某型飞机前襟伺服阀电流环回路仿真分析
2020-10-15万民天江建东
郭 丹 ,邹 庆 ,万民天 ,江建东
(1.航空工业洪都,江西 南昌,330024;2.空装上海局驻南昌地区军事代表室,江西 南昌,330024)
0 引言
前襟驱动系统是飞机飞行控制系统中的辅助操纵系统,用于改善气流在机翼前缘的流场,提高气流在机翼前缘分离的迎角,改善飞机大迎角升力特性。前缘襟翼的偏度也能按给定的控制律自动地随飞机迎角和飞行马赫数的变化而变化,具备改善飞机性能或操纵品质的功能。
某型教练机在飞行控制系统地面上电或退出PBIT进入实时任务时,出现多架次前襟伺服机构振动故障。通过故障定位及分析,确定引起系统振动的原因为前襟伺服阀电流环回路振荡。本文利用AMESim软件建立了前襟伺服阀电流环回路的模型,并对模型的正确性进行验证;利用Matlab软件对伺服阀电流环回路进行动态仿真,分析前襟伺服阀电流环回路参数对系统稳定性的影响。
1 建模分析
某型教练机前缘襟翼由四块组成,左右各两块。每块前襟均由伺服控制板(集成在飞控计算机内)、前襟伺服机构、作动筒及集成在作动筒内的位置传感器组成的驱动系统控制。系统接受控制律计算输出的指令信号,驱动前襟舵面偏转。集成在作动筒上的前襟位置传感器将舵面位置反馈给伺服控制板,实现前襟系统闭环控制。
前襟伺服控制回路采用经典控制回路,仅设置了前向增益环节,该控制方式在各型号飞机中广泛采用,具有良好的稳定性,如图1所示。蓝框内为前襟伺服电子框图,它将来自计算机的控制指令与前襟作动器位置反馈相综合,经放大、限幅后,通过伺服阀驱动电路(红圈),将电压信号按照1mA/V的等比例关系转换成对应的电流信号,驱动伺服阀工作。

