超音速鸭式布局导弹舵面偏转气动特性研究
2020-10-12王锌晨王学德
王锌晨,王学德
(南京理工大学能源与动力工程学院, 南京 210094)
海湾战争以来的局部战争表明,精确打击弹药在作战使用中占有的比例越来越高[1]。远程火箭弹具有射程远、威力大的优点,是我陆军装备的主要弹药之一。如何使其具有持续的弹道修正能力,从而实现精确打击是远程火箭弹的主要研究方向。其中主要的措施就是在弹体前部加装鸭舵,利用鸭舵偏转产生的控制力实现弹道修正[2-3]。鸭式布局导弹具备众多的优点:机动性能好、操纵效率高、导弹总体布局简单等。其弊端也很明显:鸭舵洗流的存在会对尾翼造成副翼反效作用[4-5],从而使得鸭舵很难实现滚转控制。实际上,鸭舵洗流的存在不但会对导弹的滚转特性造成影响,而且会导致舵后包括弹身和尾翼在内部件气动特性的非线性变化,表现为导弹在鸭舵动态偏转过程中的气动特性和固定鸭舵相对应处的气动特性会有明显的不同。而使用鸭舵偏转对导弹进行控制是一个动态的过程,因而对鸭式布局导弹舵面偏转过程的流场进行数值模拟并研究其气动特性的变化,具有非常重要的意义。
通常采用风洞试验作为鸭式布局制导火箭弹气动特性分析的主要手段[6],但由于风洞试验成本高、实施难度大,故对所设计的每一种结构方案都进行风洞测试是不现实的。此外,随着计算流体力学( CFD) 近几年的迅猛发展,已被广泛的用于计算各种制导弹药的气动特性[7]。然而,此前的有关鸭式布局导弹的研究主要是针对于固定鸭舵,而很少有研究舵面偏转过程中导弹的流场及气动特性。
1 数值模拟方法
20世纪80年代初,Steger 等[8]提出了结构重叠网格方法,它依据计算外形的特点,将计算区域划分为若干个子区域,然后分别在这些子区域上独立的生成块结构网格,各区域网格可以相互重叠或覆盖,最后采用网格挖洞的方法使网格间的插值关系建立。滑移网格和动网格都有着各自的缺点:滑移网格仅能够在往复运动或者旋转运动的情况下适用;动网格仅能够用于非结构网格。重叠网格综合了上述两者的长处,它可以使部件在运动过程中网格质量都比较好的情况下很好的表述部件运动。
