医用机器人标准体系研究
2020-10-12张超孟祥峰王权王浩唐桥虹李佳戈
张超,孟祥峰,王权,王浩,唐桥虹,李佳戈
中国食品药品检定研究院 医疗器械检定所,北京 102629
引言
近年来,作为一个国家科技发展和高端制造业水平的重要标志,机器人特别是医用机器人产业发展受到了世界各国的高度关注。国务院、科技部、工信部等自2012 年开始出台了一系列政策文件[1-4]支持医用机器人领域的发展,科技部高技术研究发展中心从2016 年开始启动实施的“智能机器人”重点专项[5-7]和生物中心的“数字诊疗装备研发”重点专项[8-10]则提供了良好的科研环境,旨在加速推进我国医用机器人技术与产业的快速发展。
随着系列政策的支持引导以及科研上的大力投入,我国医用机器人产业也取得了一定的成绩,在研发方面已实现专科化发展,部分产品已经取得了医疗器械注册证。但是,我国的医用机器人产业在持续向好的同时依然面临挑战和困难,部分企业核心技术研发能力及产品质量还有待提高。以目前临床应用较为广泛的手术机器人为例,有研究表明,手术机器人在实际临床使用过程中存在较大的安全风险,出现了较多的不良事件,机器人本身出现的技术问题就包括:软件问题、器械掉落、热灼伤、意外操作、电缆/电源问题等,对患者造成了不同程度的伤害[11]。2019 年11月份,美国FDA 发布了一则关于一款手术机器人平台的Ⅰ类(最严重的级别)召回信息,召回的原因是软件可能将机械臂驱动到错误的位置,对患者造成危险[12]。标准是产业发展和质量技术基础的核心要素,在医用机器人发展中具有基础性和引导性的作用,因此亟需建立符合我国国情的医用机器人标准体系,为开展全面、科学、统一的质量评价提供必要的依据,为产品的上市审批提供技术支撑,同时可以有效固化前期的研究成果,促使我国医用机器人产业向高端化发展,提高核心竞争力。
1 标准体系的研究
1.1 标准化现状
在国际方面, 国际标准化组织(International Organization for Standardization,ISO)和国际电工委员会(International Electrotechnical Commission,IEC)是从事机器人标准化方面工作的两大主要组织。1983 年ISO/TC184/SC2 制造环境机器人分技术委员会成立,初期主要从事与工业安全相关的词汇和性能方面的标准化工作,随后为了适应机器人技术的发展,ISO/TC184/SC2 升级成为ISO/TC299 机器人技术委员会,其工作范围除工业机器人外也包含医用机器人等非工业领域,但是目前没有形成专门针对医用机器人的专用标准体系。