图1 前襟伺服控制回路框图
2 仿真分析
2.1 问题描述
某型高级教练机在飞行控制系统地面上电或退出PBIT进入实时任务时,前襟伺服机构出现高频振动。对飞控系统上电和退出PBIT进入实时任务时的指令状态进行梳理,发现故障诱因为:系统上电时,伺服板的指令信号为10V的阶跃信号;退出PBIT转入实时任务时,伺服控制板的指令信号为-10V~0~-10V(时长145ms)的脉冲信号,信号曲线如图2所示。
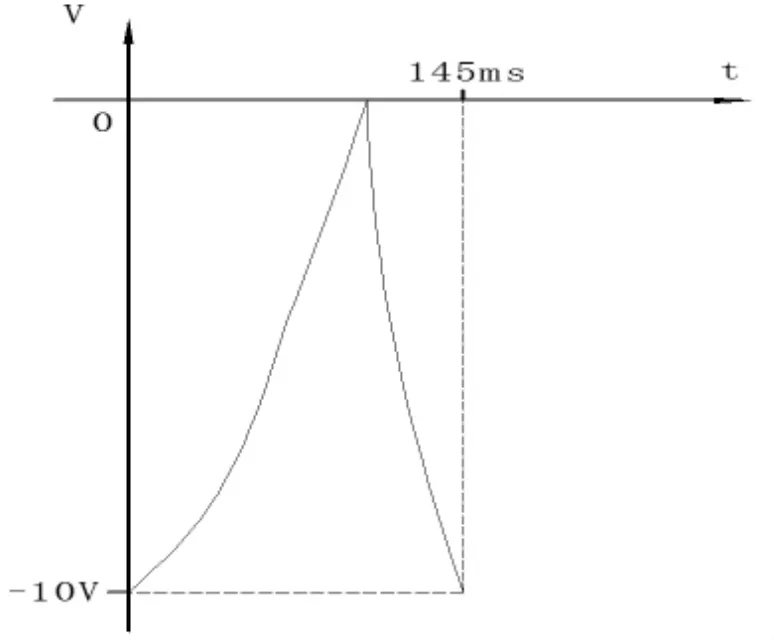
图2 PBIT转实时任务脉冲信号
因此,在进行仿真分析时,将系统输入信号模拟为相应的阶跃信号。
2.2 前襟伺服回路动态特性分析
对前襟伺服回路进行动态特性仿真,系统频带约为9Hz,满足≥4Hz的要求,系统稳定性良好。
2.3 一阶伺服阀电流环动态特性分析
根据伺服阀的特性参数,在输出级接阻抗为350Ω、感抗为2H的仿真负载,对整个伺服阀电流环进行扫频仿真。
从图3、图4可以看出,在接入伺服阀负载环节后,伺服阀电流环的动态特性发生变化,幅频特性的截止频率为190Hz,远远高于伺服机构实际要求的工作频带(60Hz~100Hz),而且在 50Hz~140Hz内幅频出现了超调,稳定性相对变差,增大了激发伺服阀振荡的可能性。

图3 伺服阀电流环带负载幅频结果
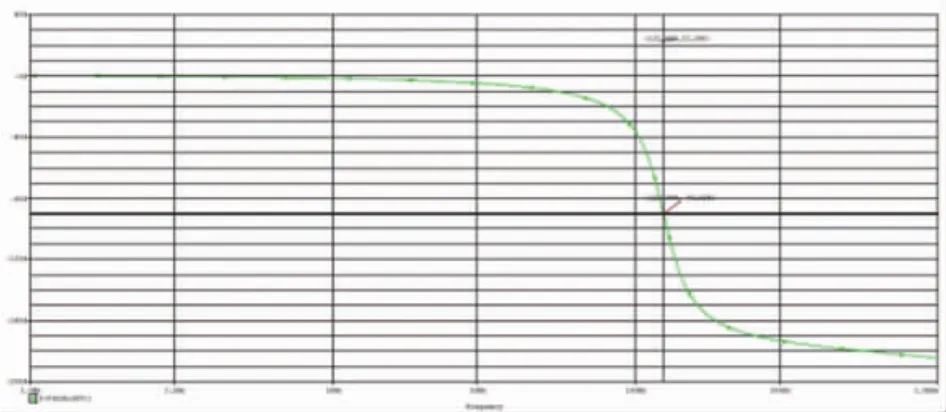
