一种基于虚拟输入的自动驾驶仪系统极性测试方法研究
2020-10-15左艳辉李永强朱倩倩
左艳辉 ,李永强 ,朱倩倩 ,童 琴
(1.中国人民解放军海军装备部驻武汉军事代表局驻南昌地区航空军事代表室,江西 南昌,330024;2.航空工业洪都,江西 南昌,330024)
0 引言
自动驾驶仪系统极性测试是飞行器测试项目中的一个重要内容,是每架飞行器装配完成后必须验证的测试项目。自动驾驶仪系统极性测试作为一种定性测试,被测对象为导航系统、控制系统和伺服系统的极性。导航系统、控制系统和伺服系统是自动驾驶仪制导控制系统的关键部分,直接影响飞行器飞行的稳定性和制导控制系统的制导精度。如果导航系统、控制系统和伺服系统中任一系统的极性发生错误,将直接导致飞行器飞行失控。飞行器在空中飞行时,自动驾驶仪根据惯导系统获取的姿态变化,通过控制系统中的制导律解算出相应的控制命令并发送伺服系统,控制舵面产生相应的偏转,以保证飞行器的平稳飞行。自动驾驶仪系统极性测试就是模拟该过程,将飞行器固定于三轴转台上,通过控制旋转转台的三个维度,即产生飞行器姿态的变化,根据惯导系统测得的姿态变化,制导律解算出相应的控制命令并发送伺服系统,最终控制舵面的偏转。根据惯导系统、制导律、伺服系统的输入输出,测试设备判定自动驾驶仪的系统极性是否正确。测试时,为提供飞行器的姿态变化,需配备三轴转台,而三轴转台的价格昂贵,且体积大质量重,并不适合在外场和部队阵地等机动场合下使用。
1 系统极性测试现状
目前,因转台的缺陷,在外场和部队阵地,几乎所有飞行器均不具备测试自动驾驶仪系统极性的条件。除非在测试时使用固定比例系数或另一算法替代真实制导律的解算,以实现系统极性测试。尽管真实制导律在设计时已做过实物或半实物仿真试验,其合理性已得到充分论证,但是从测试性的角度来说,这种为测试而增加模拟被测对象以替代真实被测对象的做法显然是不符合测试原则的。
2 自动驾驶仪系统极性测试机理分析
制导控制系统主要由导航系统和控制系统组成,在不考虑干扰时,其系统组成如图1所示。
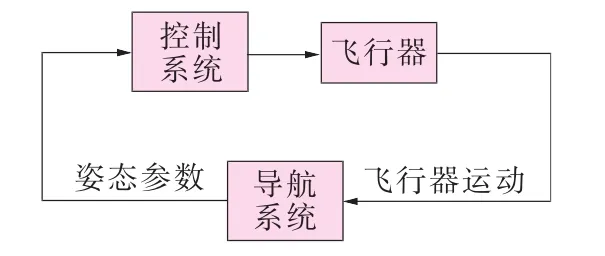
图1 制导控制系统组成框图
系统极性测试的被测对象实际就是飞行器制导控制系统中的导航系统和控制系统的极性,具体包括惯导系统、控制系统、伺服系统本身的极性以及硬件装配的正确性。
2.1 惯导系统极性测试
惯性导航系统是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统。通常由惯性测量组合和导航计算机两大部件组成,其中惯性测量组合包括陀螺仪和加速度计。陀螺仪是角运动的测量装置,三个陀螺仪用来测量载体的三个转动通道的运动角速率,通过积分三个转动通道的运动角速率,可获取运载体的姿态角信息;加速度计是位置的测量装置,三个加速度计用来测量载体的三个平移运动方向的加速度,通过积分该三个平移运动方向的加速度可获取三个平移运动方向的速度和位置信息。
在装前单元测试和系统极性测试中,将惯导的陀螺仪或飞行器固定于三轴转台上,通过控制旋转转台的三个维度,即产生飞行器姿态的变化。惯导系统根据三个陀螺仪获取的三个转动通道的角速率,通过积分,可获取飞行器的姿态角信息。
