四自由度3T1R双输出3D打印解耦并联机器人设计
2020-10-14陈金舰
陈金舰


摘要:传统的四自由度3T1R双输出3D打印解耦并联机器人构件精密度差,很容易产生尺寸误差。针对上述问题,设计了一种新的四自由度3T1R双输出3D打印解耦并联机器人,该机器人由计算机、控制器和执行元件三部分构成,采用双输出3D打印在并联机构的基础上,提出四自由度3T1R并联机构,该结构可以在x、y、z三维方向上移动,并绕y轴方向转动,能够对3D打印机器人进行双打印,根据设计的机器人结构设计运动性能,分析不同支链在x、y坐标平面内投影的位置分布方式。为检测机器人工作效果,设计对比实验,结果表明,给出的机器人构件精密,尺寸误差小,具有很高的工作能力。
关键词:四自由度3T1R;双输出3D打印;并联机器人;解耦并联
中图分类号:TP391.9 文献标志码:A
文章编号:2095-5383(2020)03-0016-05
Abstract:The traditional four-degree-of-freedom 3T1R dual-output 3D printing decoupled parallel robot has poor precision and is easy to produce dimensional error. In order to solve the above problems, a new four-degree-of-freedom 3T1R dual-output 3D printing decoupled parallel robot was designed. The robot is composed of three parts:computer, controller and actuator. Based on the parallel mechanism, a four-degree-of-freedom 3T1R parallel mechanism was proposed. The structure can move in the three-dimensional direction of x、y、z and rotated around the y axis direction. It can double print the 3D printing robot. According to the designed robot structure, the motion performance was designed and the position distribution of different branch chains in the x、 y coordinate plane was analyzed. In order to detect the working effect of the robot, the comparison experiment was designed. The result shows that the new type of robot component has precise components, small dimensional errors, and high working capacity.
Keywords:four degrees of freedom 3T1R; dual output 3D printing; parallel robot; decoupled parallel
与串联机构相比,并联机构是一类新型机构,具有刚度相对较强、动态性较高、惯性相对较小、承载能力较高等优点。并联机构最初研究时具有6个自由度,但随着研究的深入,为应对不同的应用场合,并联机构的自由度逐渐减少,少自由度并联机构得到了发展[1]。解耦是一种解决并联机构现存耦合性较强但控制较难等问题的方法,解耦并联机构是满足一对一存在于输入输出之间的线性映射关系。四自由度解耦并联机构是基于螺旋理论,实现空间的一维移动和三维转动,对机构进行支链结构特性的自由度分析,根据自由度计算公式验证机构的运动特征,对机构工作奇异性和输入输出关系进行完全解耦分析。本文应用的四自由度解耦并联机构具有控制简单、稳定性好、解耦完全等优势[2]。
