单片机步进电机控制系统设计
2020-10-13张德田
张德田
(保定职业技术学院,河北 保定 071000)
1 系统方案设计
本系统由CPU控制模块、启动控制模块、步数调节模块、转速调节模块、正反转控制模块、电机控制模块及正反转标识模块构成。
具备以下控制功能:
(1)一键启停功能。
(2)步进电机步进步数增减可调功能。
(3)电机转速增减功能。
(4)正反转控制功能。
(5)正反转方向标识功能。
其控制系统设计方案如图1所示:

图1 步进电机控制系统框图
2 各模块介绍
2.1 CPU控制模块
步进电机控制系统选用C8051F系列单片机作为控制核心。C8051F系列单片机是由美国Silicn Labs公司生产的,不仅完全兼容89S51单片机指令系统,结构也与传统单片机类似,具有优越的性能和很好的应用前景。
2.2 电机控制模块
本步进电机控制系统选用四相永磁式步进电机。选用单片机P2.0、P2.1、P2.2和P2.3引脚分别连接步进电机的U、V、-U、和-V端。采取单双八拍控制方式控制步进电机工作。
2.3 启动控制模块
单片机P0.5口接启动按键控制步进电机的启动。低电平令步进电机启动,构成步进电机启动模块。
2.4 步进调节模块
单片机P0.0和P0.1引脚接步进电机步数增加、减少的调节按键,构成步数调节模块。
2.5 转速调节模块
单片机P1.4和P1.5引脚接步进电机转速增加、减少的调节按键,构成转速调节模块。
2.6 正反转控制模块
单片机P1.6引脚接正反转控制按键,构成正反转控制模块。
2.7 正反转标识模块
单片机P0.3口设为转向标志位,低电平为正转、高电平为反转。
3 软件编制要点
步进电机实际上是一个数字/角度转换器。步进电机的励磁绕组可以制成各种相数,常见的有单相、三相、四相和五相等多种。四相步进电机有4对磁极、4个绕组,每个磁极的表面都分布着大小相同、间距相同的多个小齿,转子圆周表面也均匀分布着与定子小齿形状相似、齿间距相同的小齿。若转子齿数Z为40个,则
齿距角=360°/Z=360°/40=9
为了控制步进电机的转动,使其实现数字到角度的转换,可以由单片机按顺序给电机绕组加有序的脉冲电流。转过的角度数正比于脉冲个数,转动的速度正比于脉冲频率,而转动的方向则与脉冲顺序有关。
令单片机P2.0口接U相驱动端,P2.1口接V相驱动端,P2.2口接-U相驱动端,P2.2口接-U相驱动端。单相四拍、双向四拍和单双相八拍3种情况下整转的控制字如表1所列。
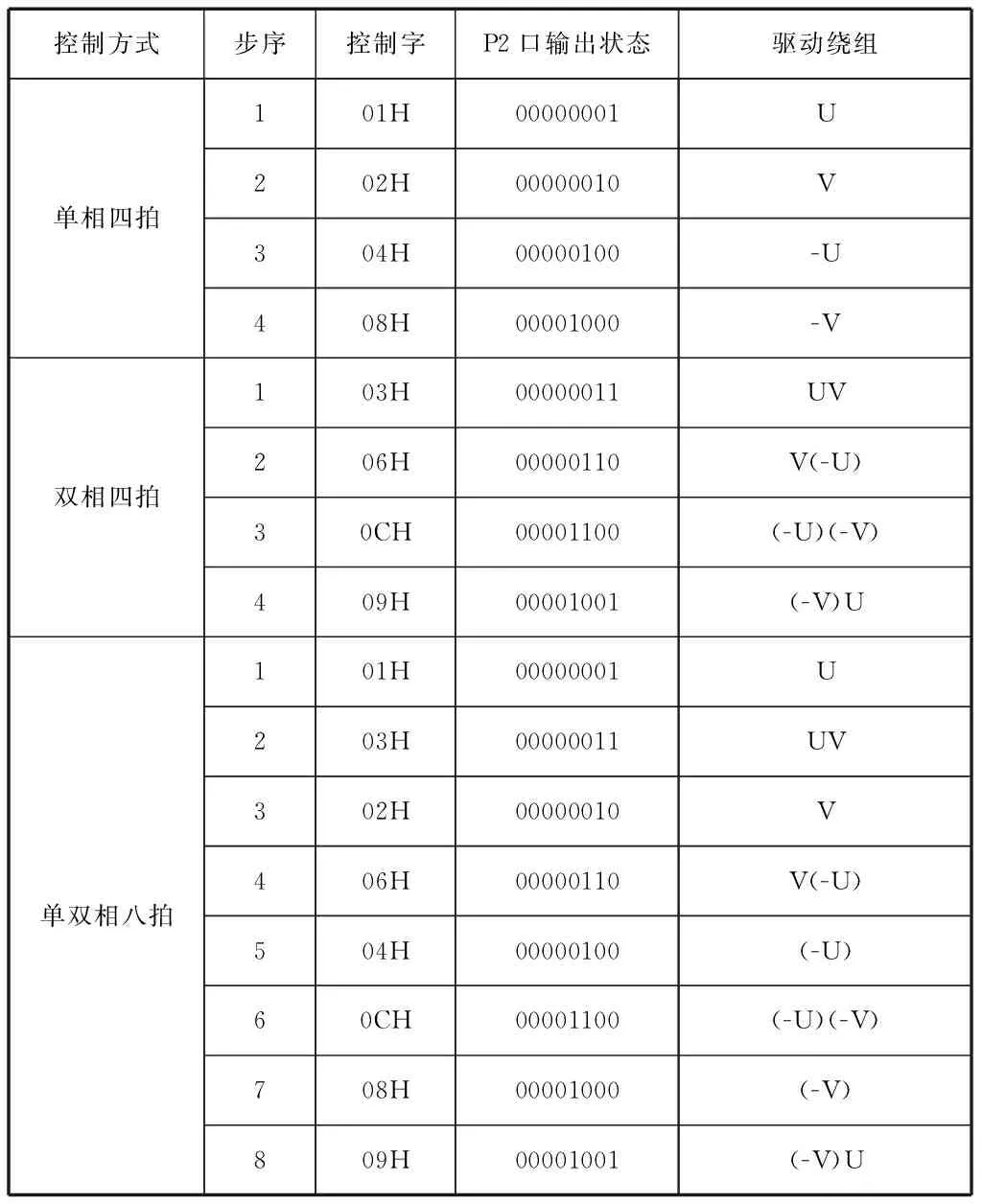
表1 控制字表
步进电机转速的调节可通过调节脉冲周期来实现。程序中,可设置延时子程序,改变每个脉冲周期,调用延时子程序的次数或改变延时时间可实现转速控制。
4 结语
此单片机实现对伺服电机控制的方案,能实现对伺服电机变速、匀速运动的平稳控制。该方案可在彩色电脑喷印机、绘图仪等应用,可实现对运动过程的平稳控制和精确控制。