基于相位法的矿用激光测距仪设计
2020-10-20赵庆川
赵庆川
摘 要:针对传统煤矿顶底板移近量测量无法实时监测、检测精度低、实用性差的问题,设计了一种采用集成相位法测距原理的激光测距模块作为距离测量核心模块的激光测距仪,显著提高了顶底板移近量测量的检测精度和实时性。从器件选型、逻辑控制机制两方面详细介绍了降压转换电路、接口EMC电路、五位数码管显示电路、遥控电路、激光测距模块接口电路、通讯电路六部分电路原理图设计方案,以及测距仪的软件执行逻辑流程。测距仪进行了实验室和现场基本性能和功能试验,实验结果表明,测距仪具有检测精度高、煤矿顶底板测距实用性强的特点,满足设计需求。
关键词:相位法;激光测距;总线通讯;接口EMC;遥控电路
中图分类号:TD326 文献标识码:A
Design of Mining Laser Rangefinder Based on Phase Method
ZHAO Qing-chuan1,2?
(1. Chongqing Research Institute,China Coal Technology Engineering Group,Chongqing 400039,China;
2. State Key Laboratory of Gas Disaster Monitoring and Emergency Technology,Chongqing 400039,China)
Abstract:Aiming at the problems of the traditional mine measuring instruments and methods about roof to floor convergence that can not be monitored in real time,the detection accuracy is low and the practicability is poor,an innovative laser rangefinder is designed,which uses the integrated phase ranging principle as the core module of distance measurement,and the detection accuracy and real-time performance of roof to floor convergence are greatly improved. Six parts of the circuit schematic scheme are presented in details from two aspects of device selection and logic control mechanism,including the step-down circuit,interface EMC circuit,five digital tube display circuit,remote control circuit,interface circuit of laser ranging module,communication circuit,and the software execution logic flow of the rangefinder are presented in details too. The basic performance and function of the rangefinder are tested in laboratory and field,the experimental results show that the rangefinder has the characteristics of high detection accuracy and strong practicability of coal mine roof to floor convergence,which meets the design requirements.
Key words:phase method;laser range finder;bus communication;interface EMC;remote control circuit
隨着矿井开采深度的增加,特别进入超千米开采阶段[1-2],巷道围岩呈现出明显的软岩变形特征,已成为实际意义上的深井高应力软岩。随着矿井采深的增加顶板压力逐渐增大[3],围岩变形现象更加突出。因自重效应的影响,围岩以垂直变形为主[4]。目前大多矿井采用锚固支护,两帮及顶板进行了锚固,因此垂直变形又以底鼓为主[5-7]。为了掌握巷道顶底板变形的情况,大多矿井采用人工测量的方式,费工费时且测量准确性差[8]。近年来,机械式顶底板测距仪和超声波测距传感器逐渐被用于围岩变形测量,但是机械式顶底板测距仪虽然超声波测距不受电磁、烟雾和粉尘等因素的干扰,但测量的精度往往只能达到分米量级[9],不满足矿井巷道顶底板移近量精确测量的需要。激光测距作为一种测量技术,与其它测量手段相比,因具有非接触式、测量速度快、精度高、距离远、抗干扰能力强等独特优势而被广泛应用于多种领域[10-11],并且测量精度受煤矿环境影响小。鉴于此,设计了一种基于相位法的矿用激光测距仪[12],具有毫米级的检测精度和较低的整机功耗,测距仪采用数码管显示,具有精度调校、超限报警等功能,通过RS485总线与监控分站通讯,实现顶底板移近量的实时监控。