图4 伺服阀电流环带负载相频结果
对接入一阶环节阀模型负载的伺服电子模型施加阶跃信号观测伺服阀电流环的动态响应,观测其稳定性。
从图5仿真波形可以看出,尽管接入一阶环节伺服阀模型后的动态稳定特性相对变差,但对大幅值阶跃指令输入的电流环特性是稳定的,不会导致伺服阀电流环振荡。

图5 伺服阀电路阶跃响应仿真图
通过试验测试发现:断开伺服电子的前级输入,直接给伺服阀施加阶跃信号,出现振动的伺服阀有10%左右的超调,而正常的伺服阀基本无超调或超调很小。如果伺服阀模型仅是电阻和电感串联的一阶环节,是不会存在超调的,因此振动的伺服阀模型实为二阶环节。
2.4 二阶伺服阀电流环回路动态特性分析
前襟伺服阀电流环回路由前襟控制板上的电流环回路和伺服机构组成,前襟伺服阀电流环回路对控制指令与位置反馈综合,将其差值信号放大,按1mA/V的等比例关系转换成相应的电流信号,驱动伺服机构中的伺服阀工作,伺服阀线圈电流的采样电压作为反馈构成伺服阀电流环。
为了尽可能真实地模拟前襟伺服机构的物理特性,按实际装机状态建立伺服阀电流环回路AMESim模型(见图6),进行时域仿真,仿真曲线如图7所示,其中阶跃信号为指令信号,振荡信号为相应曲线。
从仿真曲线可知,在大幅值阶跃指令作用下,伺服阀电流环回路发生了振荡,振荡频率为100Hz左右,这与发生振动时的实测信号频率基本一致,与实际情况相符,验证了模型的准确性。
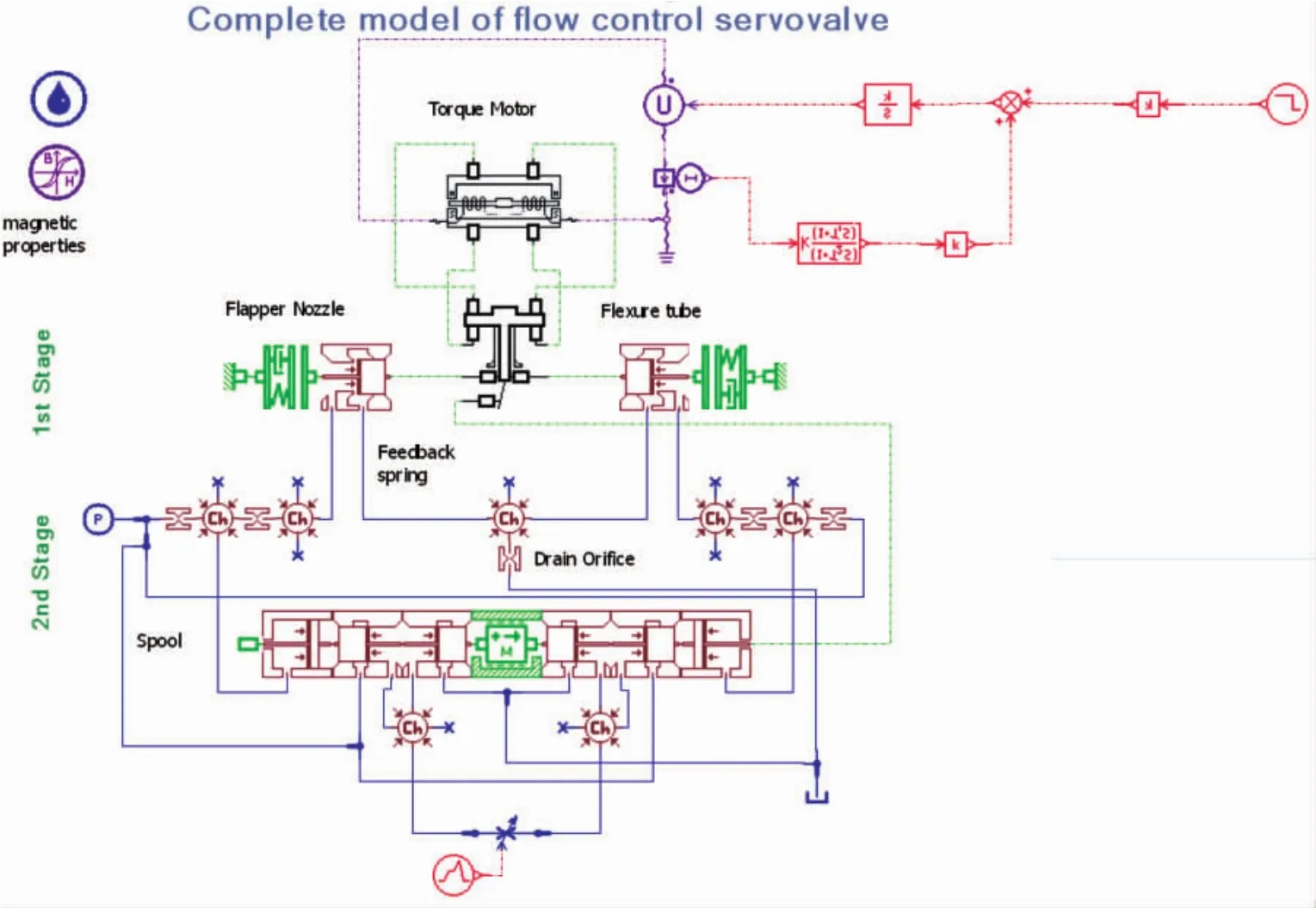
图6 伺服阀电流环回路AMESim仿真模型

图7 时域响应曲线
