基于多特征自适应融合的粒子滤波目标跟踪算法∗
2020-10-14董娜刘军
董 娜 刘 军
(兰州理工大学机电工程学院 兰州 730050)
1 引言
视频目标跟踪[1~2]是计算机视觉领域的研究热点之一,其在人机交互[3]、车辆导航[4]、智能监控[5]等诸多方面有着广泛的应用前景。尽管各学者在该学科进行了大量研究,但是在针对复杂环境下的目标跟踪问题上依然存在很多需要克服的难点,如视频序列中的光照变化、尺度变化、姿态变化、背景杂波等干扰因素。
粒子滤波算法[6~8]有效地解决了非线性动态系统分析的难题,为目标跟踪中的非线性与非高斯情况下的跟踪提供解决办法。但是传统的粒子滤波算法也存在一些问题,其中有单个特征描述目标外观导致跟踪的鲁棒性差的问题和跟踪粒子的贫化问题。近年来,学者们基于此提出了一些改进算法。部分学者将颜色特征与纹理特征进行融合[9~13],克服了光照和姿态变化等因素的影响。Wang[14]用遗传算法的交叉变异生成新粒子来改变粒子贫化问题。Zhang[15]在将分块思想应用到粒子滤波框架下解决遮挡问题。尽管这些算法能够一定程度上提高目标跟踪的稳定性,但是在面对复杂环境下的跟踪问题时存在多种因素的影响,例如光照变化尺度变化、形变等,就会使跟踪精度大大降低。
因此为了应对上述存在的问题,本文提出了一种多特征自适应融合的粒子滤波目标跟踪算法。该算法主要包括两点优势:1)进行特征融合时,采用动态分层融合方法。该方法首先通过计算每个特征的粒子相似度值的方差来判断哪个特征为分层的基准特征,进而以该特征的相似度值的大小为基础将粒子群进行分层,给每层的粒子群赋予不同的权重参数,然后计算每个粒子非基准特征的权重值,最后根据该权重值和分层得到的权重参数来计算双特征下的融合权重值。2)在生成候选样本时,利用帧差法检测出运动目标物体的区域作为辅助候选样本来充盈粒子的多样性。实验表明,本文提出的算法在应对光线变化、尺度变化、形变问题时有较高的稳定性。
2 多特征融合的粒子滤波跟踪算法
为了判断HOG 特征与颜色特征哪个特征在每帧中具有较好的区分度,本文通过比较两个特征相似度值的方差值来进行判断,进而基于拥有较大方差值的那个特征来进行粒子分层。
2.1 多特征融合
2.1.1 方差值比较
通过统计方式得到第i 个粒子的HOG 特征向量为pi_HOG,目标样本的HOG 特征向量为qHOG,第i个粒子与目标样本之间的Bhattacharyya距离[16]为
同理用式(2)求的粒子颜色特征的方差值Vcolor。
得到每个特征相似度值的方差后,通过比较每个特征相似度值的方差值大小来确定分层特征:

上式(4)中x 代表分层特征。
2.1.2 分层融合策略
假设P1,P2,…,Pn为n 个候选样本,其对应特征x 的相似度值为d1_x,d2_x,…,dn_x,并且满足d1_x≥d2_x≥d3_x…≥dn_x,则分层融合策略具体表现为
通过上式看出,我们根据其相似度值的大小将粒子分为好中差三层,然后依次给每层的粒子赋予不同的权重参数。
n个候选样本对应特征y 的权重值为

两特征融合后的权重为

通过上式可以看出,本文分层法融合策略采用的优中选优的思想,因此能够充分利用两特征的优良信息。
2.2 帧差法检测运动区域
针对单纯的粒子滤波算法不能应对消失后重跟和目标尺度变化的问题,本文采用帧差法[17]辅助生成预测粒子,即利用帧差法检测出运动目标的剪影,然后经过腐蚀膨胀过程得到闭合区域,最后利用外接矩形法得到运动物体的区域。
设F1,F2,…,Fm为检测得到的m 个运动区域,其对应的相似度值dF1_total,dF2_total,…,dFm_total,通过比较其相似度值选出最大的那个区域加入的粒子群中去,具体表达为

2.3 模板更新
随着目标的运动和外界环境的光线变化,目标的外观发生变化,采用一层不变的目标模板会导致跟踪精度降低。因此,需要采用目标更新的方式来解决该问题。并且模板更新的方式决定目标模板的准确度,过快的更新将会导致目标模板中引入错误信息,过慢的更新将会导致目标模板无法匹配目标外观的变化。
本文采用当前跟踪目标与目标模板间匹配的Bhattacharyya 系数来确定是否更新模板,具体表现为