1 测距仪工作原理及总体设计
1.1 相位法测量原理
相位法激光测距是对激光束按照无线电波段的角频率ω和特定波长λ进行幅度调制[13-15],通过测定调制后激光束在被测距离间往返一次所产生的相位延迟φ,换算此相位延迟所代表的距离D。其公式为
其中 U数值等于1/2λ,作为测距的1个单位长度。n表示光束往返距离D所需波长的整数值,Δn表示不足一个波长的分量。
根据相位法激光测距原理及公式算法,我们设计了由激光调制发射电路、光电检测电路、频率综合电路以及数字测向电路构成的激光测距模块,模块与主板单片机采用UART串口通讯,将距离数据上传给单片机。
1.2 传感器总体设计
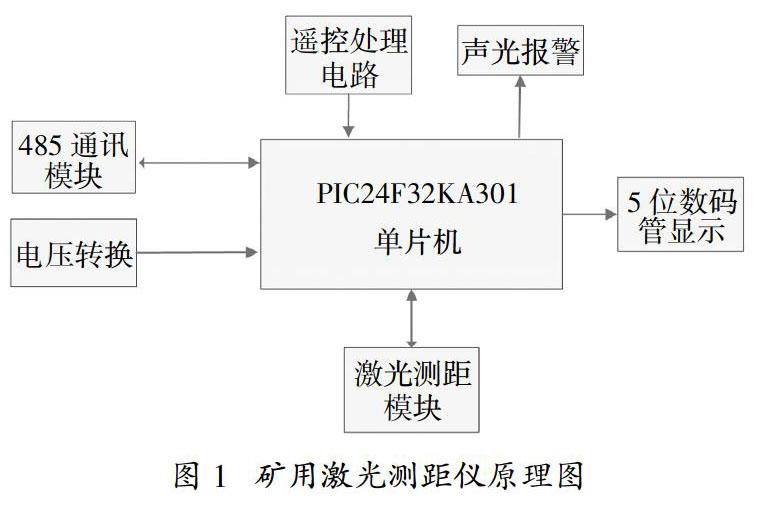
激光测距仪电路设计框图如图1所示,测距仪硬件电路主要由电压转换电路、激光测距模块、遥控处理、声光报警、RS485通讯、数码管显示六部分电路组成。
测距仪采用低功耗的PIC24F32KA301单片机,单片机具有2路UART串口,一路用于激光测距模块通讯,一路用于RS485通讯芯片交互数据。单片机内置12位AD、片内EEPROM等硬件资源,用于模拟信号采集和存储报警点、通讯地址等参数,具有二十余个GPIO端口,可用于显示驱动和逻辑控制。
2 硬件电路设计
2.1 降压电路设计
为测距仪供电的关联本安电源输出电压为24 V,而测距仪的电路主板元器件主要供电电压为5 V以内,因此测距仪设计降压转换电路将9~24 V直流电压转换为适合单片机及元件工作的5 V电压,降压电路如图2所示。
电压转换电压核心芯片采用TI公司的DC-DC开关电源芯片LM25011,该芯片输入电压可达42 V,最大输出电流2 A,完全满足激光模块激光器工作时瞬态电流要求。芯片在输出电流200 mA时转换效率可达90%以上,且芯片具有内部集成延时缓启动功能,从而有效平滑电源电压波动。芯片第8引脚FB处的反馈电压为2.5 V,精度为±2%,通过R2、R3电阻构成分压反馈电路,因此输出电压为4 V。LM25011芯片静态电流11.5 uA,满足测距仪电压高效率转换及低功耗设计的需求。
单片机工作电压为2.0~3.6 V,兼顾效率和功耗,单片机采用3.3 V供电,采用型号为MCP1702的LDO芯片将4 V电压转换为3.3 V。
2.2 接口EMC电路
为提高测距仪的可靠性,必须对供电输入端口及RS485输出接口设计保护电路,提高电路防护静电、浪涌电流、群脉冲干扰的能力。接口保护电路如图3所示,在供电输入端口设计了型号为5KP33CA的TVS保护器件,标称保护电压为33 V,可承受7000 V瞬变电压。在RS485通信口设计了型号为SMCJ12CA 的TVS1保护器件,标称保护电压为12 V,可承受3000 V瞬变电压。在供电输入正极串联了型号为SS14的二极管,避免了电源正负极错接对电路板器件的损坏。
2.3 数码管显示电路
设计的激光测距仪检测量程为0~10 m,最小分辨率为1 mm。数码管显示电路具有5位段码式数码管,第一位为状态显示位,后四位为显示数值。1 mm显示样式为0.001,单位为米。显示电路采用动态扫描设计,每位数码管8段全亮时工作电流为2 mA左右。电路共需要“DB0、DB1、DB2、DB3、DB4、DB5、DB6、DB7”8根控制显示段位LED灯的引线,以及“LED4、LED3、LED2、LED1、LED0”5根数码管阳极供电控制引脚线,由单片机GPIO端口串联阻值为1K电阻直接驱动。
采用图4所示的动态显示电路,任意时刻只有一位数码管在上电点亮显示,同时DB0~ DB7输出对应字符的逻辑电平。每位数码管的刷新频率为30 Hz,而人眼能够识别的闪烁为25 Hz以下,因此动态显示电路在实现高亮度显示监测数值功能同时显著降低工作电流。
2.4 遥控电路设计
遥控电路采用型号为IRM-3638的红外线接收头接受操作信息指令,包括精度、报警点、通讯地址等参数都需要设置。具体电路如如图5所示。
电路主要包括红外线接收头IR1和三极管Q5及R9、R10、C5阻容器件组成。红外线接收头IR1接收到经调制的一定频率的红外光后,会在1管脚輸出高低电平信号。当IR1输出高电平时,Q5导通,Infra-red信息为“0”;当IR1输出低电平时,Q5为高阻抗状态,Infra-red信息为“1”。单片机采集到Infra-red信息及持续时间信息后,经过信息编码逻辑算法处理即可识别出遥控信息的指令,从而实现传感器设置信息的输入识别。
2.5 激光测距模块接口电路设计
激光测距模块工作电压为3.3 V,设计采用LDO芯片将4 V供电电压转换为3.3 V。LDO芯片型号为TPS77633,输出最大电流500 mA,满足激光测距模块瞬态工作电流设计要求。
激光测距模块接口电路如图6所示。为了降低激光测距仪的整机功耗,测距模块采用由单片机控制的间歇式供电方式。当MKGD为高电平时,TPS77633芯片输出使能引脚EN为低电平,芯片输出精度为2%的3.3 V,测距模块上电工作;当MKGD为高电平时,TPS77633芯片输出使能引脚EN为高电平,芯片无输出。
单片机与测距模块采用UART串口交互命令和数据,波特率为19.2 kbps,单片机每隔10 s读取一次测距模块的距离测量数据。
