面向意图的通用航空器冲突解脱自主决策方法*
2020-10-19王立超张洪海王中叶钱晓鹏
王立超 张洪海 刘 皞 王中叶 钱晓鹏
(南京航空航天大学民航学院 南京 211106)
0 引 言
研究低空通用航空器的冲突自主决策方法,建立较为系统的自适应冲突解脱规则与模型,提高通用航空器自主适应能力,对保证低空通用航空系统的运行安全,提高低空有限资源的利用率具有重要意义.
张翔宇等[1]利用仿真验证得出低空复杂飞行环境下飞行量、飞行冲突等参数之间的相互关系.管祥民等[2]以满意博弈论为基础构建冲突探测与解脱模型并实现了飞行安全条件下的成本降低.刘洋等[3]根据低空自由飞航线自主特点建立了一种以概率为基础的短时冲突探测方法,提高了冲突探测的准确性.王凯等[4]建立了实际有效地航路运行规则库供飞行器飞行调用.Billingsley等[5]开发了通用航空器防撞系统并降低了该设备安装的复杂性和成本.Yan等[6]利用二次规划算法实现了飞机选择最优逃生路径而避免碰撞.Alonso等[7]提出了可变邻域搜索求解方法加快了可行解的求解速度.Rey等[8]为有效、公平地解决空中冲突问题提供了一个可持续框架.以上文献中虽然方法较多但是未结合现实中通用航空器的任务类型与飞行性能,且未能考虑飞行员意图在通用航空器冲突解脱过程中所产生的影响.
文中通过分析通用航空器飞行任务、基本性能及飞行员意图等因素,建立面向任务的通用航空器自适应冲突解脱规则及自主决策模型,分析已建立规则及模型的合理性和有效性,确定面向任务的通用航空器冲突解脱自主决策方法.
1 影响因素分析
主要考虑通用航空器飞行任务、飞行性能,以及飞行员意图三方面因素的影响.飞行任务,低空开放空间的有限性及飞行任务的差异性,使不同飞行任务的通用航空器在同一空间和时间条件下具有不同的优先飞行权利.飞行性能,主要包括(非)旋翼、巡航速度、爬升能力等参数,将直接决定某种避让方式将更加适合该航空器的避让过程,当两航空器存在相同任务优先等级的情况下也可按照不同航空器飞行性能优先级进行避让方式的选择.飞行员意图,不仅可以决定自身所在航空器的调节行为,而且在飞行任务及飞行性能均相同时进行飞行员意图交互,确定各通用航空器自身调节方式,最终对通用航空器的自适应冲突解脱产生决定性影响.
