双起升岸边集装箱起重机吊具防摇防扭控制系统设计
2020-10-20杨育青曹雪东
杨育青 曹雪东
岸边集装箱起重机(以下简称“岸桥”)是集装箱码头的主要装卸设备。在单起升单吊具岸桥作业过程中,主小车作业时间长于门架小车作业时间,导致主小车与门架小车难以协同作业,从而对岸橋作业效率提升产生不利影响。为此,很多自动化集装箱码头采用单起升双吊具岸桥。单起升双吊具岸桥的优点是能够同时作业4个20英尺集装箱或2个40英尺集装箱,作业效率较高,但存在以下缺点:(1)双吊具之间连接柔软,无法应对前后或左右偏载工况;(2)单吊具作业模式与双吊具作业模式的切换时间较长;(3)在双吊具作业模式下,吊具载荷不得超过额定起升载荷(一般为65 t)。与单起升双吊具岸桥相比,双起升岸桥采用双起升双吊具结构,不仅作业效率较高,而且不存在单起升双吊具岸桥的上述缺点,能够较好地满足自动化集装箱码头作业需求;但在应用过程中,需要确保吊具防摇防扭控制系统的可靠性和灵活性。本文针对自动化集装箱码头双起升岸桥作业工况,设计双起升岸桥吊具防摇防扭控制系统,实现双起升岸桥吊具在双起升、海侧单起升和陆侧单起升等作业模式下的防摇防扭和半自动控制功能,从而为双起升岸桥在不同工况下的高效作业提供保障。
1 双起升岸桥吊具防摇防扭控制系统主要功能
双起升岸桥吊具有双起升、海侧单起升(陆侧起升锚定)和陆侧单起升(海侧起升锚定)等作业模式。为了满足双起升岸桥远程自动化操作要求,在上述作业模式下,双起升岸桥吊具防摇防扭控制系统应当具备以下功能。
(1)防摇功能,即吊具在1.5个摇摆周期内的摇摆幅度不超过50 mm。防摇功能的实现原理如下:在小车架上安装电荷耦合器件相机(以下简称“相机”),并在吊具上架上安装带有红外线泛光灯的反射板(以下简称“反射板”);相机实时测定反射板的相对位置和摇摆角度,并将吊具下的集装箱状态实时反馈给吊具防摇防扭控制系统;吊具防摇防扭控制系统控制小车的运行速度和加速度,从而消除因小车加速和制动而引起的负载摆动。
(2)防扭功能,即吊具在1.5个旋转周期内的旋转角度不超过1啊7琅すδ艿氖迪衷砣缦拢旱蹙叻酪》琅た刂葡低惩ü嗷?反射板装置测定吊具偏转角度,并根据吊具偏转角度调节前大梁或后大梁多功能液压站的油缸,实现吊具前后倾角度、左右倾角度和旋转角度的自动调节,从而使吊具始终保持在系统设定的角度位置。
(3)半自动控制功能,即控制小车和起升机构沿规划路径安全、平稳、高速、精准地移动至目标位置,并且定位误差不超过30 mm。半自动控制功能的实现原理如下:吊具防摇防扭控制系统利用相机-反射板装置反馈的信息,结合岸桥载荷的起始位置、目标位置及障碍物分布情况,根据设定的预测模型,自动生成最优规划路径,并控制岸桥载荷从起始位置沿规划路径安全、平稳、高速、精准地移动至目标位置,从而实现装卸作业自动化。
2 双起升岸桥吊具防摇防扭控制系统硬件配置
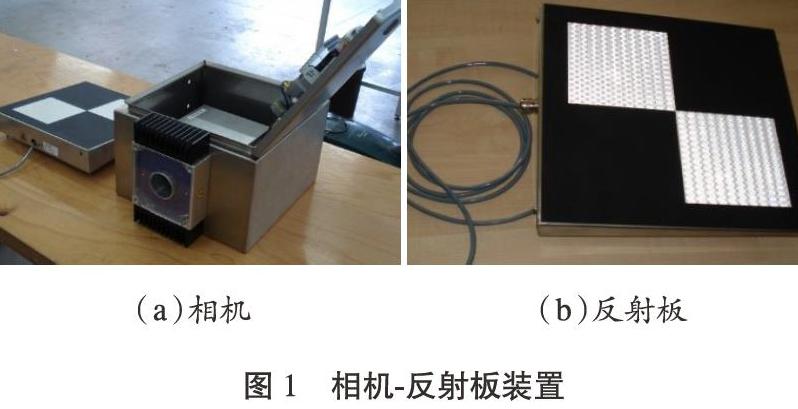
为了满足双起升岸桥远程自动化操作要求,双起升岸桥吊具防摇防扭控制系统必须兼顾不同的作业模式。经过反复研究,最终形成以两套独立的相机-反射板装置为主的硬件配置方案:一套安装在岸桥陆侧起升机构上,用于在双起升和陆侧单起升作业模式下实现吊具防摇防扭功能;另一套安装在岸桥海侧起升机构上,用于在海侧单起升作业模式下实现吊具防摇防扭功能。如图1所示:相机采用不锈钢罩壳,焦距为25 mm,工作温度为 25~50癈;反射板表面为黑白相间的田字形,大小为500 mm?500 mm。
相机-反射板装置的安装要求如下:反射板位于吊具中心位置,相机与反射板的连线与小车架垂直。此外,需要注意的是:如果两套相机-反射板装置完全相同,那么在双起升作业模式下,陆侧相机会检测到两块反射板的数据,并因此而获得错误信息。为了避免相机检测到相邻吊具的反射板,将安装于海侧吊具上的反射板旋转90啊S捎诜瓷浒灞砻嫖诎紫嗉涞奶镒中危瓷浒逍?0昂蠹纯尚纬尚履0濉T诒甓ㄏ嗷问保山煌沧拔恢玫姆瓷浒迥0宥ㄒ逦煌J剑佣苊馑鹕饕的J较侣讲嘞嗷奔觳獾搅娇榉瓷浒宓奈侍狻?
