基于经验模态分解的车内声品质EMD-ANE主动控制算法
2020-10-18窦雪婷王岩松王统洲
窦雪婷, 王岩松, 王统洲
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
汽车噪声及声品质作为影响乘坐舒适性的重要因素之一,越来越受到消费者的关注[1].目前,车内低频噪声仍未得到良好控制.而声品质这一概念的提出,使人们对声音的主观感受有了具体的参量表达[2].近年来,声品质主动控制(Active Sound Quality Control,ASQC)作为解决这一问题的有效方法之一,受到研究者的广泛关注.
Blauert[3]于1994年提出声品质,其定义为在特定的技术目标或任务下对声音适宜性的描述,“声”并不是单纯声波这样一个物理过程,而是指人耳的听觉感知过程,“品质”则是指人耳对于声音事件感知过程最终做出的主观判断[4].声品质主动控制是在噪声主动控制的基础上发展而来的,在控制过程中通过对噪声进行一部分保留,以达到调节声品质的效果.Lueg[5]于1933年提出噪声主动控制的基本原理是叠加原理,并对其进行详细说明.目前噪声主动控制算法主要有以最小均方算法(LMS)为基础的算法,如多通道LMS、滤波X算法(FXLMS)和滤波U算法(FULMS),和以递归最小二乘算法(RLS)为基础的算法[6-8].声品质主动控制算法在某些应用情况中,保留指定频率的残余噪声,可以给人提供更好的听觉感受[9-10].刘宗巍等[11-12]先后提出基于FXLMS算法的车内噪声主动控制策略、Bark尺度以及选择性消声控制方法,对车内声品质水平进行控制.
汽车行驶过程中,车内人员耳侧噪声的源信号众多,噪声信号呈现非线性、非平稳性的特点[13],这就使得在数学上很难得出一个准确的关于噪声源信号影响变化的关系表达式.为提高噪声主动控制的精度,必须考虑降低噪声信号的非平稳度.目前,小波分解[14]和经验模态分解(Empirical Mode Decomposition,EMD)[15-16]被用于处理这类信号,但是小波分解在处理信号之前,必须选取合适的小波基和分解尺度,并且一旦选定不可随意更改,这在很大程度上影响分解结果.EMD是一种时频信号处理技术,可以通过获得一组固有模式函数(Intrinsic Mode Function,IMF)来克服这个问题.IMF频谱具有不同的尺度特征,同时,由于自适应性和高鲁棒性,EMD已被广泛应用于处理非平稳信号[17].
本文结合EMD方法与噪声自适应均衡(Adoptive Noise Equalizer,ANE)算法的优势,提出一种EMD-ANE车内声品质主动控制算法.经EMD分解将车内噪声信号分解为相对平稳的IMF分量,再由ANE算法对各个分量进行主动控制,设定不同的声音保留因子,以达到良好的车内声品质,通过采集实车数据与传统ANE算法对比对EMD-ANE算法进行检验.
1 ANE算法
ANE算法是由Kuo等[18-19]提出,在FXLMS算法的基础上发展来的,ANE算法框图如图1所示.图中:x(k)为车外噪声源;P(z)为声传递过程中的初级路径;d(k)为经过初级路径后的期望信号;y(k)为消除期望信号的次级声源;S(z)为次级声源至误差传感器之间的次级路径;S′(z)为次级路径的无偏估计,与FXLMS算法相同;β为声音保留因子,用来控制初始噪声的抵消幅度;xs(k)为经过S′(z)后的滤波-x信号;e(k)为误差信号;e′(k)为虚拟误差,ANE算法根据此值调整权值向量,但e′(k)本身却不反映噪声残差信号.

