基于深度学习的角度传感器信号拟合方法研究
2020-10-12黄智飞
黄智飞
摘要
角度传感器在实际使用中很容易受到电磁等环境因素影响,导致其转动方向值是一组不规律的数值,很难找到准确的函数来拟合数据。针对角度传感器易受不规律干扰波动影响的问题,本文应用深度神经网络算法来拟合角度传感器的转向值,旨在找到角度传感器转动规律,降低外部环境因素对角度传感器的影响,提高多传感信号测量精度。实验表明,深度神经网络算法的函数拟合能力很强,拟合效果不错。
关键词:角度传感器;函数拟合;深度学习;神经网络
0引言
20世纪90年代初期,首款角度传感器被应用在汽车上用来辅助驾驶[1]。随着传感器制造技术的不断迭代更新,越来越多新颖、性能稳定的角度传感器被发明出来。如今磁电式角度传感器以其角度转动精度高、性能稳定等优点成为应用最为广泛的角度传感器之一[2]。故本文选用磁电式角度传感器为研究对象。
磁电式传感器又名感应式传感器,有配用电路简单、性能稳定等特点。磁电式角度传感器由1个主动齿轮、2个从动齿轮和霍尔传感器等构成。一般情况下,主动齿轮是接外部仪器,由外力驱动,比如应用在汽车上的磁电式角度传感器,其主动齿轮与汽车方向盘相连。当方向盘转动时会驱动主动轮做同心转动主动轮带动从动轮转动。传感器的角度输出是通过安置在从动轮上的永磁铁得到的,磁场的变化会被霍尔传感器感知从而输出相应的角度值。从磁电式传角度传感器的工作原理中可知,在实际使用中其很容易受到电磁等环境因素影响导致其干扰转动方向值是一组不规律的数值,如果可以找到准确的函数来拟合干扰转动值,则角度传感器在实际使用时可提前预警自动修正,达到抗干扰的目的。
本文利用深度神经网络强大的数据拟合能力,应用深度神经网络来拟合角度传感器的转向值,旨在找到角度传感器转动规律,降低外部环境因素对角度传感器的影响提高多传感信号测量精度。本文做了多次对照实验,通过神经网络各种超参数组合情况,找到了能达到最佳拟合效果的深度神经网络模型。
1深度神经网络
为了提升预测或分类的精确度,深度学习方法建立了含有许多个隐含层的深度神经网络模型,而且使用大量的数据使模型学习繁杂但是有效的信息[3]。深度学习和浅层学习最大的不同是神经网络的结构,相对于浅层学习,深度学习的结构更深可以处理复杂程度更高的非线性问题。
1.1深度神经网络原理
在深度神经网络中,每层神经元的输入都是上一层神经元的输出,当网络结构不断加深,后面一层的神经元的表示更为抽象深入,其输出的值也更抽象[4]。
