深拖式多道高分辨率地震探测系统在南海首次应用
2020-10-17魏峥嵘裴彦良刘保华
魏峥嵘 裴彦良 刘保华
(①长安大学地质工程与测绘学院,陕西西安710046;②自然资源部第一海洋研究所,山东青岛266061;③自然资源部海洋地质与成矿作用重点实验室,山东青岛266061;④青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室,山东青岛266061;⑤国家深海基地管理中心,山东青岛266237)
1 概况
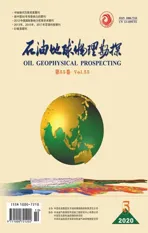
深拖式多道地震探测技术是将震源和水听器阵列通过拖曳于近海底的方式进行波场观测(图1)[1]。由于采用的震源具有较高主频(200~1100Hz)以及近海底的观测方式,避免了信号受海水吸收、海洋混响、环境噪声等的影响,从而可采集得到高品质原始地震资料。目前常用的深拖地震探测装备主要有美国海军研究实验室(NRL)在20世纪80年代研发的DTAGS系统和法国海洋研究所(IFREMER)在本世纪初研发的SYSIF系统。
DTAGS深拖地震探测系统采用赫姆霍兹共振腔震源和48道接收缆阵列[2];后期升级为3m 道间距的24道声学阵列和15m 道间距的24道地震接收阵列,最大作业深度达6000m。震源扫频信号频宽为220~1000 Hz,子波是发射长度为250ms的扫描信号,作业时每隔30s激发一次,震源声源级约200dB[3]。Rowe等[4-5]利用DTAGS系统在北大西洋西部布莱克海岭采集了原始数据并获得高分辨率地震剖面,能清晰地看到表征天然气水合物存在的似海底反射(BSR)。2009年DTAGS系统在日本近海南开海槽甲烷水合物勘探中得到了分辨率高于常规海面拖曳地震的高品质地震剖面[6]。在北Cascadia边缘陆坡天然气水合物勘探中也先后成功地应用了该系统[7-8]。
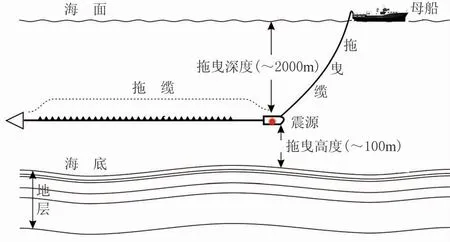
图1 深拖多道地震探测技术示意图