3D打印技术是借由计算机作为辅助,对实体模型进行设计和建立,利用标准模板库文件,对模型进行分层转化,每层界面高度为固定值。以命令代码对机器运动进行控制,实现实体的逐层打印。随着3D打印设备和材料的不断创新和发展,3D打印成品的精度和成型速度不断提高。3D打印技术在当前已广泛应用于医疗、航空等领域[3]。
根据实际需求,对四自由度3T1R双输出3D打印解耦并联机器人进行设计,将并联机器人结构与运动进行分析,并通过实验对四自由度3T1R双输出3D打印解耦并联机器人的可行性进行验证。
1 四自由度3T1R双输出3D打印解耦并联机器人结构设计 双输出3D打印解耦并联机器人是利用一套控制器的输出信号对电机的输出速度进行控制,采用驱动关节进行共用驱动,将2个相同的物体进行一次性打印完成,同时还能防止二次加工时干涉情况的出现,能够有效提高工作效率和节约产品成本[4]。
按照打印設备、打印材料以及打印成型方式的不同,可以将3D打印技术分为熔融层积成型(FDM)、选择性激光烧结(SLS)、立体平板印刷(SLA)等技术。与3D打印机串联机构相比,运用并联机构进行3D 打印机器人制作,其体积小、价格便宜,且能适用于家庭办公。
传统大部分3D打印机器人的打印头只有固定姿态,但是打印产品的表面并不会全部垂直于打印头,在进行单向分层3D打印时,打印台阶会出现不光滑的现象,从表面精度和光滑度上影响产品质量。当进行零件3D 打印修复时,打印头姿态不能改变,可能会直接干涉工件,零件增加几何特征时较为困难[5]。打印方向会决定材料特性,打印产品的力学性能具有方向性[6]。
采用双输出3D打印,机器人在x、y、z三维方向上移动,并能够绕y轴方向转动,实现四自由度3T1R并联机构,能够利用1台3D打印机同时进行2个相同物体的打印。并且,本文设计的3D打印机器人能够通过改变喷头运动方向,对物体进行倾斜打印,提高物体表面打印精度[7]。
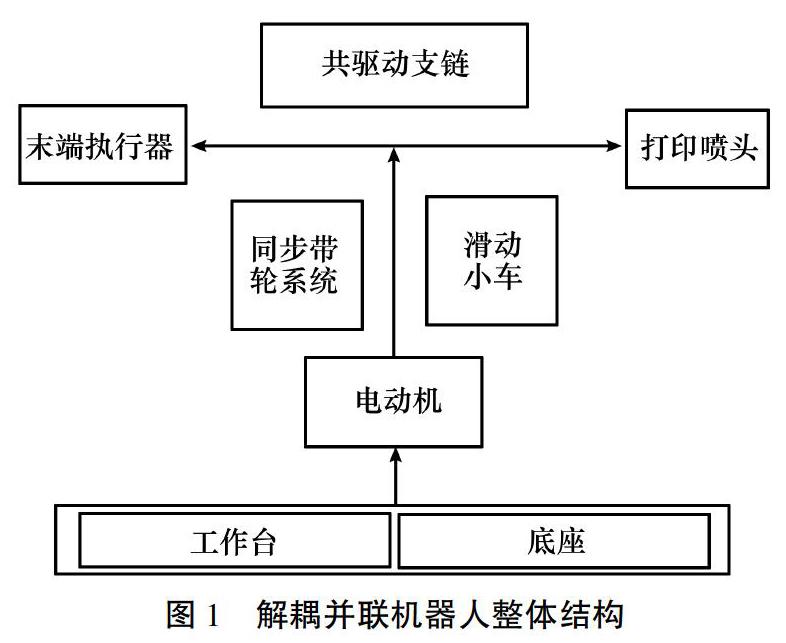
如图1所示,四自由度3T1R双输出3D打印解耦并联机器人是由工作台、底座、同步带轮系统、共驱动支链、末端执行器、电动机、滑动小车和打印喷头组成。如蜘蛛一般,3D打印机器人具有八个共驱动支链,同步带轮系统由电动机驱动,将安装有运动支链的滑动小车带动,进行机器人的驱动[8]。
3D打印耦合并联机器人是由计算机、控制器和执行元件3部分构成,如笛卡尔机械一般,能够沿x、y、z 3个坐标直线方向移动,如图2所示。在计算机部分主要包括CAD 辅助设计和分层控制软件,控制器部分包括控制器主板、电机控制器和接口拓展板,执行元件部分包括供料和驱动电机,温度、位置和进度的反馈器[9]。电机作为动力输出,具有较高的运动准度,打印喷头将加热后的半流体状的塑料丝挤出,通过计算机控制支链的规律运动,将规则薄膜进行分层堆积,得到所需物体。控制器主板采用的是单片机,其具有成熟的固件编译系统,应用限制小,适用较为广泛。得到的并联机器人,如图3所示。
并联机器人接口拓展板可以通过USB 端口与计算机进行连接通信,同时也可以通过蓝牙进行无线通信[11]。
解耦并联机器人以动平台作为承载打印头的载体,控制器通过对支链的控制,带动动平台上的打印头运动进行产品打印,如图4所示。利用并联机构的特殊性,使用同一套控制装置,对多条运动一致的运动支链进行驱动,完成双输出3D打印。
2 四自由度3T1R双输出3D打印解耦并联机器人运动性能设计
建立分支坐标系,以螺旋形式对3T1R双输出并联机器人的运动支链进行分析。
根据运动螺旋和约束螺旋之间存在的互易关系,对各支链的反螺旋力偶进行求解,进而求得所有支链力偶矢量组成的矩阵的最大线性无关组,由矩阵的秩可知约束螺旋系为两力偶,会对x和y轴方向的转动进行约束,也就是说,该机构会绕y轴转动并沿x、y、z方向移动,具有4个自由度[12]。
将3T1R并联机构中的各支链在对应坐标平面内进行投影,以支链1为例,如图5所示,对机构驱动关节的位置分布进行分析,求解机构的位置反解。由于机构是解耦的,机构的驱动关节的位移量只分别与x、y、z轴方向有关,为纯约束力[13]。当动平台不发生转动时,z轴方向上的驱动只会与z值相关。
在任何情况下,并联机构的线性无关约束力偶不存在相关性,当机构支链运动到某个位置或机构动平台运动到某一特定位置时,机构会出现奇异性,其自由度会发生缺失。在实际工作中,在进行倾斜平面打印时,3D打印机器人需要进行旋转,将使动平面与倾斜平面平衡,规划打印轨迹。机器人打印喷头可以对倾斜表面以圆周形式进行打印运动,如图6所示。