在IEC 方面,医用机器人的标准化工作主要由IEC/TC62 技术委员会承担,其与ISO/TC299 组成的联合工作组JWG35 和JWG36 在2019 年7 月份发布了IEC 80601-2-77[13]和IEC 80601-2-78[14]标准,这两个标准是作为医用电气设备基本安全和基本性能通用要求标准的修改和补充,旨在明确手术机器人和康复机器人的基本安全要求和基本性能要求,有助于制造商在设计研发过程中开展更为全面的风险控制活动,同时为该类产品上市前安全性方面的质量评价提供基本依据,但是这两个标准并未涉及有效性方面的要求。
在我国,目前已发布的整机标准、部件标准、检测方法标准均是针对工业机器人、服务机器人等(部分已发布标准情况见表1),未涉及医用机器人。

表1 SAC/TC159/SC2 部分已发布标准情况
为了适应医用机器人产业的迅猛发展,2016 年由中国食品药品检定研究院(国家局医疗器械标准管理中心),以下简称:中检院)牵头,成立了医用机器人标准化专项工作组,开启了我国医用机器人的标准化工作,对我国医用机器人产业起到了积极的指导与促进作用,为标准预研提供前期的技术储备工作。2020 年2 月,由中检院等单位起草的YY/T 1686-2020《采用机器人技术的医用电气设备分类》标准发布,IEC 80601-2-77 和IEC 80601-2-78 标准的转化工作也已经正式立项。2019 年8 月,国家药品监督管理局批复同意由中检院组织筹建医用机器人标准化技术归口单位,筹建方案已于2020 年4 月进行公示[15]。归口单位的成立将有助于建设针对医用机器人的标准体系,解决医用机器人标准缺失问题。
1.2 标准体系的设计思路
与传统医疗器械相比,医用机器人是一种融合了医学、电子、机械、光学、人机接口、模式识别等多领域的综合性医疗器械[16-17],软硬件层面往往包括多个组成部件[18],相互之间需要进行通讯、控制,各部件的质量会直接或者间接影响到整个机器人系统的正常运行。目前医用机器人主要分为手术机器人和康复及功能补偿类机器人两大类,在手术机器人中又主要分为主从遥控式和图像引导式两个小类。本文将从如下六个方面进行设计。
1.2.1 通用定义方面
从医用机器人整体层面分析,该类产品所涉及的领域广泛且深入,存在学科交叉的情况,因此存在术语指向、分类定义不清晰的问题,亟需统一行业内的术语、定义、分类,便于后续工作的开展。
1.2.2 可靠性方面
目前,可靠性要求在医疗器械领域刚刚起步,但是医用机器人通常情况下是为了替代或部分替代人进行高精度、高负荷的操作,往往存在大量的往复运动,在预期使用寿命期间机器人应当能够保持初始设计的精度要求,因此可靠性是医用机器人的潜在通用风险,应当充分考虑轴连续运转、长期运转、过度运转以及系列可能存在的单一故障所带来的精度及功能损失。
1.2.3 可用性方面