类似地,SYSIF深拖地震探测系统也采用赫姆霍兹共振腔震源和2m 道间距的52道水听器拖缆,作业深度也可达6000m。震源声源级约为196dB,震源子波为50~250ms扫描信号,主频为220~1050Hz。为适应不同的调查船和作业水深环境,可改变SYSIF系统配备的震源型号,频谱和声源级会相 应 改 变[9]。Marsset 等[10]在 浅 水 海 域(310~525m,地中海狮子湾2005 年航次)和深水海域(1100~1700m)分别做了深拖地震与船载浅剖的对比试验。结果表明不论在浅水区还是深水区,深拖地震在(水平和垂直方向)分辨率、穿透深度方面均有明显优势。Ker等[11]在尼日尔三角洲海域做了深拖地震与船载浅剖探测(震源主频约3000Hz)的对比采集,得知深拖地震剖面横向分辨率高于船载浅剖地震。改进型SYSIF 系统最大特点是各地震道均集成了姿态传感器(横摇、纵摇、艏向),施工中可实时监测拖缆形态[12-13]。
随着中国主要海域的水合物资源勘探逐步进入详查和试开采阶段,对海底水合物矿体空间分布的探查精度要求显著提高。海上常规多道地震探测的分辨率明显不足,无法分辨表征水合物矿体存在的地球物理异常,难以满足水合物详查及开采的需要。从2016年开始,由自然资源部广州海洋地质调查局牵头,联合第一海洋研究所及国内相关高校等单位设立国家重点研发计划项目“近海底高精度水合物探测技术”,Kuiyang-ST2000系统即是其子课题“深拖式高分辨率多道地震探测技术与装备研究”的阶段性成果。本文详述了Kuiyang-ST2000系统的总体设计组成、关键参数及特性;应用该系统在中国南海E海域进行了首次海试,所采集数据经处理后得到了高信噪比和高垂向、横向分辨率的成像剖面。
2 深拖地震探测技术优势
地震勘探分辨率即地震波对地质体的分辨能力,可细分为垂向和横向分辨率[14]。垂向分辨率是指探测分辨反射界面间隔Δh的能力,与地震波波长λ有关,据瑞利准则Δh=λ/4,若v 为地震波在介质中传播的速度,则λ=v/f,故垂向分辨率为Δh=v/(4f)。图2表示垂向分辨率与主频的关系。
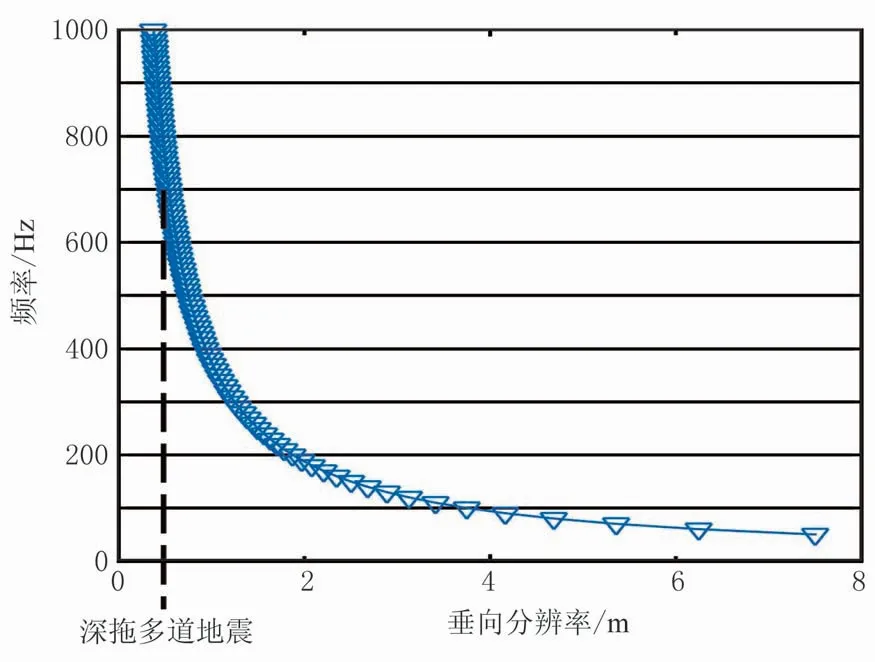
图2 垂向分辨率与主频关系
图3 不同主频时的横向分辨率与拖曳高度的关系
3 Kuiyang-ST2000深拖地震探测系统
3.1 系统组成