3D打印技术利用计算机辅助设计软件,将三维造型转化成文件导入到分层控制软件,对模型空间结构进行分层,生成代码指令,对打印设备工作进行控制,去除工件支撑,完成表面处理,得到原型件,如图7所示。
3D打印对内部结构复杂的工件进行生产加工时具有较强的优势,尤其是本文中以并联机构为主要构型的3D打印并联机器人,能够高效率进行目标工件的生产加工[14]。
传统3D打印技术的串联机构中,将驱动电机安装在x、y、z轴的驱动块上,其惯性很大,不利于3D打印运动的瞬时性,会增大构件的误差。充分考虑打印精度、速度等因素,有利于优化3D打印机器人,并对机构运动进行精确控制。双输出3D打印解耦并联机器人的建立能够满足构件的大批量需求,在承载能力、运动精度、动态性能、灵活性和使用时间上都有所优势[15]。
并联机构的支链理论上之承受拉、压两力载荷,并且多支链受力,其承载强度很高,并且机构的动平台不易发生位移变形,具有较强的刚度。并联机构能够避免串联机构中各个关节中误差的相互累积,误差相互抵销,具有较高运动精度。运动支链的运动是确定的,各支链相对惯性低,使动平台能够获得很高运动速度。运动支链的形式是多样的,能够更好适应复杂的空间装配,应用灵活性很强。由于并联机构受力的合理性,运动部件关节不容易发生磨损和腐蚀,机构的应用时间得到了延长。
在只考虑静载荷,而不计由惯性力而产生的动载荷,并联机构动平台会受到外界力作用的影响将之进行静态分析,此时外界力会与各主动副驱动力相平衡。并联机器人的运动学分析可以分为速度、加速度、位置3部分分析。其中,速度分析对机器人输入输出构件之间问题求解,可得出位置的正解和反解分析。根据较为简单的位置反解分析结果,求解机器人的雅可比矩阵,进而对其速度和加速度进行分析,将机器人的刚性和灵活性进行直接映射。将并联机构解耦准则进行讨论,得到并联机构速度输入输出公式:
其中:J为并联机器人的雅可比矩阵;q是机器人的输入速度;V为动平台的输出速度。若J在整个工作空间内始终为非零对角阵,该并联机器人是完全解耦并联机构;若J在整个工作空间内在保持始终为非零对角阵的同時,对角元素也保持不变,此时,该并联机器人是完全各向同性并联机构;若J在整个工作空间内在保持始终为非零对角阵的同时,对角元素也保持不变,此时,该并联机器人是完全各向同性并联机构;若J在整个工作空间内在保持始终为三角阵,该并联机器人是部分解耦并联机构。若该机器人并联机构不是以上3种情况,则为解耦并联机器人。
3 验证实验
3.1 实验目的
为了检测本文设计的四自由度3T1R双输出3D打印解耦并联机器人的应用效果,通过实验将本文设计的四自由度3T1R双输出3D打印解耦并联机器人与传统打印机器人进行对比,比较该机器人的实际工作效果,设计了对比实验。
3.2 实验参数设置
设置实验参数如表1所示。
3.3 实验过程
根据上述设定的参数进行实验,选取传统打印机器人和本文四自由度3T1R双输出3D打印解耦并联机器人在相同的外界环境下进行相同工作实验,将实验测量结果进行记录并分析。
3.4 实验结果与分析
实验结果如下:
1)构件精密度比较实验
构件的精密度会随着使用时间的延长而有所降低,如图8所示。但是,与传统机制相比,本文建立的四自由度3T1R双输出3D打印解耦并联机器人构件的精密度明显高于传统并联机器人构件。在连续使用4 h后,本文机器人机制的构件精密度约为99%,而传统机器人机制的构件精密度只有97%。随着时间的延长,当使用时间达24 h,本文机器人机制的构件精密度约为92%,而传统机器人机制的构件精密度已降低至81%。因此,本文四自由度3T1R双输出3D打印解耦并联机器人性能明显由于传统并联机器人。
2)构件尺寸误差比较实验
将10 s内的构件尺寸的误差进行比较,如图9所示。本文建立的四自由度3T1R双输出3D打印解耦并联机器人打印出的构件尺寸误差主要分布在0.1%之内,但经传统并联机器人打印出的构件尺寸误差只能分布在0.5%之内,远高于本文构件,因此,本文构件尺寸更加精确。
3.5 实验结论
将传统和本文的打印机器人对比实验结果进行分析,得到的实验结果为:传统打印机器人和本文四自由度3T1R双输出3D打印解耦并联机器人在一定程度上都能满足人们的需求,但与传统并行机器人工艺相比,本文建立的四自由度3T1R双输出3D打印解耦并联机器人工作效率更高,成本更低,成品更加精细,更具有应用价值。因此本文四自由度3T1R双输出3D打印解耦并联机器人的设计能够有效的优化传统并联机器人。