2.2 控制系统极性测试
飞行器控制系统最基本的功能是保证飞行器在每一飞行段稳定地飞行,所以也常称为“稳定回路”。稳定回路作为制导控制系统大回路的一个环节,本身也是闭环回路,而且可能是多回路,而稳定回路中的执行机构通常也采用位置或速度反馈形成闭环回路。
控制系统回路是由自动驾驶仪与飞行器机体构成的闭合回路。其主要作用是稳定飞行器绕质心的姿态运动,并根据控制指令操纵飞行器飞行。一般控制回路可解耦成滚转控制回路和纵侧向控制回路。其中滚转控制回路的基本任务是消除干扰作用引起的滚转角误差,为了稳定飞行器的滚转角位置,要求滚转稳定回路不但是稳定的,稳定准确度要满足设计要求,且其过渡过程应具有良好的品质。典型的滚转通道稳定回路如图2所示。
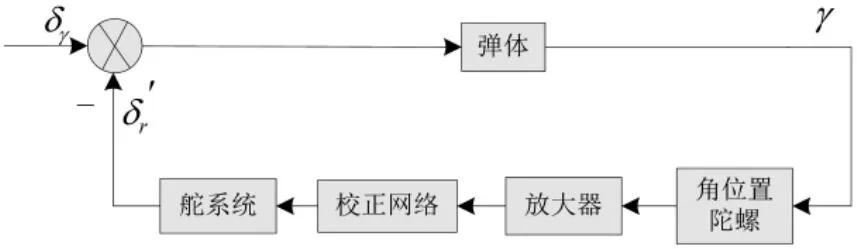
图2 具有角位置反馈的滚转角稳定回路
图中:δγ为舵偏角;γ为滚转角。
从图2可以看出,由舵系统输出的δ′γ以负反馈的方式参与至稳定回路中,以控制弹体的姿态稳定。在控制回路中,如果舵系统输出的δ′γ以正反馈的方式参与,将导致稳定回路的发散。而对控制系统的极性测试,就是对制导律解算出的舵系统控制指令的极性进行测试。
2.3 伺服系统极性测试
伺服系统功用是根据输入信号的极性和大小,按比例地操纵飞行器的摆动发动机、舵面、可动喷管或扰流片的偏转角度,从而产生一定的控制力或力矩,控制飞行器的运动和姿态。操纵舵面的舵系统,当舵面发生偏转时,流过舵面的气流将产生相应的空气动力,并对舵轴形成气动力矩,通常称为铰链力矩。铰链力矩是舵机的负载力矩,与舵偏角的大小、舵面的形状及飞行的状态有关。为使舵面偏转到所需的位置,舵机产生的主动力矩必须克服作用在舵轴上的铰链力矩及舵面转动所引起的惯性力矩和摩擦力矩。
对伺服系统的极性测试,就是向伺服系统的舵机发出正向及负向测试信号,舵机根据该信号输出一个带极性的控制信息,控制舵面偏转,舵面的偏转运动方向及其反馈信号的极性应符合飞行器控制系统的既定要求。
在伺服系统装前单元测试中,就已对舵机极性进行过验证,在装后系统测试中,测试的主要目的是检查伺服系统的装配正确性。同时根据舵机输入输出信息,也可以判定舵机的极性是否符合要求。
飞行状态下的飞行器在伺服系统动作了之后,机体应该具有相应的姿态调整。而实际上,进行系统极性测试时,飞行器姿态并不受伺服系统的控制,即图2中的δγ和δ′γ并未引入至回路中,所以在做该项测试时,飞行器在舵机和舵面发生变化而姿态未发生变化时不应上报故障。
3 基于虚拟输入的系统极性测试方法
3.1 测试方法的设计
鉴于转台的种种缺陷,本文设计了一种基于虚拟输入的自动驾驶仪系统极性测试方法。
根据上一章节的分析,除制导律以外,其它系统均已在飞行器总装前做了相应测试,而制导律也在装前做过相应的仿真试验。通过装前测试和仿真试验,能确保各系统软硬件在装前符合各项技术指标。因此,总装后的系统极性测试主要目的之一就是验证惯导系统、控制系统和伺服系统的装配的极性正确性。