2 冲突解脱规则及自主决策模型
2.1 冲突解脱规则
按照任务性质、飞行性能及飞行员意图对面临冲突的通用航空器进行冲突解脱排序,其中优先级高的航空器将保持原有飞行状态不变,优先级低的航空器根据飞行员意图及高优先级航空器的飞行状态和趋势确定自身避让调节方式.
2.2 冲突解脱自主决策模型
1) 整体逻辑见图1.
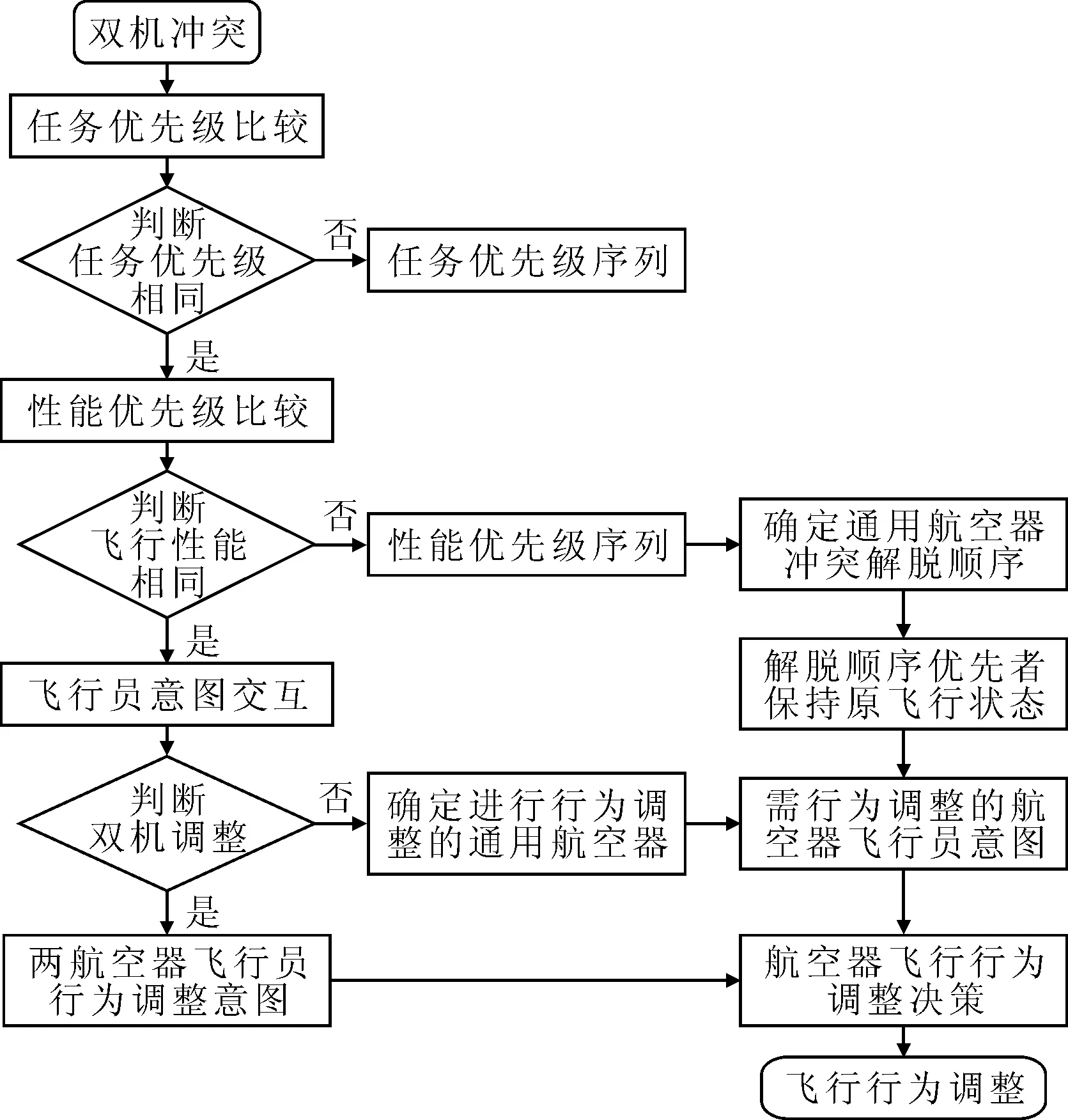
图1 两航空器冲突解脱飞行行为决策整体逻辑
2) 航空器飞行员意图 概率削减法,假定可供选择的调整行为分别为航向调节(HC)和高度调节(AC),初始概率相等且相加为1.当航空器处于冲突环境条件下,上述两调节方式中会随机(利用随机函数实现)出现一种调节行为的概率削减为原来的1/2,为了满足概率值加和为1的初始条件,则剩余调节方式的概率自然发生扩大改变.
两种调节方式最初概率值同时满足
PHC=PAC
(1)
PHC+PAC=1
(2)
概率削减过程为
(3)
满足概率为1,则
(4)
或有概率削减过程为
(5)
满足概率为1则有公式
(6)
3) 两航空器飞行员意图交互 以合作博弈理论为基础,将飞行员意图融入到虚拟成本总函数中作为各支付成本的支付系数,利用两通用航空器距离潜在冲突点的长度及各自飞行速度确定两通用航空器进行飞行行为调整时所需支付的虚拟成本.确定最小联盟支付成本并确定其所对应的调整方案.若两通用航空器均需要飞行行为调整,则比较各通用航空器在该调整方案中的贡献程度,令贡献程度较小的通用航空器优先确定调节方式,另一通用航空器随之确定调节方式.若只需一架通用航空器进行飞行行为调整,则按照1)整体逻辑中的S4步骤进行即可.
根据两通用航空器之间的位置关系及飞行速度大小,考虑通用航空器距离潜在冲突点越远则航空器越安全,确定随着距离的增大而支付成本降低;通用航空器速度越大航空器越在短时间内靠近潜在冲突点,则确定随着航空器速度的增大而支付成本变高,由此确定支付成本来源方程为
(7)
式中:xi为航空器A和航空器B的虚拟支付成本;li为航空器A和航空器B分别距离冲突点的长度;vi为航空器A和航空器B的分别飞行速度;k1为距离成本比重参数;k2为速度成本比重参数.