Kuiyang-ST2000深拖探测系统主要由拖体和拖缆组成(图4)。拖体上集成了水下控制中心(OCC)和1个姿态传感器(MTI)、等离子体电火花震源、水下声学定位超短基线(USBL)、深度计(depthometer)和高度计(altimeter,测量拖体距海底高度);拖缆主要有前弹段、作业段及挂接阻力伞的尾弹段,作业段包含3.125m间距的48道零浮力数字拖缆,其连接处包含4个姿态传感器(MTI)。
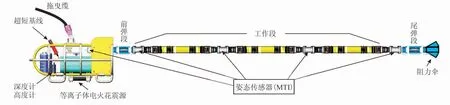
图4 Kuiyang-ST2000系统组成示意图
3.2 深拖震源
Kuiyang-ST2000深拖系统采用等离子体电火花震源[17],该震源具有210dB 声源级、等时/等距激发方式和0~3000J发射能量,最大作业深度为2000m。与压电陶瓷换能器震源、共振腔震源相比,该震源具有声源级高、宽频带和子波低频成分丰富等优势,同时其子波为脉冲波(约1ms),而共振腔震源的连续信号长度为150ms 或更长。Kuiyang-ST2000系统作业时不需延时采集,使每一道都能接收到直达波信号;采用250ms延时采集的DTAGS和SYSIF 系统只有最后3 道能接收到直达波信号[17-18],因而无法直接用直达波和海面反射走时对每一道进行定位。该震源的激发时间间隔最小为1s,远小于共振腔震源(>12s)[19],有利于灵活设计观测系统和提高作业效率。图5显示该震源的子波及其频谱形态。
3.3 深拖拖缆阵列
Kuiyang-ST2000系统的48道深潜拖缆为零浮力缆,其中包括1个前弹段、1个尾弹段和中间3个作业段,各段间由数字传输包(DTU)连接。作业段长度为50m,其中等间距布设4个四通道数字水听器(FDU4),每个FDU4包括4个水听器道,道间距为3.125m。水听器总体动态范围是140dB,灵敏度≥-201d B。具有单炮触发采集和连续采集两种模式。为提升系统模拟信号的解析能力,FDU4采用高精度32位A/D转换器对水听器信号进行数字化。
3.4 姿态控制与实时监测
拖体的设计须考虑它在流体中具有稳定动力学特性,使其横滚、航向、俯仰角度均小于1.3°;拖缆则依靠配备不同直径阻力伞和拖曳速度实现拖缆姿态的稳定性控制。系统还集成了5个姿态传感器实时监测系统拖曳时姿态。其中第1个传感器置于拖体的水下控制中心,主要监测拖体的横滚、俯仰、航向姿态;其余4个传感器分别置于4个数字传输包(各作业段连接处,图4)。姿态数据实时传至控制台,经拟合可实时呈现拖体、拖缆姿态。