当d >β时,对模板进行更新,更新方式为

式中:qt表示第t 帧目标模板,pt表示本帧跟踪的目标,α 为更新速率因子。本文 β=0.6,α=0.2。
2.4 算法流程
本文算法流程如下:
1)初始化。在视频初始帧手动选择要跟踪的目标的区域,并提取该区域内的HOG 特征向量和HSV空间的颜色特征向量,并在目标周围利用高斯分布初始化N个粒子{p1,p2,…,pn}。
2)粒子传播。通过给重采样得到的粒子集加入高斯噪声,使其向周围传播生成预测粒子{p1,p2,…,pn}。同时利用帧差法检测运动物体的区域{F1,F2,…,Fm}。
3)权值更新。计算每个预测粒子的各个特征的相似度值,同时计算用帧差法检测得到的若干个运动区域的对应特征的相似度值,并根据2.1 节描述的多特征融合的方法计算融合权重,然后进行归一化。
4)重采样。完成权值更新后得到每个候选样本的融合权重,根据每个粒子融合权重值大小,采用重要性采样方法对粒子组进行重采样。
5)状态估计。选择拥有最大权重值的粒子为目标最新状态。
6)模板更新。当估计出当前帧目标的位置后,根据2.3节介绍的模板更新方式完成模板更新。
3 实验结果与分析
为了较好地说明本文算法相较于传统粒子算法跟踪精度上的提高,本文将本文算法和传统粒子算法基于HOG特征和基于HSV颜色特征跟踪结果进行比较。为了更公平的比较,本文算法和传统粒子滤波算法都将粒子数设定为100。并且采用相同的实验环境下进行。其硬件实验平台:CPU 为Intel(R)3.4GHz,RAM为4GB,计算机系统为Win7×86bit。 软件配置为引入开源图像处理库OpenCV2.4.9的Visual C++2010。
本实验通过对两个视频的跟踪结果的分析来说明本文算法的优势,这两个视频分别为Singer1和basketball,其中Singer1 视频中跟踪目标为一个白色衣服的女歌手,其存在的主要跟踪挑战性因素为:剧烈光线变化和尺度变化;Basketball视频中跟踪的目标为穿绿衣服的9 号球员,其存在的主要的跟踪挑战因素为部分遮挡、形变和的背景杂波。下面为跟踪的结果图。
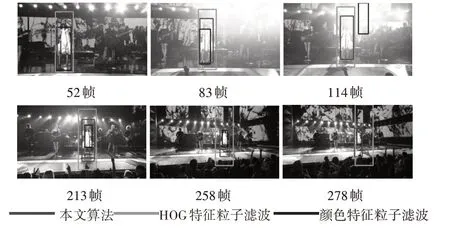
图1 Singer1跟踪效果图

图2 Basketball跟踪效果图
图1 展示的是我们跟踪Singer1 视频中穿白色长裙的女歌手的跟踪效果图,通过该图可以看到基于颜色特征的粒子滤波算法在第114 帧光线发生剧烈变化时已经完全跟丢,213 帧时由于光线又恢复如初其又重新跟踪到目标。基于HOG 特征的粒子滤波算法在光线发生变化时虽然没有跟丢,但是得跟踪框的尺寸和实物差别慢慢增大,而且在目标实物缩小时,其跟踪框的尺寸不但没有缩小,而且持续变大,导致后面跟踪的误差很大。本文算法在应对光线变化时能够稳定跟踪,同时其跟踪框的尺度也能随目标的尺度的变化进行自动调整。图2展示的我们跟踪视频Basketball视频中穿绿色球服9 号球员的跟踪效果图,通过该图可以看出,基于颜色特征的粒子滤波在472 帧之前虽然存在偏差但是没有跟丢目标,472 帧时其已经出现偏离跟踪目标的现象,后面跟踪则是完全跟丢。基于HOG特行的粒子滤波在第62 帧时,就出现跟踪偏移,之后帧中则是完全跟丢。本文算法无论目标发生多大的形变,其都能稳定跟踪目标。
图3、图4 中展示的singer1 视频和Basketball视频的跟踪结果评价图,其横轴表示视频帧数,纵轴表示跟踪的中心偏差,红色曲线表示本文算法的评价曲线,绿色曲线表示基于HOG 特征的粒子滤波的跟踪评价曲线,蓝色曲线表示基于颜色特征的粒子滤波的跟踪评价曲线。根据该评价图也能够看出本文算法相对传统粒子滤波算法拥有较高的跟踪稳定性。

图3 Singer1跟踪结果比较图
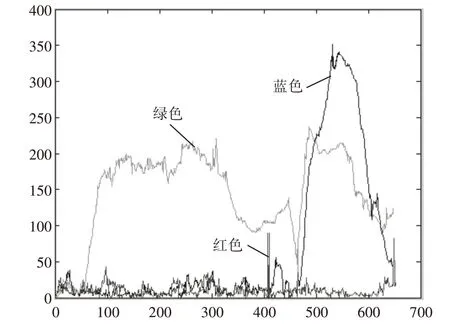
图4 Basketball跟踪结果比较图
4 结语
本文针对传统粒子滤波算法存在的不足之处,提出了多特征自适应融合的粒子滤波算法。该算法在建立目标外观模型时采用动态分层融合策略,使得该目标模型更能充分描述目标信息。同时本文还采用帧差法来检测运动区域来降低粒子的贫化现象。实验表明,本文算法在应对光照变化、部分遮挡、形变等有着不错的效果。