虚拟成本总函数为
cj(xA,xB)=(axA+bxB)(1+e-0.2(xA+xB))(8)
式中:j为联盟对应序号,在此拟定j=1时,A,B双机均选择调整;j=2时,A机选择调整,B机不进行调整;j=3时,B机选择调整,A机不进行调整;j=4时,A,B双机均不选择调整,此时两航空器将会发生碰撞风险,于是虚拟支付成本为无穷大,在实际运行过程中此方案将直接排除.a,b为支付系数,即两通用航空器飞行员调整意图的大小,若飞行员希望进行通航航空器行为调整则此支付系数确定为1,若飞行员不希望进行通用航空器行为则此支付系数确定为一个大于1的数.(1+e-0.2x)为合作博弈因子,用来表示两通用航空器在博弈过程中合作的有效程度.
最小联盟支付成本函数为
cmin(xA,xB)=min(cj)
(9)
式中:min(cj)为cj(j=1,2,3,4)中计算出支付成本的最小值.
虚拟成本总量最小值对应联盟调整方案中各成员贡献值比较算法为
(10)
式中:c(xAcmin(xA,xB))为非合作条件下联盟最小支付成本对应方案中航空器A需支付的总成本,具体计算方法为
c(xAcmin(xA,xB))=(axAcmin(xA,xB))(1+e-0.2xAcmin(xA,xB))
(11)
式中:c(xBcmin(xA,xB))为非合作博弈条件下联盟最小支付成本对应方案中航空器B需支付的总成本,具体计算方法为
c(xBcmin(xA,xB))=(bxBcmin(xA,xB))(1+e-0.2xBcmin(xA,xB))
(12)
式中:Δc为合作博弈条件下A,B双机共同节省的支付成本,具体计算方法为
Δc=c(xAcmin(xA,xB))+c(xBcmin(xA,xB))-cmin(xA,xB)
(13)
