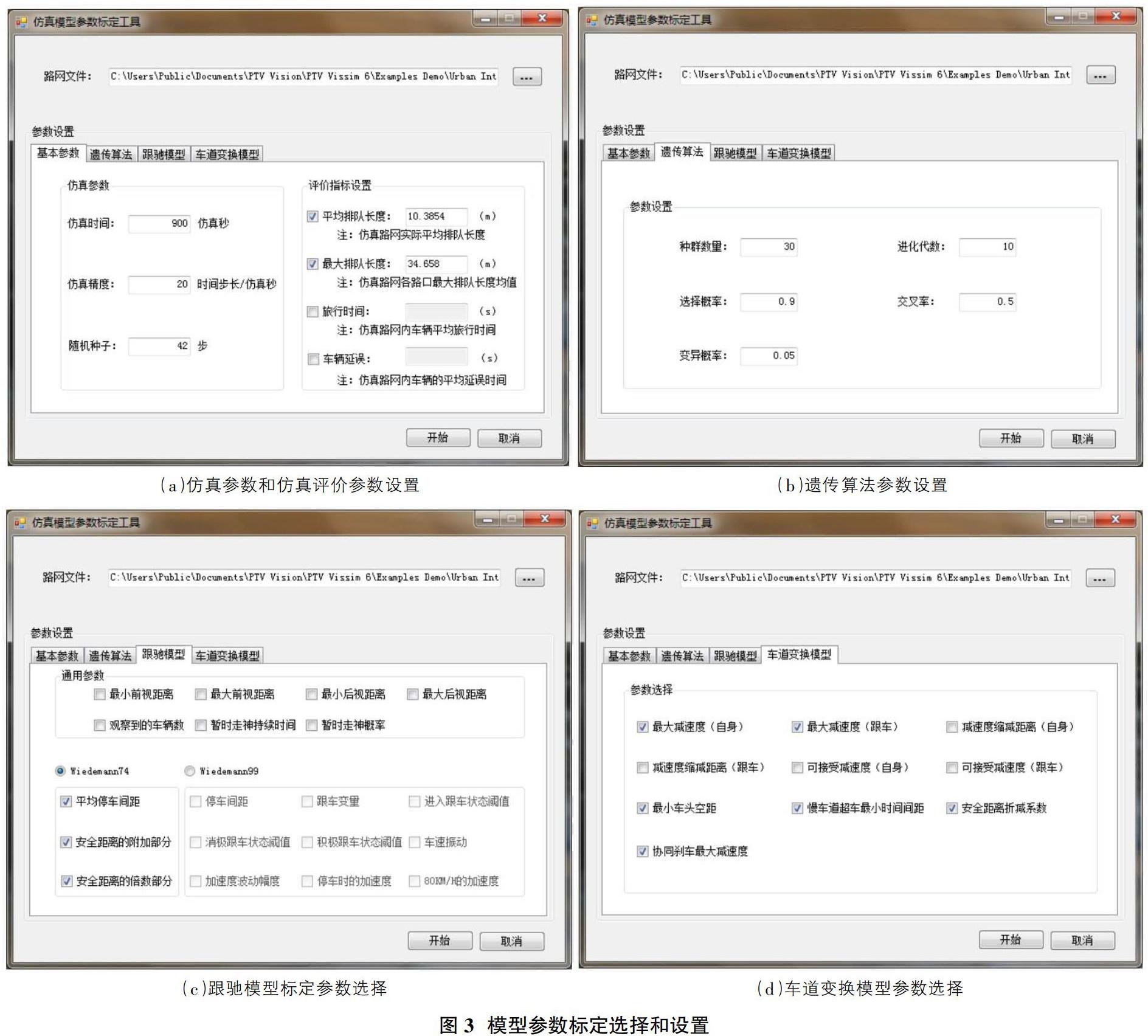
遗传算法参数设置:种群数量为30,进化代数为10,选择概率为0.9,交叉概率为0.5,变异概率为0.05。以平均排队长度和最大排队长度与实测值差的绝对值作为适应度评价函数,当程序运行到最大迭代次数时,将停止运算输出最优化的参数标定结果。
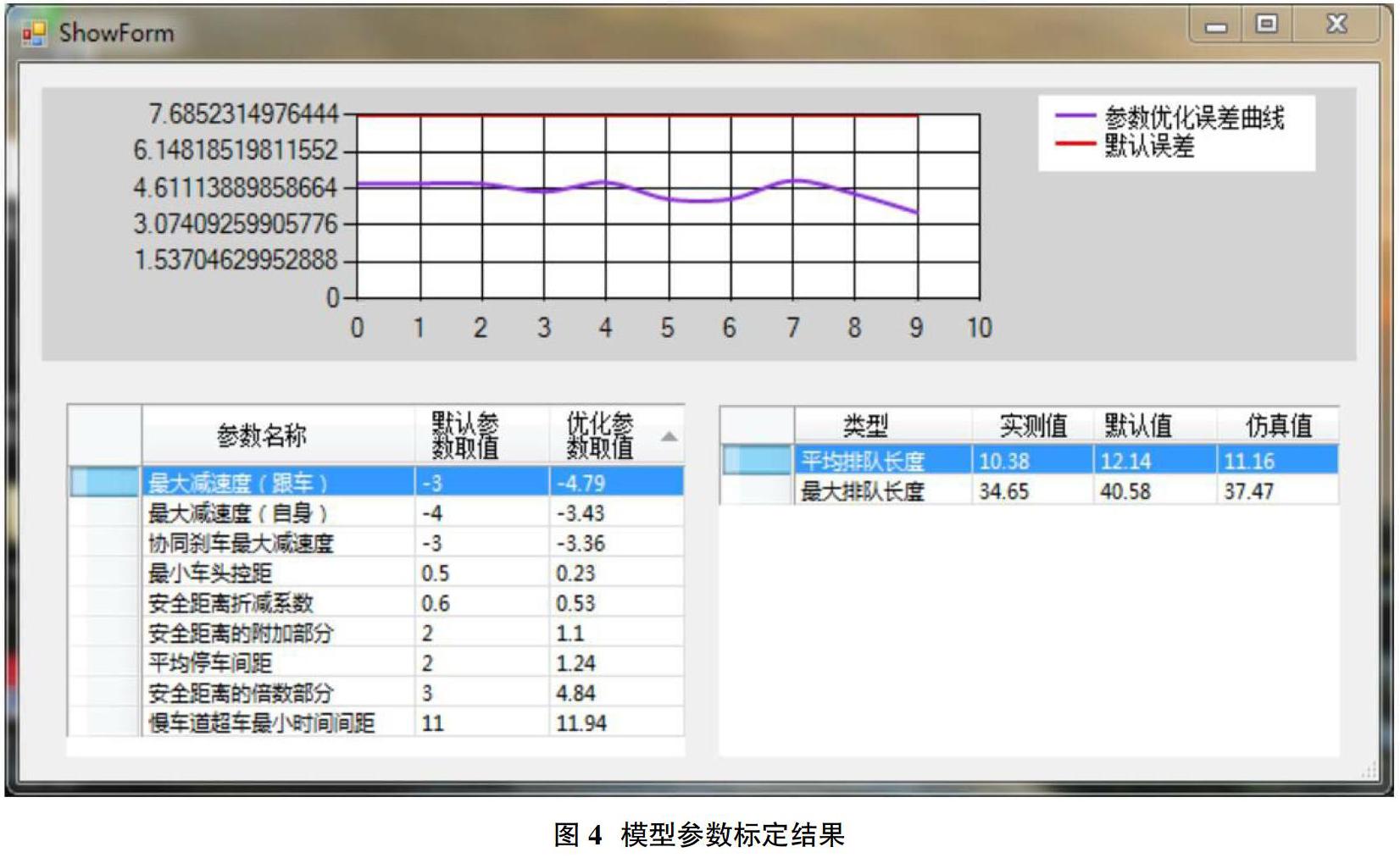
本次实验中选用跟驰模型的安全距离折减系数、安全距离的附加部分、安全距离的倍数以及换道模型的平均停车间距、最小车头空距、最大减速度(跟车)、最大减速度(自身)、协同刹车最大减速度、慢车道超车最小时间间距等9项参数作为待标定参数,点击开始进行模型参数标定,模型标定参数选择和设置情况及运行结果如图3和图4所示,目标函数值和参数标定结果取值情况如表3和表4所示。
从表3可知,利用VISSIM软件默认参数进行仿真时,排队长度和最大排队长度与实际观测值的误差分别为16.90%、11.32%,利用优化后参数进行仿真的误差分别为7.46%、8.11%,与实际情况的拟合程度分别提升了9.44%、3.21%,表明标定后的模型能够更好的再现实际交通运行状况。
4 结论
本次研究实现了微观仿真模型参数的自动标定。通过借助VISSIM COM接口,以排队长度、最大排队长度、旅行时间、出行延误为评价指标,借助遗传算法的智能寻优功能,利用C#语言实现了29种模型参数标定的自动化和便捷化。同时利用实测数据验证了模型算法的有效性和合理性,能够为微观交通仿真工作提供支撑。
在后续研究中,可考虑应用到更大范围的路网上,以进行分路段、分片区的微观交通仿真模型的参数标定。此外,同时也可结合检测器、卡口等设备的实时交通流量、排队长度、速度等据,可以来进行实时仿真情景下的模型参数标定研究。
参考文献:
[1]杨洪,韩胜风,陈小鸿.Vissim仿真软件模型参数标定与应用[J].城市交通,2006(6):22-25.