4 总结与展望
随着智能化生产的不断发展,3D打印技术作为一种新型的生产制造技术,改变着人们对制造工业的看法,逐渐打破了传统制造技术的限制。与串联机器人相比,并联机器人具有高精度、高速、高强度、大承载力、小惯性等优点,但是并联机器人各支链之间一般存在耦合关系,且其运动学具有非线性特性,动力学特性复杂,因此需要进行解耦处理。
本文对四自由度3T1R双输出3D打印解耦并联机器人进行设计,解决传统3D打印并行机器人现有的问题,将其进行完善,在提高工作效率的同时,降低所需成本,相信3D打印解耦并联机器人的发展前景会越来越广阔。
参考文献:
[1]常定勇,方跃法,叶伟. 双输出3D打印解耦并联机器人的设计与分析[J]. 机械工程学报,2017,53(7):39-46.
[2]曹毅,秦友蕾,陈海,等. 完全各向同性解耦3T1R型并联机器人构型综合[J]. 上海交通大学学报,2016,50(5):702-709.
[3]何景峰,谢文建,韩俊伟. 六自由度并联机器人输出解耦控制[J]. 哈尔滨工业大学学报,2018,38(3):395-398.
[4]潘英,方跃法,汪丛哲. 五自由度3D打印并联机器人设计及分析[J]. 中国机械工程,2016,27(17):2273-2279.
[5]马晓丽,马履中,周兆忠,等. 3T-1R并联平台的工作空间分析与优化设计[J]. 中国机械工程,2017,17(18):1938-1943.
[6]杨桂林,吴存存,陈庆盈,等. 3T1R并联机构运动学分析与优化设计[J]. 农业机械学报,2017,48(12):386-394.
[7]YANG T L,LIU A X,SHEN H P,et al. Topological structure synthesis of 3t-1r parallel mechanism based on azimuth characteristic equation[J]. Journal of Mechanical Engineering,2017,53(21):54-64.
[8]YU H,ZHU W,YIN W S,et al. Motion analysis of a 6-DOF parallel micro-motion robot with 3-2-1 orthogonal arrangement[J].Mechanical Design and Research,2018,20(S1):191-193.
[9]蔣金云,施琴,朱和军. 2-UPU-RRC并联机构及奇异位形分析[J]. 现代制造工程,2018,2010(1):15-17.
[10]屈淑维,李瑞琴,郭志宏. 一种三自由度并联解耦机构的型综合[J]. 机械设计与研究,2017,55(1):31-34.
[11] ZHOU S R,LIU H Z. Workspace and kinematics analysis of a 3-crcr/rpu symmetric parallel robot mechanism[J]. China Mechanical Engineering,2017,28(20):2500-2508.
[12]SHEN H P,YIN H H,SHAO G W,et al. Design and kinematics analysis of 3T1R parallel manipulator with low coupling degree[J]. Transactions of the Chinese Society of Agricultural Machinery,2017,48(5):405-412.
[13]秦友蕾,曹毅,陈海,等. 完全解耦3T2R并联机器人构型综合方法[J]. 航空学报,2016,37(6):1983-1991.
[14]石志新,罗玉峰,叶梅燕. 一类新型5自由度解耦并联机器人机构及位置分析[J]. 机床与液压,2017,38(17):5-7.
[15]宫金良,张彦斐,魏修亭. 基于输入组的六自由度解耦并联机器人[J]. 机械科学与技术,2017,26(11):1422-1424.