飞行员意图交互逻辑见图2.
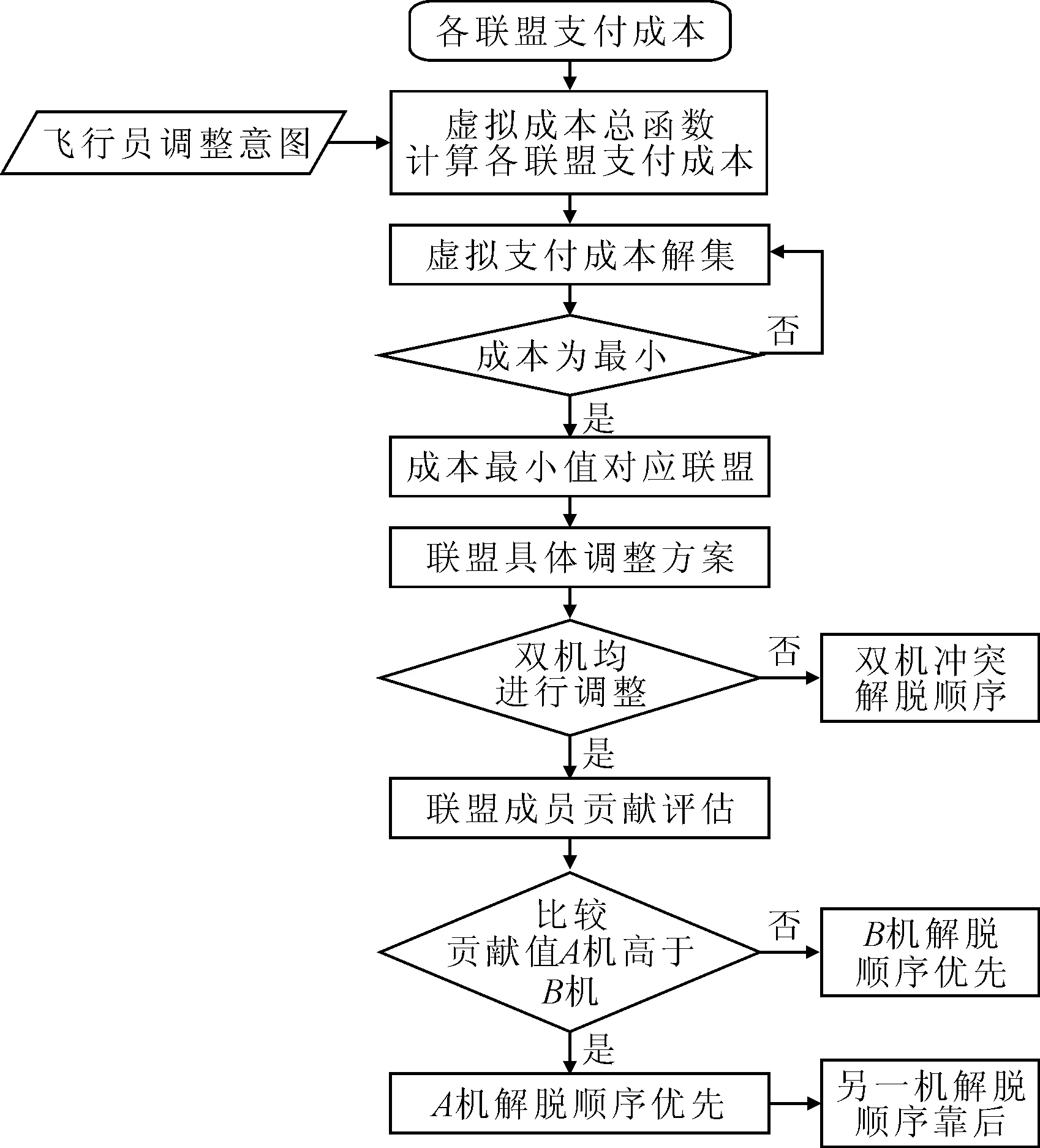
图2 基于合作博弈理论的飞行员意图交互冲突解脱策略决策流程
3 仿真分析
3.1 条件假设
假设面临冲突的两航空器最小安全间隔不小于5 km,两通用航空器对即将发生的冲突状况已知,通用航空器选择航向调整决策时,通用航空器将在原有航向基础上向右偏移一定角度,当通用航空器选择高度调整时,通用航空器将保持航向不变,高度上升(下降)一定距离.
本次仿真过程选择应急救援、短途运输两种典型飞行任务代表作为研究对象,根据文献 [9]中的优先级规则规定以上两种飞行任务的优先等级为应急救援高于短途运输,见表1.
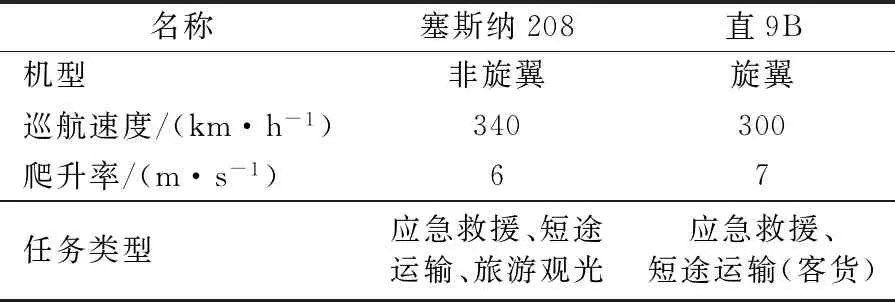
表1 两种通用航空器特点及性能
选择塞斯纳208、直9B两种典型通用航空器为实验对象,其性能特点如表1所示,结合文献[10]中飞行能力较强的航空器应为飞行能力较弱的航空器让出航路等规定,在此将以上两航空器间的性能优先级确定为塞斯纳208高于直9B.
3.2 仿真实验
以两通用航空器飞行任务优先等级及飞行性能优先等级相同为前提,分别在vA=vB、lA=lB,vA≠vB、lA=lB,vA=vB、lA≠lB,vA≠vB、lA≠lB四种场景下,各场景具体参数设置详见表2,对支付成本源方程中k1、k2参数值进行相对变化分析,选取2和3作为参数b的取值分析飞行员不同程度调整意图交互对决策结果的影响,比较分析各飞行场景下两航空器合作博弈成本与非合作博弈成本值,计算各场景中飞行员意图合作博弈值较非合作博弈状态下的降低率,利用Matlab对较为简单的场景实现两航空器冲突解脱自主决策仿真,证明本次模型建立的有效性和可实现性.