图1 ANE算法框图Fig.1 Block diagram of ANE algorithm
ANE算法的本质与FXLMS算法相同,属于梯度下降法,W(k)为滤波器权值向量,用以生成次级噪声信号,滤波器的输出信号为
y(k)=x(k)*W(k)
(1)
式中,“*”为线性卷积.
经过声音保留因子β,对输出信号进行一定程度的保留,误差传感器接收到的残余信号e(k)可以表示为
e(k)=d(k)-(1-β)·y(k)*S(z)
(2)
在误差信号e(k)中减去声音保留因子β保留的另一部分输出信号,即得虚拟误差e′(k),可表示为
e′(k)=e(k)-β·y(k)*S(z)=d(k)-y(k)*S(z)
(3)
滤波-x信号为
xs(k)=x(k)*S′(z)
(4)
滤波器权值向量W(k)=[W0(k),W1(k),…,WL-1(k)]自适应更新为
W(k+1)=W(k)+μ·xs(k)*e′(k)
(5)
式中,μ为迭代步长,使W(k)向目标函数的梯度反方向更新迭代一步.μ的选择将影响算法的收敛速度和最小均方误差(SSE).
2 EMD方法
本质上,EMD方法是基于信号自身的时间尺度,将待分析的非平稳信号进行平稳化处理,此处理方法不需要预先给定任何基函数,是完全自适应的过程,适用于处理非平稳信号[20].所以,EMD方法常用于降低汽车噪声信号的非平稳度.
噪声信号经EMD分解后,得到的IMF分量必须满足两个条件:
1) 对于每一个噪声信号的IMF分量,必须满足零点和局部极值点的个数相等或最多相差一个;
2) 在任意时刻,局部极大值点和极小值点形成的上、下包络线的平均值必须为零.
噪声信号采用EMD方法分解的步骤如下.
1) 确定待分解噪声信号x(t)中包含的所有局部极值点,并利用三次样条插值函数分别连接极大值点和极小值点,拟合出噪声信号的上下包络线.
2) 计算出上下包络线的均值m1.
3) 噪声信号x(t)减去均值m1得到一个新的数据序列h1,即
h1=x(t)-m1
(6)
4) 判断h1是否满足IMF分量条件:若满足条件,h1为噪声原始信号的1个IMF分量,可得剩余分量r1为
r1=x(t)-h1
(7)
如果不满足条件,则将h1作为待处理噪声信号,重复上述步骤1)至4),直到h1k满足条件.
5) 将得到的r1作为新的信号序列,重复上述步骤1)至4)的筛选处理,得到第2个IMF分量,重复n次,最终计算出有限个IMF分量和残余分量.
经过上述筛选处理,噪声信号可以表示为

(7)
式中:x(t)为噪声原始信号;cj为噪声原始信号的第j个IMF分量;rn为噪声原始信号的残余分量.
3 车内声品质EMD-ANE算法
以上述EMD方法与ANE算法为基础,首先采用EMD方法对噪声信号进行分解,得到相对平稳的IMF分量;再由ANE算法对各分量进行主动控制,调整每个分量对应的声音保留因子βj;累加得到次级噪声信号y(k).各IMF分量的权值向量由LMS算法统一更新,EMD-ANE算法框图如图2所示.
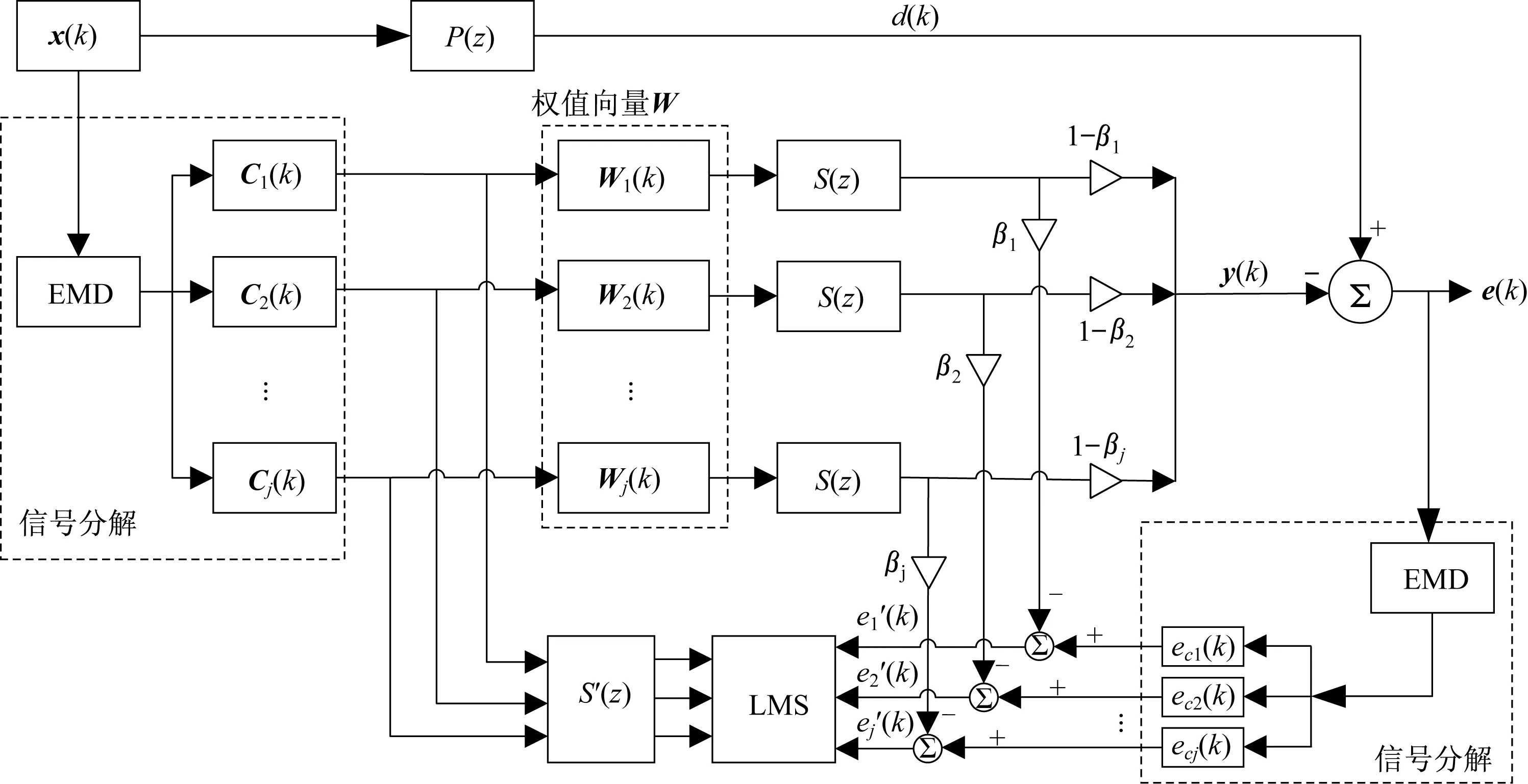
图2 EMD-ANE算法框图Fig.2 Block diagram of EMD-ANE algorithm
图2中,C1(k),C2(k),…,Cj(k)为分解得到的j个IMF分量,公式为
(8)
式中:L为滤波器长度;W1(k),W2(k),…,Wj(k)为滤波器权值向量,用来生成次级噪声信号.滤波器输出信号为

