变电站智能巡检机器人系统设计
2020-10-16赵璠璠
赵璠璠
(山西西山蓝焰煤层气有限责任公司, 山西 太原 030024)
1 研究背景
随着电力行业智能化的普及应用,对智能巡检机器人也进行了大力的推广。变电站是连接各个电网的枢纽,变电站的安全运行直接决定了电网的正常运行,因此变电站的巡检工作显得十分重要。以往人工巡检中巡检工人劳动强度大、安全风险高、工作效率低,在恶略天气下巡检还容易出现差错,因此使用智能巡检机器人就显得至关重要。智能巡检机器人具有自主导航定位、检测固定点位、上传数据、自动充电等一系列功能,其主要可以通过红外识别由于电压、电流导致的设备过热等问题,还可以检测到设备运行中出现的超负荷等情况,可以真正实现变电站智能检修方案[1-2]。
2 研究现状
变电站运用智能巡检机器人可以追溯到80 年代,日本率先开展此项工作的研究。1988 年,Jun Sawada 教授研制了一款巡视机器人,主要应用于66 kV 以上光纤复合架空地线。日本三菱公司开发了一款基于轨道交通的500 kV 巡检机器人。2003 年日本学者研制了一款沿轨道行驶的机器人,其具有自行充电、与后台数据交换等功能。2008 年Wail Gueaieb 等人结合RFID 技术对机器人添加定点识别等功能,可以使机器人准确对故障进行定位,完成巡检任务,并且可以通过RFID 对机器人下命令[3-4]。
3 自动巡检机器人硬件设计
3.1 运动模块
本文选取巡检机器人体积较小,动力、制动和传动装置模块化安装。其中轮毂电机选取直流无刷电机,其具有调速平滑、启动性能优越等特点。其中最高转速可达15 000 r/min,最大电流19 A,为保证电机安全配备相关减速机构,方便转速控制,最大输出电流限制为15 A。轮毂转向模块选取步进电机进行转向控制,步进电机具有转向精度高的特点,但其转矩也较小,不适合较大较快转向,因此机器人行走主要在低速、低强度条件下进行。轮毂转向结构如图1所示。本设计选取TMCM-1161 控制器控制步进电机,其额定电流为2.8 A,额定电压为24 V。减速机减速比为15∶1。
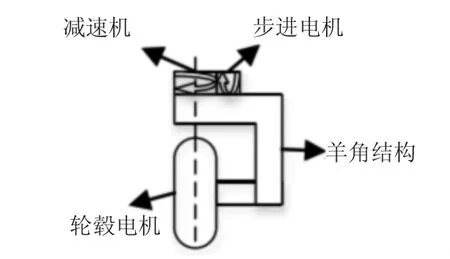
图1 步进电机配合减速机控制的轮毂转向结构
3.2 主控模块
控制系统是机器人行动的核心,本设计选取STM32f407 系列控制芯片,其主要内核为ARM Cortex-M4,具有运行速度快、存储空间大、连接串口多等优点,其最多可设置17 个定时器,拥有16 个优先级,可满足机器人的复杂控制需求。如图2 所示,该开发板具有6 个独立的USART/UART 串口,可利用USB 接口对其进行供电,具有4 个5 V 直流输出,8 个3.3 V 直流输出,足够智能巡检机器人使用[5-6]。
3.3 通信模块
变电站巡检机器人运动过程中需要不断收发信息,其主控模块根据收发到的信息对其他机械机构进行控制运动,因此通信模块显得尤为重要。图3 所示为主控板通信控制示意图。

图2 STM32f407VET6 开发板
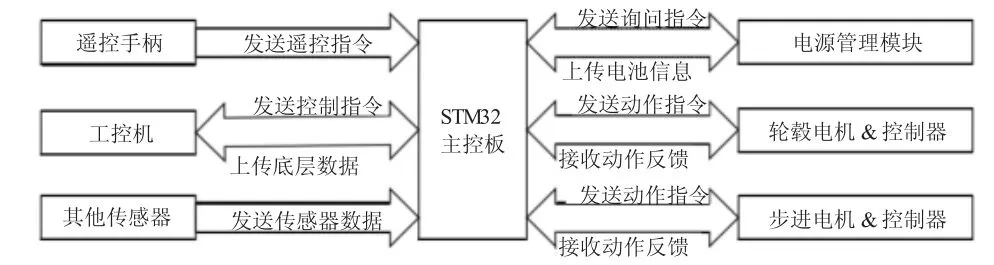
图3 主控板通信控制示意图
本文主控板和工控机之间选取USB 转TTL 协议进行连接,其中USB 总线协议规定当D+>2.8 V、D-<0.3 V 时为高电频,D->2.8 V、D+<0.3 V 时为低电频。工控机根据现场情况向控制模块发出模拟信号,根据控制器解析计算相应的控制量,向步进电机和轮毂电机发出指令,控制相关电机运行。而步进电机、轮毂电机主要是通过RS485 电平进行通信,所以主控板通过TTL 转RS485 模块进行电平转换后与相关设备进行通信。为保证信息传输的准确性和快捷性,将所有设备与一个RS485 模块相连。
3.4 其他模块
本文选取的电源模块为将多个磷酸铁锂电池进行串联,单个电池电压为3.2 V,串联12 个电池后,电源电压为38.4 V,可以满足机器人运动供电。制动模块选取继电器配合急停开关的方式进行制动,在遇到紧急情况下,用继电器动断触点可以完成大电流的切断功能。散热模块,本设计通过在机器人上方开孔的方式增加机器人散热,并在机器人前方安装散热风扇,可以避免过热引起自燃等事故。
4 控制系统设计
保证机器人长时间、高强度运转需要鲁棒性好、误差小的控制策略作为保障。
4.1 轮毂角度适时控制策略
由于巡检地形复杂,行动中环境多变,轮毂在运行过程中可能会因碰撞、摩擦发生偏转,造成运行失步,随着时间累积误差逐渐增大。因此考虑对步进电机添加闭环控制策略。如图4 所示,根据指令选取目标角度与反馈值之差,步进电机根据角度差值除以360°,确定每圈步数,通过减速机进行减速,减速后通过电机进行输出。输出角度通过角度传感器与输入角度进行对比,将差值输入系统,形成闭环,实现轮毂的自动校正。运动指令与目标运动角度之间满足式(1):