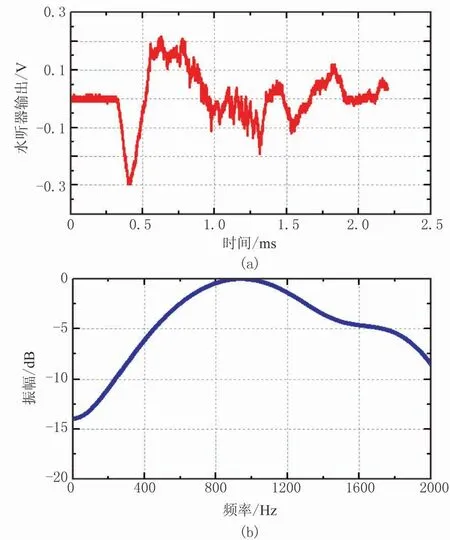
图5 等离子体电火花震源子波(a)及其频谱(b)
4 海上首次实测
应用Kuiyang-ST2000系统于2019年10月在中国南海E 海域进行了首次海上实际数据采集。工区位于琼东南盆地,为新生代被动大陆边缘盆地,处于印度板块、欧亚板块和太平洋板块的接合部[20-21],区内海底地势较平坦。系统拖曳速度为2~3节,炮间距为6.25m,道间距为3.125m,最小炮检距为13m(前弹段),采样率为8k Hz,记录长度为3000ms。
图6 为采集单炮记录(0~230ms)带通滤波(150~1300 Hz)结果。地震记录中主要包含直达波、上行反射波(海底及地层反射波)、海面反射波。由于拖曳深度达1400m,避免了水底多次被、自由表面多次波及微屈多次波等,故干扰波主要有拖船造成的线性噪声,可能存在层间多次波或互层多次波。
4.1 数据处理
由于系统位于水下100~2000m,所以GPS无法对炮—检点进行定位。炮点水平位置采用中心频率为22~30k Hz的水下声学定位系统—超短基线进行定位;炮点深度采用深度计与高度计联合定位。图7为炮点定位深度,图8为拖曳时炮点相对于测线(红线)的平面位置(蓝线)。

图6 部分单炮记录(上图时段为0~300ms,下图时段为1897~1926ms)
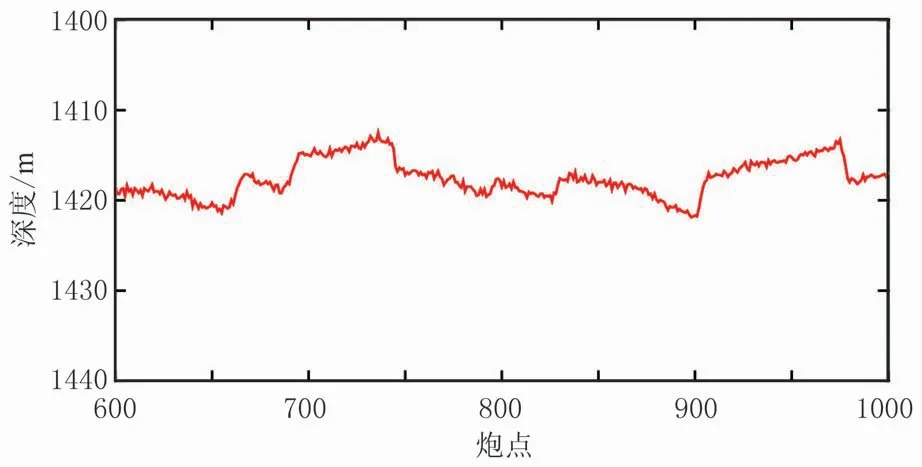
图7 炮点深度
通过拾取直达波旅行时tdirect和海面下行反射波旅行时tssr对水听器进行定位。根据几何原理(图9):若vw为海水中纵波传播速度,取其平均速度为1485m/s,则检波点位置为
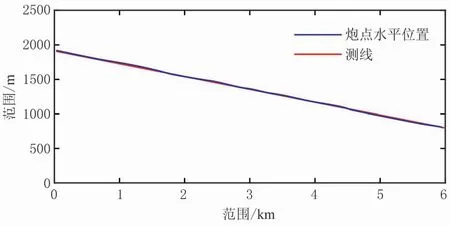
图8 炮点水平位置

式中:dr为检波点深度;ds为震源深度;xh为水平炮检距。
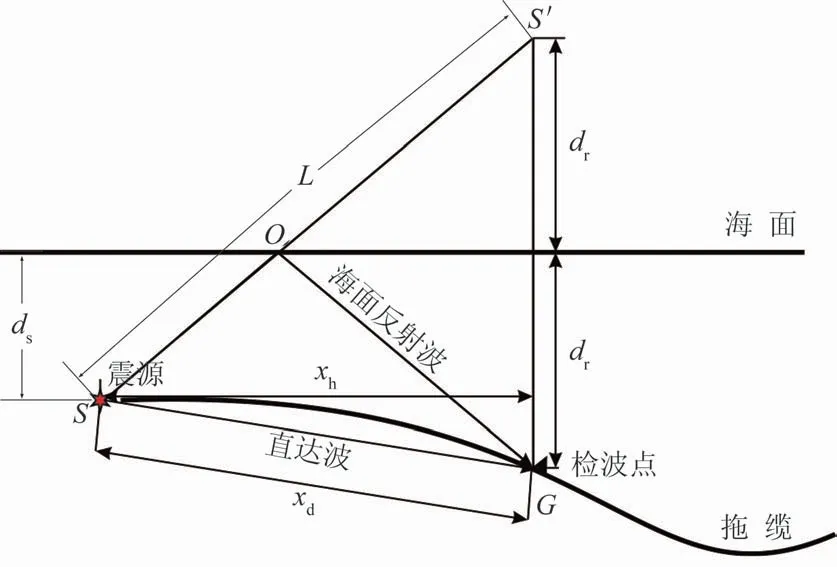
图9 直达波下行反射波定位原理图
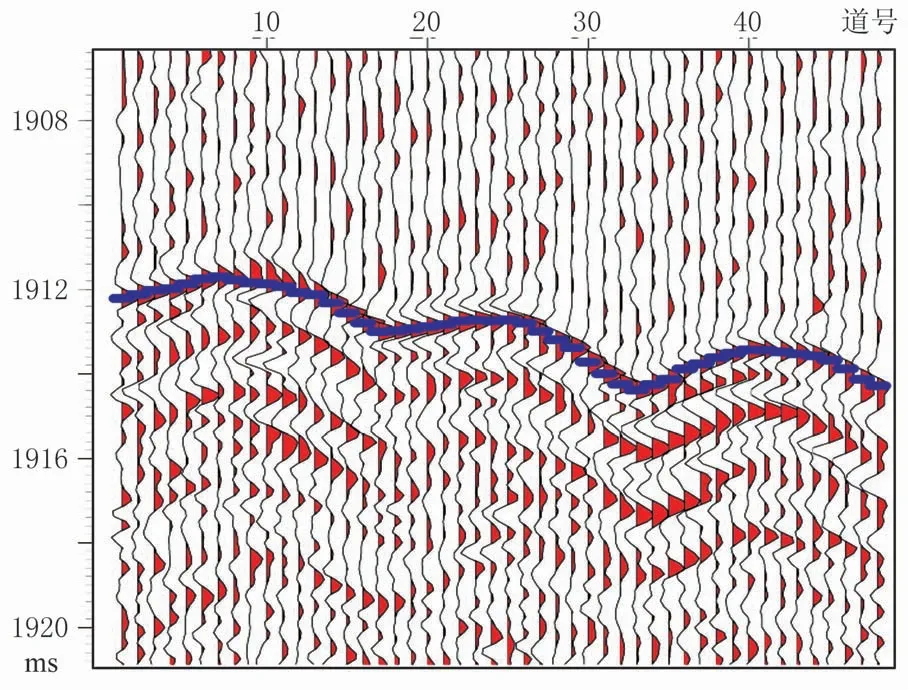