虚拟误差为
滤波-x信号为
Csi(k)=Ci(k)*S′(z)
滤波器的系数自适应更新为
式中:i=1,2,…,j.
4 仿真试验
4.1 车内噪声信号采集与分解
本节对怠速状态下汽车车内噪声信号进行采集试验.试验车辆为国产某品牌家用轿车,在车窗关闭的状态下进行数据采集,如图3所示.采集环境为半消声室内,采集数据为驾驶员右耳处的噪声信号.本次试验采集时间为10 s.为确保采集数据包含原噪声中全部信息,进行数据采集时选择1个较大的采样率,为16 384 Hz.

图3 噪声振动采集现场图Fig.3 Noise vibration acquisition site map
采用EMD方法对噪声信号进行分解,共得到13个IMF分量.各分量的时域波形如图4所示,频谱图如图5所示.

图4 各IMF分量时域波形图Fig.4 Time domain waveform diagram of each IMF component

图5 各IMF分量频谱图Fig.5 Spectrogram of each IMF component
4.2 主动控制结果
以主驾驶员右耳侧噪声作为输入信号,分别应用EMD-ANE算法与传统ANE算法进行主动控制,不断调整算法内部参数,直到控制效果达到最佳,最终确定的参数值见表1.两种算法的控制效果如图6至图8所示.

表1 两种算法参数值Table 1 Parameter values of two algorithms
图6为EMD-ANE算法与传统ANE算法控制效果时域对比图.可以看出,两种算法均可有效控制车内噪声,但EMD-ANE算法稳态误差更小.图7为EMD-ANE算法与传统ANE算法控制效果频域对比图.可以看出,在0~1 500 Hz频带内,EMD-ANE算法的噪声控制效果优于传统ANE算法,具有更好的消噪效果.采用Zwicker方法对两种算法的残余噪声的响度进行计算,结果见表2.

图6 EMD-ANE算法与ANE算法控制效果时域对比图Fig.6 Time domain comparison of EMD-ANE algorithm and ANE algorithm control effect

图7 EMD-ANE算法与ANE算法控制效果频域对比图Fig.7 Comparison of frequency domain between EMD-ANE algorithm and ANE algorithm control effect
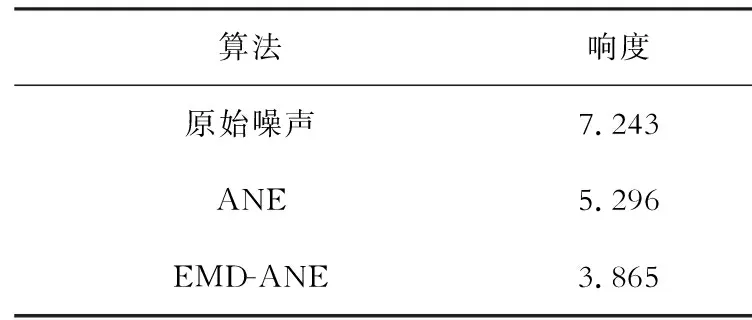
表2 两种算法残余噪声响度Table 2 Residual noise loudness values of two algorithms
从表2中可以看出,EMD-ANE算法的残余噪声响度最低,相比原噪声下降46.64%,而ANE算法的残余噪声响度相比原噪声只下降26.88%,因此,本文提出的EMD-ANE算法较传统ANE算法对车内噪声响度具有更好的控制效果,可更好地改善车内声品质.
5 结 语
本文基于EMD方法与ANE算法,考虑车内噪声非平稳性,提出一种车内声品质EMD-ANE主动控制算法.通过采集实车数据并与传统ANE算法进行对比验证,结果表明EMD-ANE算法的噪声响度更小,响度控制效果较传统ANE算法提高19.76%,更适用于车内声品质主动控制.