3 双起升岸桥吊具防摇防扭控制系统软件应用
双起升岸桥吊具防摇防扭控制系统开发基于SIMATIC-SIMOTION-SINAMICS平台。通过调节相机的曝光度和视角识别反射板的状态信息,并由SIMOCRANE CenSOR采集相机-反射板装置的反馈信号。在SIMOCRANE中开发吊具防摇防扭功能。单起升岸桥吊具防摇防扭控制技术研究已较为完善,本文仅阐述双起升岸桥吊具防摇防扭控制系统与单起升岸桥吊具防摇防扭控制系统在软件应用方面的不同之处。
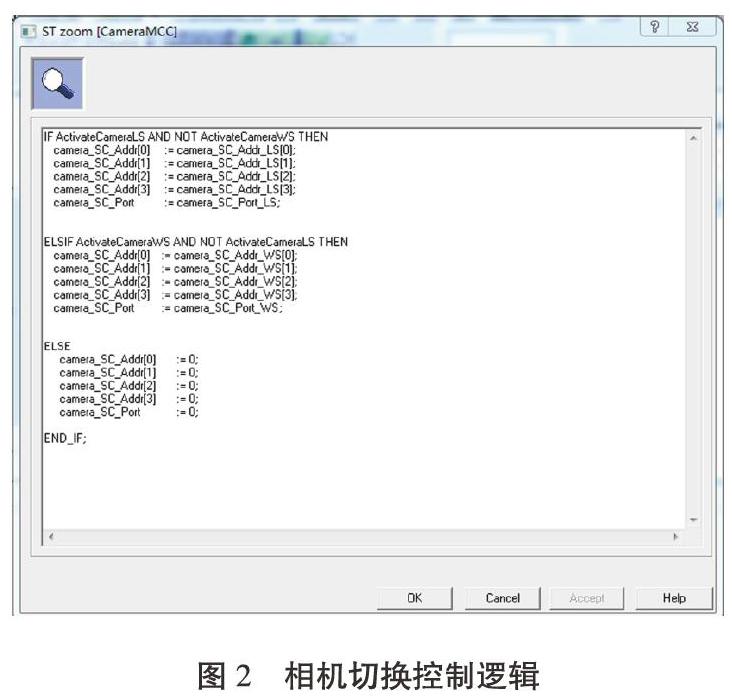
(1)虽然双起升岸桥配备两套相机-反射板装置,但只有一个SIMOTION控制器。在不同作业模式下,SIMOTION控制器在同一时刻只控制一套相机-反射板装置;因此,为两个相机分别设置相互独立的参数,由SIMATIC中的控制逻辑判断当前的作业模式并发送至SIMOTION控制器,并由SIMOTION控制器切换工作相机(见图2)。除了在软件上实现相机切换外,还通过设置相机选择开关,在硬件上确保SIMOTION控制器在同一时刻只读取一套相机-反射板装置的反馈数据,即:在双起升作业模式下,控制系统切换至陆侧相机进行数据连接;在海侧单起升作业模式下,控制系统切换至海侧相机进行数据连接;在陆侧单起升作业模式下,控制系统切换至陆侧相机进行数据连接。此外,在双起升作业模式下,当陆侧相机-反射板装置发生故障时,海侧相机-反射板装置可作为冗余装置,确保双起升作业正常进行,从而大大提高双起升岸桥作业的可靠性。
(2)由于双起升岸桥海侧上架液压分离油缸的最大行程为1.1 m,在双起升作业模式下,油缸伸缩可能造成吊具扭转,导致相机与反射板之间存在一定夹角。如果这一夹角被误判为因负载晃动而引起的夹角,那么吊具防摇防扭控制就会出现误差,并且吊具起升高度越高,误差就越大。为此,在控制算法中引入分离油缸编码器的反馈值,将其作为偏转角度的偏移量进行调整,从而避免产生上述问题。
(3)在半自动控制过程中,由于不同作业模式下的起升机构不同,除了切换相机外,还需要切换起升高度和弱磁控制。控制原则如下:在双起升和陆侧单起升作业模式下,采用陆侧起升机构的相关参数计算;在海侧单起升作业模式下,采用海侧起升机构的相关参数计算。
4 结束语
双起升岸桥吊具防摇防扭控制系统将两套相机-反射板装置应用于同一台双起升岸桥上,并由一个SIMOTION控制器控制,需要解决硬件组态、参数切换、安装位置调整和相机参数设定等问题。振华团队在项目实践过程中成功解决上述问题,为后来攻克双起升岸桥吊具因重心漂移而产生的易受环境影响、扭摆状态复杂多变、难以实现运动控制等问题打下坚实基础。随着时代发展,传统集装箱码头的自动化改造是大势所趋。双起升岸桥吊具防摇防扭控制系统除了应用于新建自动化集装箱码头外,也可为传统集装箱码头自动化升级改造提供解决方案。
(编辑:张敏 收稿日期:2020-06-16)