1.2深度神经网络的训练
采用一般深度学习的实验流程,主要由数据预处理、训练以及验证三部分构成,具体流程如下:
第一步:數据预处理,将数据做归一化处理。
第二步:模型训练,设置不同的超参数组合情况,寻找最佳神经网络结构。
第三步:模型验证,计算R方和调整R方两个评价指标来衡量性能好坏。
2 应用效果分析
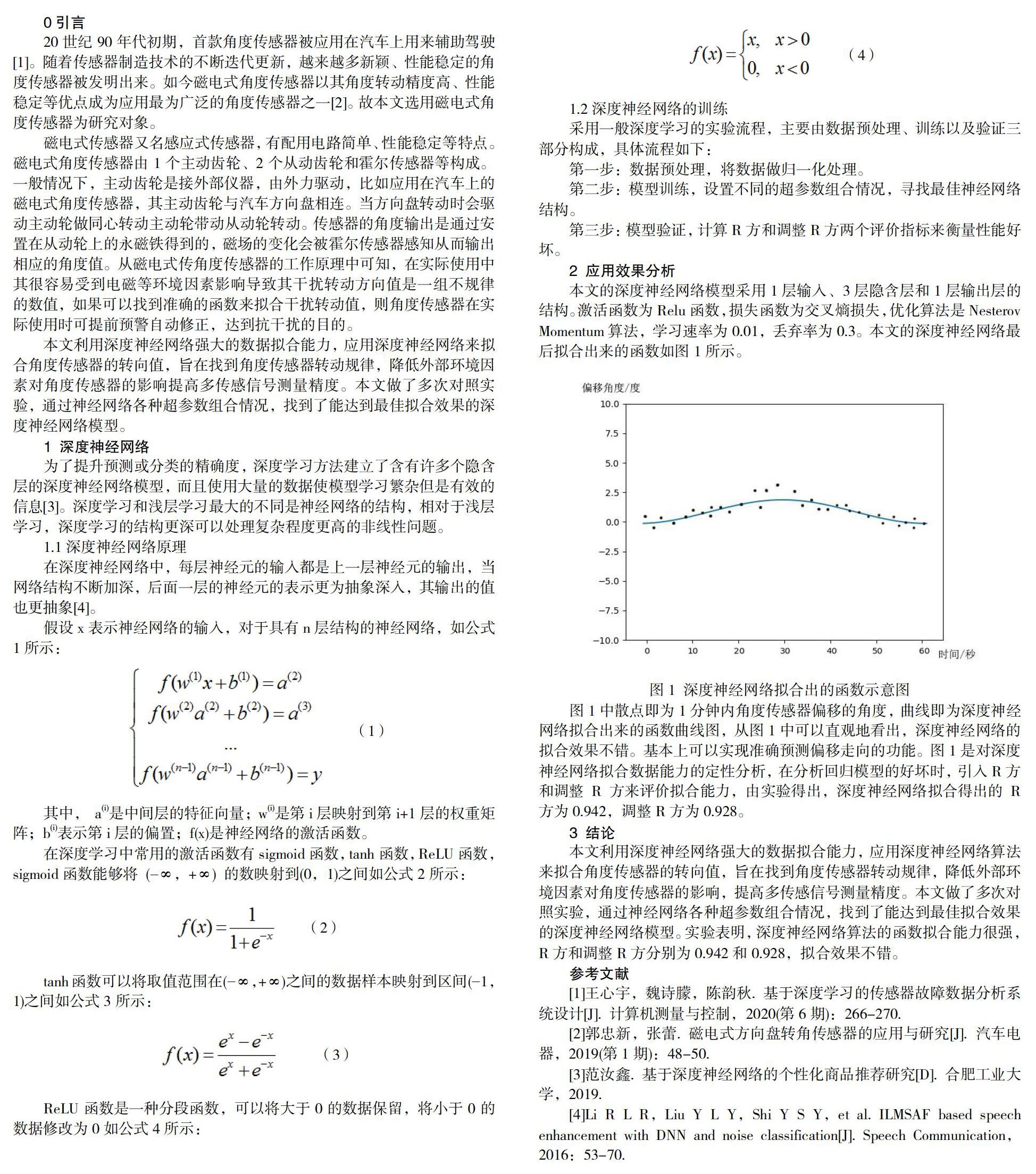
本文的深度神经网络模型采用1层输入、3层隐含层和1层输出层的结构。激活函数为Relu函数,损失函数为交叉熵损失,优化算法是Nesterov Momentum算法,学习速率为0.01,丢弃率为0.3。本文的深度神经网络最后拟合出来的函数如图1所示。
图1中散点即为1分钟内角度传感器偏移的角度,曲线即为深度神经网络拟合出来的函数曲线图,从图1中可以直观地看出,深度神经网络的拟合效果不错。基本上可以实现准确预测偏移走向的功能。图1是对深度神经网络拟合数据能力的定性分析,在分析回归模型的好坏时,引入R方和调整R方来评价拟合能力,由实验得出,深度神经网络拟合得出的R方为0.942,调整R方为0.928。
3结论
本文利用深度神经网络强大的数据拟合能力,应用深度神经网络算法来拟合角度传感器的转向值,旨在找到角度传感器转动规律,降低外部环境因素对角度传感器的影响,提高多传感信号测量精度。本文做了多次对照实验,通过神经网络各种超参数组合情况,找到了能达到最佳拟合效果的深度神经网络模型。实验表明,深度神经网络算法的函数拟合能力很强,R方和调整R方分别为0.942和0.928,拟合效果不错。
参考文献
[1] 王心宇, 魏诗朦, 陈韵秋. 基于深度学习的传感器故障数据分析系统设计[J]. 计算机测量与控制, 2020(第6期):266-270.
[2] 郭忠新, 张蕾. 磁电式方向盘转角传感器的应用与研究[J]. 汽车电器, 2019(第1期):48-50.
[3] 范汝鑫. 基于深度神经网络的个性化商品推荐研究[D]. 合肥工业大学, 2019.
[4] Li R L R, Liu Y L Y, Shi Y S Y, et al. ILMSAF based speech enhancement with DNN and noise classification[J]. Speech Communication, 2016:53-70.