将伺服阀的模型等效成电阻、电感和电容的组合,伺服阀电流环回路的控制框图如图8所示。

图8 伺服阀电流环控制框图
对伺服阀电流环回路进行Matlab动态特性仿真,从开环相应波特图(见图9)可知,前襟伺服阀电流环回路的幅值稳定裕度约为158dB,相位稳定裕度约为18.3°,伺服阀电流环回路的相位裕度较小,稳定性较弱,容易产生振荡。
图9 伺服阀电流环回路开环相应波特图
2.5 二阶伺服阀电流环回路优化
前襟伺服回路的频带为4Hz左右,根据设计经验,将前襟伺服阀电流环的截止频率约束为120Hz,根据此参数和伺服阀线圈参数,按照相关的设计公式,对伺服阀电流环回路中的电容进行参数更改,将其扩大15倍。对更改参数后的伺服阀电流环进行稳定性仿真分析,更改后的相位裕度为60°(见图10),稳定性显著提高。
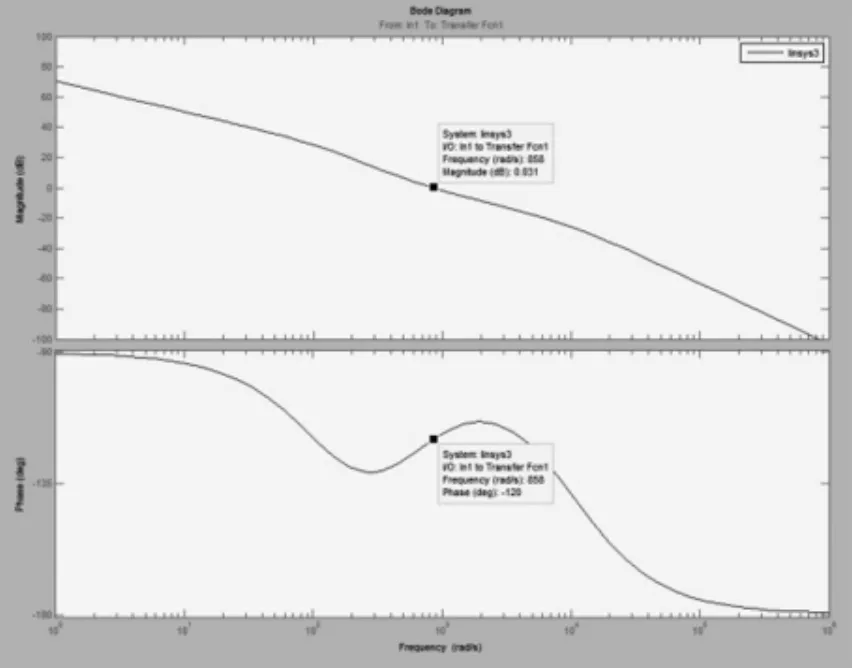
图10 优化后伺服阀电流环稳定分析
对更改参数后的前襟系统进行稳定性仿真分析,伺服系统的稳定裕度为76.2°(见图11),满足系统稳定裕度要求。
3 结语
某型教练机在飞行控制系统地面上电或退出PBIT进入实时任务时,出现多架次前襟伺服机构振动故障。经过AMESim和Matlab建模仿真分析,前襟伺服系统是稳定的。而振动的伺服机构模型实为二阶环节,前襟伺服阀电流环回路的振荡会引起伺服机构振动。通过更改前襟系统伺服阀电流环回路参数,可以提高回路的稳定裕度,有效抑制振动的产生,且保证系统的动静态性能指标满足要求。

图11 优化后伺服系统的稳定裕度