[2]Ciuffo.B, V.Punzo, V. Torrieri. A Framework for the Calibration of Microscopic Traffic Flow Models [C]. Transportation Research Board Annual Meeting, Washington, D.C., Jan2007.
[3]孙剑,杨晓光,刘好德.微观交通仿真系统参数校正研究[J].系统仿真学报,2007(1):48-50.
[4]Manjunatha, P., Vortisch, P. and Mathew, T.V. Methodology for the Calibration of VISSIM in Mixed Traffic. Transportation Research Board 92nd Annual Meeting, 2013: 13-3677.
[5]成衛,袁满荣,陈辉.基于Q-paramics的微观交通仿真模型参数校正[J].系统工程,2013(02):46-50.
[6]成卫,金成英,袁满荣.基于遗传模拟退火算法的TRANSMODELER仿真模型参数标定研究[J].武汉理工大学学报(交通科学与工程版),2014,38(03):478-482.
[7]卢守峰,王丽圆.宏观标定方法在Wiedemann驾驶行为阈值研究中的应用[J].公路交通科技,2014,31(9):115-119.
[8]Punzo V, Montanino M, Ciuffo B. Global sensitivity analysis techniques to simplify the calibration of traffic simulation models. Methodology and application to the IDM car-following model[J]. IET Intelligent Transport Systems, 2014, 8(5): 479-489.
[9]朱林波,罗霞.基于人工神经网络的微观交通仿真模型参数灵敏度分析[J].武汉理工大学学报(交通科学与工程版),2014(2):426-430.
[10]孙惠芳.城市轨道交通车站通道行人步行微观参数实测分析[J].交通科技与经济,2017,19(6):33-38.
[11]杨艳芳,秦勇,努尔兰 木汉.基于SOGA的VISSIM仿真模型参数标定方法[J].交通运输系统工程与信息,2017(3):91-97.
[12]吴娇蓉,辛飞飞.交通系统仿真及应用[M].上海:同济大学出版社,2012.
[13]卢守峰,刘喜敏.微观交通仿真[M].长沙:中南大学出版社,2016.
[14]PTV. VISSIM 6 USER MANUAL [Z] .German: Transport Verkeher AG 2014.
[15]胡婷.面向快速路交织区的微观交通仿真模型标定研究[D].北京:北京交通大学,2010.
[16]王雪松,朱美新.基于自然驾驶数据的中国驾驶人城市快速路跟驰模型标定与验证[J].中国公路学报,2018,31(9):129-138.
[17]尹俊淞.基于道路速度-排队长度的VISSIM参数标定建模与算法[J].交通运输工程与信息学报,2019(3):144-151.
[18]李美影.基于改进遗传算法的微观交通仿真模型参数标定方法研究[D].济南:山东大学,2019.
[19]刘媛媛.面向C#程序的异常处理系统的设计与应用[D]. 西南交通大学,2016.
基金项目:教育部科技发展中心产学研创新基金“多源城市大数据驱动的居民出行时空模式分析与建模”(2018A01025);深圳市哲学社会科学规划课题“多源城市大数据驱动的粤港澳大湾区交通网络一体化协调发展研究”(SZ2019C004);国家自然科学基金项目“基于交通行为的道路网络脆弱性识别及改善策略研究”(71473060)。
作者简介:张鹍鹏(1981-),男,河南鹤壁人,教授级高级工程师,博士在读,研究方向为轨道交通规划、交通信息化等。