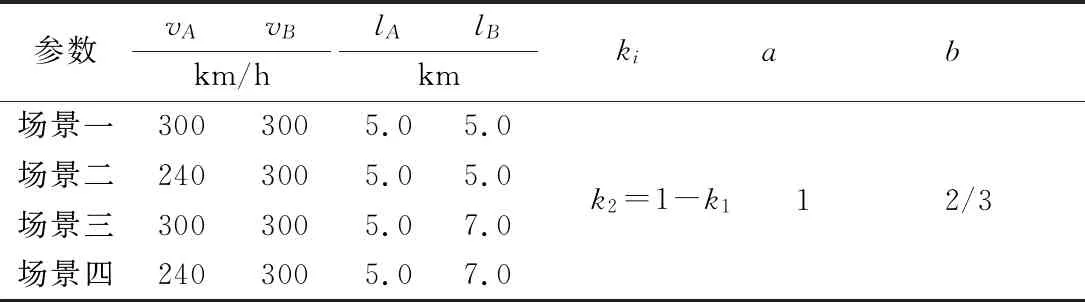
表2 四种场景参数设置详情
图3为四种场景下飞行员意图合作博弈所需支付虚拟成本随ki及b取值不同而发生的变化趋势.由图3可知,随着虚拟成本来源方程中k1取值的逐渐增大k2取值的逐渐减小,各场景下通用航空器飞行员意图合作博弈虚拟支付成本ci均成下降趋势,由此可以看出ci变化趋势与k2取值变化密切相关,两通用航空器距离潜在冲突点距离在一定范围内时,通用航空器飞行员意图合作博弈虚拟支付成本ci受飞行速度影响程度较大,并且合作博弈虚拟支付成本ci会随着虚拟成本来源支付方程中k2的减小而减小.
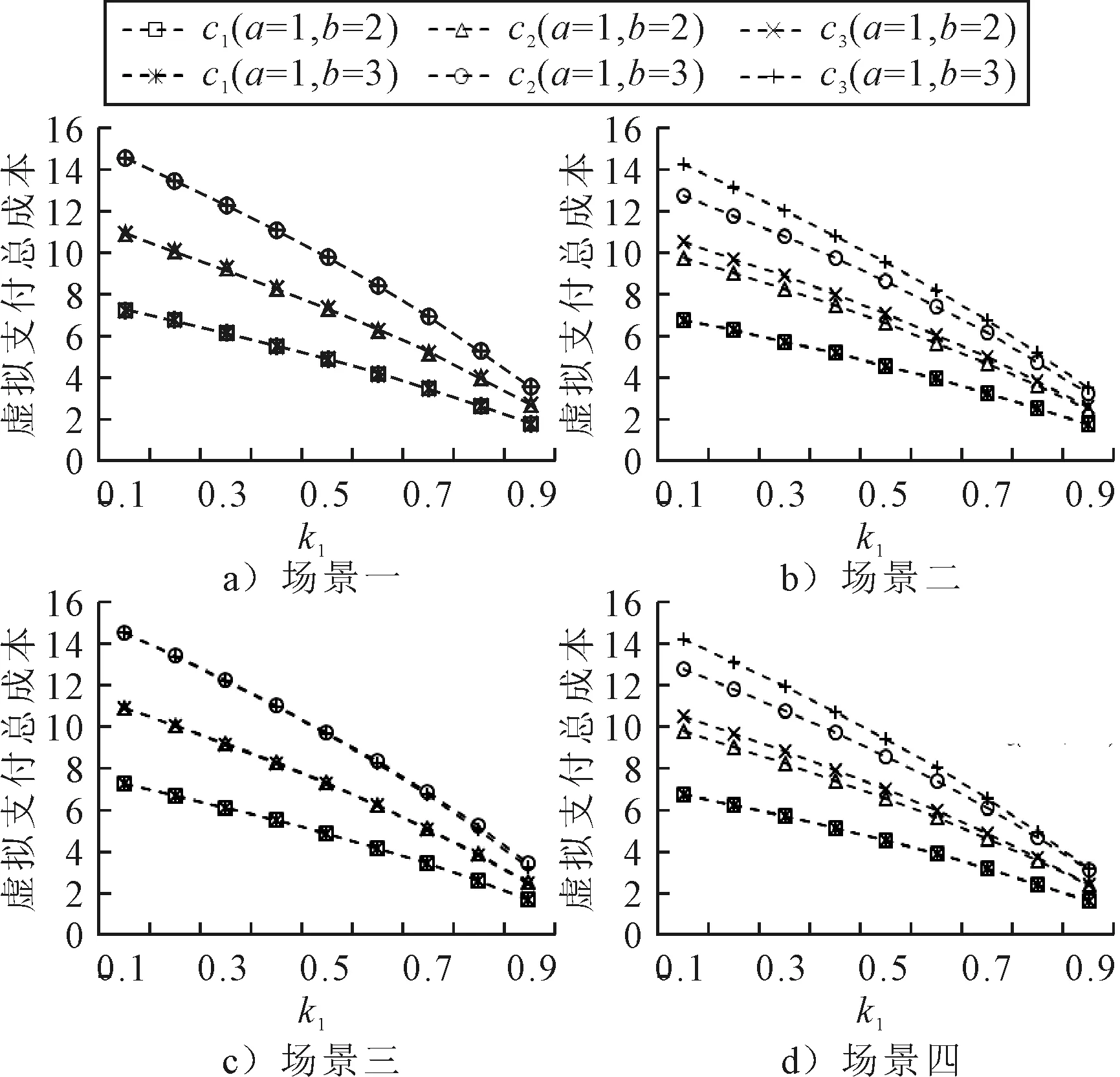
图3 四种场景ci随ki,b取值变化趋势图
无论b(b=2/3)取何值,c2,c3的值均大于c1.由于c1计算过程中定义航空器A,B两飞行员意图均愿意进行飞行行为调整使得合作博弈计算过程中的意图参数取值相同,所以出现了c1(a=1,b=2)=c1(a=1,b=3)相等的情况.由于c2,c3的计算方式具有一定的轮转对称性,且两航空器飞行速度及距离潜在冲突点的长度均相等,因此使c2(b=2、b=3)=c3(b=2、b=3).由于合作博弈虚拟支付成本ci受飞行速度的影响程度较大,使得两航空器飞行距离不同时有c2(3)(b=2)明显小于c2(3)(b=3).