随着医疗器械功能的日益复杂,医疗器械在使用过程中出现的问题也越来越多,已严重影响到医疗器械的安全性和有效性,其根源主要在于医疗器械可用性设计存在问题。手术机器人就是一个典型的例子,在一场手术中,手术机器人的预期使用角色可能包括主刀医生、助手、厂家代表等,各角色都需要不同程度的操作机器人,这些操作都会影响手术的进程,进而关系着患者的安全。美国FDA在2016 年发布了一项指南草案[19],指明手术机器人需要提交可用性证明资料。康复机器人通常用于失能或部分失能患者的功能恢复与补偿,这类患者的力量和反应速度都处于较低的水平,一旦出现故障而患者或操作人员无法及时停止设备则会对患者造成伤害。因此在标准体系中应当对医用机器人的可用性作为通用要求进行考虑。
1.2.4 系统集成方面
在通讯接口方面,医用机器人各部件间及对外界需进行数据传输和交换,其对外的通讯接口和通讯协议均应为通用的标准格式,以便做到互联互通,用于保证医用机器人与医院已有软硬件之间的兼容性。在机械接口方面,可更换手术附件与机器人的安装接口应制作成便于快速更换同时具备一定机械强度的,该接口可以是无菌边界的一部分。
1.2.5 部件级性能及测试方法方面
医用机器人多以系统的形式出现,不同部件都有各自的技术特性以及潜在的安全风险,因此关键部件的性能会直接影响着整个系统的性能。以主从遥控式手术机器人为例,其3D 内窥镜和3D 显示装置是最为重要的实时影像获取装置,如果图像畸变、信噪比、色彩还原性等指标无法达到医用级别的要求,3D 效果带来的眩晕感及视觉疲劳,都有可能导致医生的误操作进而对患者造成危险,因此在建立各类产品专用标准前有必要对医用机器人各关键部件的性能指标提出要求,对应有的特殊技术的检测评定方法进行研究。
1.2.6 产品级性能及安全方面
作为医疗器械产品,医用机器人须满足安全性和有效性两方面的要求。安全性方面,医用机器人各组成部件间连接方式的不同可能导致漏电流、保护接地阻抗和电磁兼容方面的差异,不同的工作模式和基本性能选择也会对其电磁兼容性造成影响[20],因此有必要对其电气安全和电磁兼容方面进行特殊的要求。机械安全方面,在使用机器人进行手术或康复训练时,与患者安全最为相关的是机械方面的危险,例如主从遥控式手术机器人,机械臂的末端执行器往往是锋利的手术剪、刀,甚至是带有高频电的手术附件,如果手术器械穿过人体皮肤后用以支撑完成各种操作的中心点不稳定,机械臂本身到达极限位置或是主从操作映射比例不合理,都有可能造成患者的意外伤害。对于图像引导式手术机器人,通常是在患者的术前影像上进行手术路径的规划,术中进行配准和导航,由机器人自行完成手术切入点的对准或是部分钻骨、磨骨、植入的动作,在系列动作中是否加入了防碰撞或力反馈机制来保证患者安全,这都需要专用的机械安全标准来进行考量。有效性方面,除了前文提到的部件级的性能验证,系统级的性能则与治疗效果更为直接相关,例如主从遥控式手术机器人应当考虑从成像端到显示端、从主端动作到从端动作的整体延迟,图像引导式手术机器人应当考虑包含图像配准和实时导航在内的系统定位精度,康复机器人应当考虑到达某一指定位姿时各轴的角度及整体的柔顺性。