图10 第812炮海面反射波及走时拾取
图10为拾取的海面下行反射波走时,定位结果如图11。确定炮点及检波点位置后,采用图12 所示的数据处理流程,其CMP 面元为1.5m,得到如图13 所示的最终叠加剖面。图14 为图13 剖面1900~2050ms时段的(蓝色框)放大显示,可见数据成像效果较好,具有很高垂向、横向分辨率。
4.2 数据质量影响因素
由于Kuiyang-ST2000 系统探测方式的特殊性,使数据采集及处理受相关因素制约,影响最终数据质量。主要影响因素包括:
(1)震源主频较高,使探测深度难以达到设计要求;震源子波后续存在振荡现象,使数据信噪比受到一定的影响;
(2)在震源及阵列定位方面,因海水速度受诸多因素(如深度、盐度、温度等)影响,在阵列定位计算时海水速度取平均值1485m/s,所以阵列最终定位结果只是炮点的相对深度;由于海面下行反射波部分道存在相位畸变,造成走时拾取的误差,最终导致数据不能同相叠加。
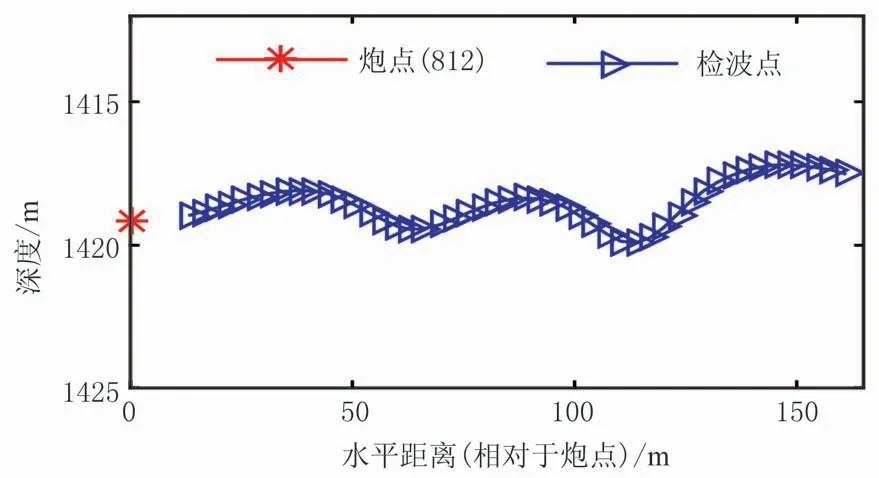
图11 第812炮的拖缆缆阵列定位结果

图12 数据处理流程图

(3)当海底起伏不平时,需收放调整拖曳缆保持拖曳高度小于100m,此过程会导致拖缆无法保持水平姿态,其尾部可能会下沉或上翘;受海流影响,拖缆可能存在左右偏移。目前系统还不能对拖曳姿态进行精确控制。
上述目前尚未解决的问题,将有待于后续研究。
5 结束语
本文详细介绍了Kuiyang-ST2000深拖式多道探测系统的总体设计结构、震源及拖缆等,应用该系统在中国南海E 海域进行了首次实测。相较于常规海洋多道地震,Kuiyang-ST2000 系统特有的高频、高声源级、等离子体电火花震源导致所获数据具有很高垂向分辨率;震源子波为脉冲波,即激发时间间隔小,有利于灵活设计观测系统和提高作业效率;零浮力数字缆能记录单炮或连续采集数据;深潜(近海底100m)方式使系统探测具有很高的横向分辨率。海试数据处理结果验证了该系统的特点。
但任何系统的研制都是阶段性的,其质量和性能也是逐步提高的。因此,该系统在首次海试中表现出的一些不足之处(如震源主频过高、穿透能力弱等),将是后续研究的课题。另外,深拖地震数据的处理方法、流程等尚待进一步研究和完善。