多自由度智能运输装置动作路径规划算法
2020-10-13施嘉濠罗汉杰竺佳杰孙滨鑫
施嘉濠 倪 虹 罗汉杰 竺佳杰 孙滨鑫
(杭州师范大学钱江学院,浙江 杭州 〗310018)
0 引言
放眼全球,工业机器人发展普遍始于20世纪60年代,美国、日本、德国的工业机器人发展迅速。我国虽然起步较晚,但是近年来发展势头迅猛[1]。如今越来越复杂的工作环境使机器人必须设计有多连杆,多自由度的复杂结构。这对机器人的运动规划提出了更高的要求。机器人运动学分析是实现机器人运动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题[2]。而 D-H参数法[3-4]是常用的分析方法。通过D-H参数法,可以对机械臂的运动进行十分细致地研究,为机械臂的结构优化打下基础。
1 运输装置的结构及控制
多自由度智能运输装置是一个具有RFID远程控制,液晶屏显示监控的智能小车和机械手一体化协同工作的装置,其执行机构控制系统由4个部分组成:智能小车控制系统、垂直升降平台控制系统、机械臂控制系统和远程控制系统,配合RFID无线识别系统,液晶屏显示监控系统。其中执行机构控制电路部分主要由寻迹模块、直流电机驱动模块、光电信号采集模块、滚珠丝杆电机驱动模块、Arduino主控制器等电路组成。
该智能运输装置从结构上可以分为运输装置和机械臂2部分。其中,手臂分为4个关节,每个关节都由LDX-218舵机驱动。
2 路径规划算法的实现及优化
2.1 运动力学分析
对搭载于小车上的机械臂通过D-H方法建立运动学模型,当机器人末端位姿已知时,通过末端位姿计算出满足期望的关节角度,这便是逆运动学的求解。
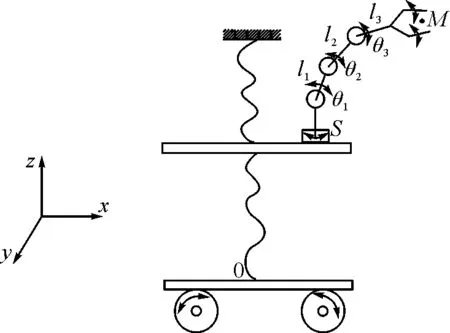
图1 机体的相对运动关系及其结构
2.2 路径规划算法的实现
记末端安装有舵机1的连杆长度为l1,同理得l2,l3。舵机旋转角度记为θ0,θ1,θ2,θ3,θ4。在已知目标点M(x,y,z)的情况下,若机械臂可达工作点,则
(1)
此时机械臂与目标点同一平面内,三维空间中的路径规划问题变为X-Z平面内的四连杆路径规划问题。在X-Z平面确定各个位置的坐标,夹持器工作位置设M′,小车顶板中央点设为坐标原点O′,机械臂旋转中心坐标记为S′。
(2)
其中,x轴坐标p为固定值,z轴坐标q为变量。取一点P使
|M′P|≤l1+l2
(3)
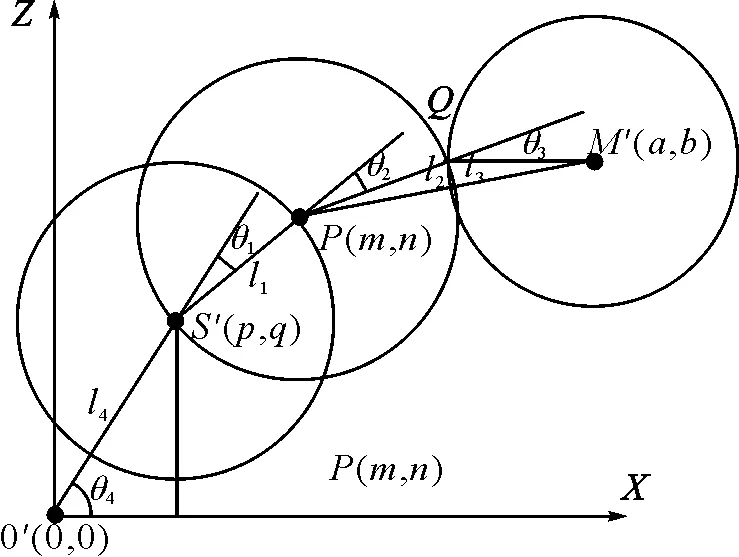
图2 平面四连杆坐标系示意图

(4)
与l1=l2=l3联立得
(5)
分析可知,在X-Z平面内,以S′为圆心,以l1+l2+l3为半径的区域内,对任意一点异于点S′的点M′,通过逆运动学分析寻找到至少一组解,当舵机旋转相应的角度时,机械臂可以运动至目标点M′。圆2方程和(4)联立,得式(6)
(6)
将点P代入圆1方程得
(m-p)2+(n-q)2=l1
(7)
由式(6)得m取值范围,将其与(7)进行联立可得到n的值。p点的取值范围随之解出。
3 结语
本文研究了多自由度智能运输装置的结构设计,该运输装置结构紧凑,应用前景广泛。通过DH参数法对机械臂的运动学模型和参数进行分析,得出了基于DH算法的路径规划方法。通过使智能运输路径规划与机械臂路径规划算法的配合,可以使运输机构运动的同时保证机械臂完成预定操作,该研究对多自由度结构的轨迹规划具有重要的参考意义。