从技术的未来发展趋势分析,随着机器人技术本身的飞速发展,其在医疗器械中的应用也将逐渐深入,除了目前较为成熟的腹腔镜手术机器人、骨科手术机器人、上下肢康复机器人外,已经有诸如经人体自然腔道的手术机器人[21-22]、胶囊检查机器人[23-24]、穿刺活检机器人[25-27]、具备脑机接口的康复机器人[28-29]等新型应用机器人技术的医疗器械出现,待到技术储备成熟、已上市产品情况满足产品标准的申报条件,即可进行产品整机标准的研制,对某一类医用机器人产品的通用要求、技术要求、试验方法、检验规则、标签与标志、包装、运输等进行规范。同时可以对新技术带来的新的潜在风险及科学的评价方法开展研究。因此标准体系需要具有一定的前瞻性。
基于以上分析,在进行标准体系设计时,总体思路是应当从部件到系统、从通用到专用、从安全到性能进行全方位的考量,既考虑当下又要做到着眼未来。针对前文所述的医用机器人产品本身的技术特点、特殊风险以及机器人技术在医疗器械领域应用的共性关键问题,同时结合医疗器械标准体系的行业背景[30-31],设计制定了医用机器人标准体系,如图1 所示。
该标准体系包括基础通用标准、安全和性能标准及采用机器人技术其他相关标准三部分。基础通用标准,该部分是标准体系的基石和保障,主要包括术语和分类、可用性及可靠性、系统集成等方面的标准。安全和性能标准重点在于突出医用机器人作为医疗器械的特点,主要包括专用要求标准、安全标准和性能标准。采用机器人技术其他相关标准,此部分为应对技术发展的预留。
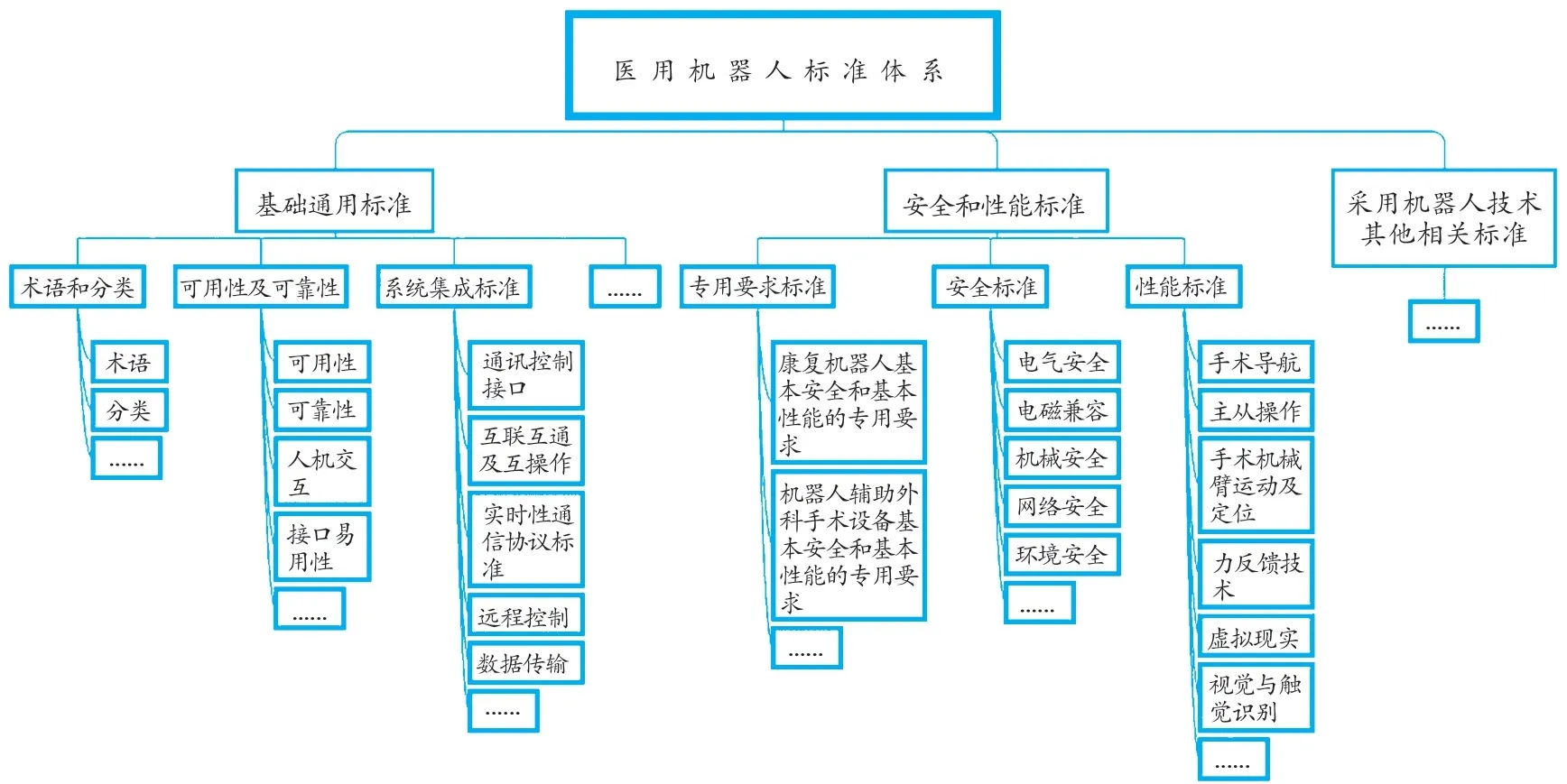
图1 标准体系框图
2 结论与展望
本文简要介绍了我国医用机器人的发展情况,较为系统的梳理了国际国内开展医用机器人标准化的情况,针对目前尚无医用机器人专用标准体系的现状,从七个方面进行了分析,提出了标准体系的构建思路。所提出的标准体系包括:医用机器人系统及部件,涉及通用要求、安全要求、性能要求和试验方法,涵盖手术机器人、康复机器人和正在日趋发展成熟的其他医用机器人,覆盖范围全面,同时专属性强,具有前瞻性,有助于引导医用机器人领域标准化工作科学有序的发展,为我国医用机器人产业的蓬勃发展保驾护航。相信随着科技的发展,医用机器人将作为一个载体加持越来越多,诸如5G 技术、裸眼3D、虚拟现实、脑机接口、人工智能等新技术,向着小型化、模块化、智能化发展,自治程度将逐渐提高,人机交互的方式也将日益友好,进一步降低医生的疲劳感和患者的潜在损伤。这些新技术的应用也将会使现有的评价体系和标准体系不断的面临挑战,需要我们去不断的完善和丰富,充分发挥标准的规范和引领作用。