图4 角度传感器辅助步进电机的闭环控制
式中:s 为电机需要前进步数,S 为电机每圈的步数,G 为减速机构的减速倍数,θ 为目标运动角度,φ 为当前传感器的返回值,φmax为传感器最大返回值。
4.2 电机运动控制策略
为保证机器人运动平滑,制定一种控制策略避免机器人在启停中因速度突变发生不必要的抖动,以增加机器人安全性,减少机械磨损,减少定位误差。本设计选取的控制策略为S 形控制策略,如图5 所示。
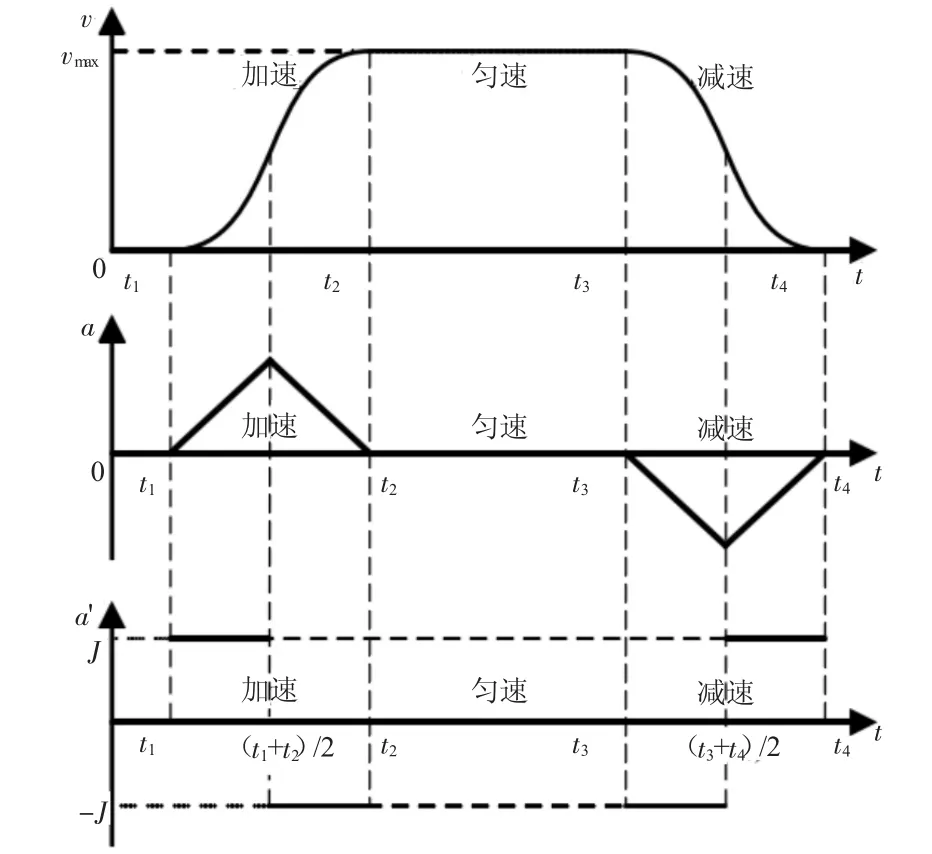
图5 S 形速度平滑控制算法
如图5 所示,可以看出机器人分加速、匀速、减速三个阶段,加速过程中保证加速度对时间的导数为一常数,从而确保机器人加速阶段实现平滑过渡。可以得出式(2):

保证加速度倒数为常数的话,即可得出式(3):

式中:a'为加速度对时间的导数,m/s3;J 为某常数,代表加速度对时间导数的值,m/s3。
通过分析结合实际情况可知,机器人每到一个点需要停下来对故障进行检测,故机器人在一个行程周期内需要多次启停,通过添加控制算法可以使加速度平滑,减少机械摩擦,大大延长机器人的使用寿命。
4.3 通信故障控制策略
主模块和各个分模块间有着自己的通信策略,例如轮毂电机收到主控板的信号后,通过指令校验,开始运转,当轮毂电机与主控板通信发生故障后,主控板未接收到反馈指令,不能判断轮毂电机的运行状态,故机器人会发生错误报警。
基于上述问题,本文提出一种通信故障时的控制策略,如图6 所示。

图6 通信失败的诊断与应对策略
可以看出在中断响应后下发指令进行询问,接受到反馈信号后,判断其校验是否合法,若合法则计数器计0,判断为无故障,若不合法,则计数器加1;判断计数器数值是否超过阈值,若超过则采取应急措施,对机器人进行紧急停止,并上传故障信息,若没超过则判断机器人可以继续运行。
5 结论
本文针对变电站复杂的运行情况,设计了智能化自动巡检机器人,其硬件设备包括运动模块、主控模块、通信模块、电源模块、制动模块等。各个模块结合良好,通过控制系统运行流畅。针对轮毂转向的控制系统,可以保证轮毂多次转向后没有位移误差;针对机器人运动启停运动控制系统可以保障机器人顺畅运转,避免机械摩擦过多导致机器人寿命降低;主要针对运行中出现通信故障问题,通信故障控制系统使机器人及时停止运行,保障机械安全。