由于合作博弈虚拟支付成本ci受距离潜在冲突点长度的影响程度较小,使得两航空器距离潜在冲突点长度不同时有c2(3)(b=2)略微小于c2(3)(b=3).两航空器飞行速度及距离潜在冲突点的长度均不相等,使得c2(3)(b=2)明显小于c2(3)(b=3).以上对比分析能够初步证明飞行员不想进行飞行行为调整的意图越强烈时冲突解脱过程中所需要付出的虚拟总成本越高.

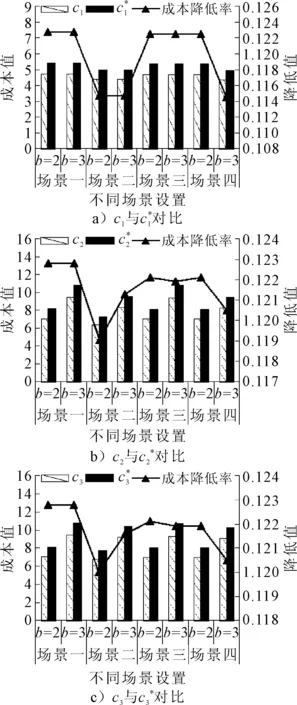
图4 各场景下ci与对比
在此选取飞行任务、飞行性能均相同的两航空器进行飞行员意图交互及决策过程仿真,设定两航空器飞行速度及距离潜在冲突点长度相同,经两航空器飞行员意图交互确定方案1(两通用航空器均进行行为调整)为冲突解脱决策方案,然后按照飞行员行为选择偏好进行飞行行为选择,其中航空器A选择高度调整,航空器B选择航向调整,具体仿真实验过程见图5.仿真实验证明通用航空器冲突解脱自主决策方法能够实现飞行冲突条件下的自主解脱.

图5 飞行员意图交互决策方案1仿真过程
4 结 束 语
考虑通用航空器任务性质、飞行性能及飞行员意图等因素,确立了面向任务的通用航空器冲突解脱规则,建立了面向任务的通用航空器冲突解脱自主决策模型,利用合作博弈理论实现通用航空器飞行员意图交互,降低了非合作博弈状态下通用航空器冲突解脱虚拟成本总量的12%.分析得出多种场景下ki(i=1,2)、b(b=2/3)不同取值时合作博弈虚拟支付成本与航空器飞行速度、间隔距离及飞行员意图之间的变化规律.