进行惯导系统极性测试时,需转台为其提供原始输入,控制导弹在三维空间内旋转,产生姿态的变化,再由惯导系统的陀螺仪测量飞行器姿态的变化,以作为控制系统的输入。如果在此过程中,通过测试设备向飞行器输入一个虚拟的固定姿态角或姿态角速度,参与至控制系统的制导律解算,再由真实的制导律解算出相应的伺服系统控制指令,伺服系统收到控制指令后,舵机进行相应的响应,控制舵面发生相应的偏转。此过程中,惯导系统并未参与至系统极性测试中,所以不能判断惯导系统的极性是否正确;而根据舵机和舵面的输出与预先设定的技术要求进行对比,判断出控制系统和伺服系统的极性是否正确。
3.2 可行性论证
3.2.1 可操作性分析
在实际操作过程中,可以在测试通讯协议中设计一自动驾驶仪系统极性测试指令。当飞行器收到该指令时,控制系统通过硬件或软件的方式切断与惯导系统的通讯,而将该通讯端由测试设备来替代,接收并认可来自测试设备的飞行器姿态角或姿态角速度,自动驾驶仪以此作为飞行器的姿态信息参与制导律解算。
在设计飞行器控制系统软件时,对来自测试设备的飞行器姿态信息优先级高于来自惯导系统的姿态信息,如此,则不管飞行器处于在测试状态还是飞行状态,飞行器如果只接收到来自惯导的飞行器姿态信息,则只使用该信息参与制导律解算;如果同时收到来自测试设备的姿态信息和来自惯导的姿态信息,则优先使用来自测试设备的姿态信息,也就意味着测试时不需要对硬件进行任何的切换。
3.2.2 影响分析
此方法的缺点是未对惯导系统的装后极性进行测试。实际上,飞行器总装前,惯导系统的任何单一维度极性就已做测试并获得确认。对惯导系统进行的装后极性测试,主要目的是确保惯导系统三自由度装配的正确性。针对该问题,可采用定位装置、防差错设计等结构方法,确保惯导三维度不出现安装错误的情况,以此保证惯导系统装后极性的正确性。
对控制系统来说,只要将控制系统的软硬件按上一章节的操作方法进行更改,制导律就可以将虚拟的姿态信息参与至解算中,不会影响制导律的解算过程,也就确保了制导律的解算过程完全还原。
因为从制导律开始,就保证了过程的还原,所以在伺服系统的舵机和舵面也同样地还原了相应的响应过程。
此方法注入的虚拟姿态角或姿态角速度是一个定值,而真实情况下飞行器姿态角和姿态角速度的变化不可能是阶跃变化。测试时,模拟输出的姿态信息是阶跃变化的定值,因为制导律是虚拟的固定比例系数或某一替代算法,有可能导致舵面的偏转角度过大,超出舵偏角最大量程。因此测试设备注入的虚拟姿态角或角速度与初始值之差不宜过大。事实上,一般制导律都会对舵机的动作进行限幅,所以,如果使用真实制导律参与系统极性测试,可避免该问题的出现。而使用真实制导律参与自动驾驶仪的系统极性测试也不存在任何技术问题,只需模拟各种的制导律输入参数即可。
4 结语
本文根据系统极性测试现状和系统极性测试机理,针对飞行器自动驾驶仪的系统极性测试需配备转台价格昂贵、不便转移等问题,提出了一种基于虚拟输入的飞行器自动驾驶仪系统极性测试方法。该方法通过测试设备向飞行器输入一个虚拟的固定姿态角或姿态角速度,参与至控制系统的制导律解算,再由真实的制导律解算出相应的伺服系统控制指令,伺服系统收到控制指令后,舵机进行相应的响应,控制舵面发生相应的偏转,根据航机和舵面的输出与预先设定的技术要求进行对比,判断出控制系统和伺服系统的极性是否正确。通过从可操作性和影响分析两方面进行论证,证明该测试方法具有可行性。