如图1所示,本文所采用的网格由一套背景网格(Background)和3个部件网格(Component grid)组成,它们之间的边界称为嵌套边界(Overset Boundary Condition)。重叠后的网格如图2所示。建立了一个大的圆柱体的远场作为背景网格,在远场中建立了一个小的圆柱体作为部件网格1,即是弹体的贴体网格。在两个鸭舵处分别建立了一个矩形贴体网格,即是部件网格2和3。
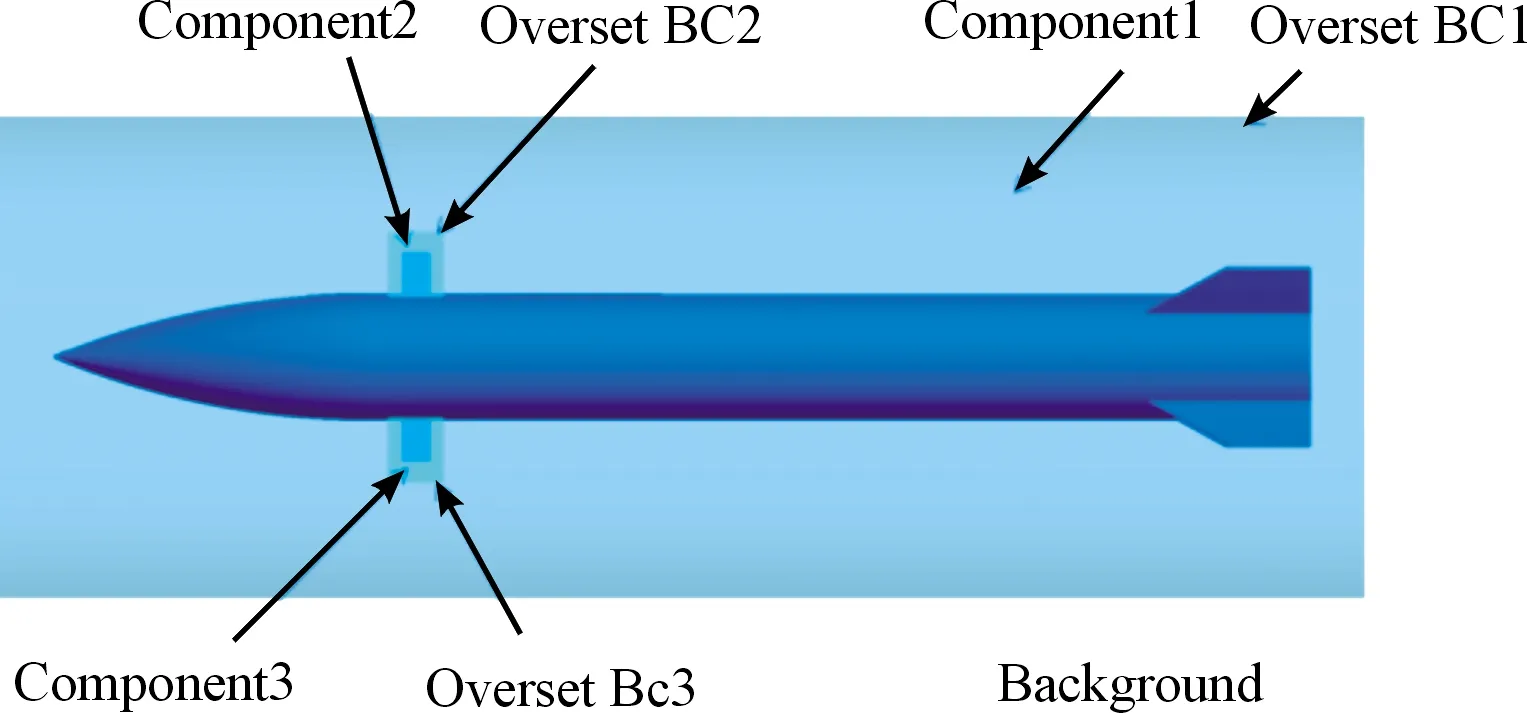
图1 网格示意图
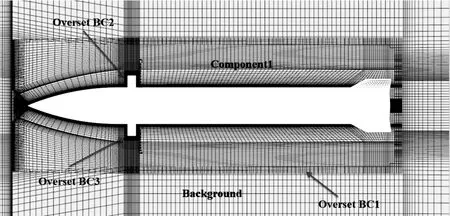
图2 重叠后的网格示意图
使用三维积分守恒型非定常 N-S方程组,由质量守恒方程、动量守恒方程和能量守恒方程组成[9]:
其中:ρ、U、e分别代表气流的密度、速度和单位体积的能量;vm为鸭舵的运动速度;P为静压力;I为单位张量;τ为粘性张量;q为热通量;V和S分别代表控制体的体积分和面积分的积分区域;n为的S外法向单位向量。
离散方法使用有限体积法,雷诺时均方程的对流扩散项使用基于FDS形式的AUSM格式,粘性项使用显式中心差分格式[10]。 湍流模型采用SSTk-ω模型。
主题出版是一种特定的出版形式,除了具备图书的一般功能,主题出版物还要承担重大问题解读与社会舆论导向功能,体现出诸多大众传播的特性。研究主题出版更应注重效果评价,考察议程设置的路径与模式,使传播效果最大化。
对非定常运动的研究,时间步长采用双时间步长技术。在进行计算时,取大约一步鸭舵偏转0.15°这样既可以使流场空间数据保持连续性,又可以使鸭舵有足够的偏转角度,从而在保证计算准确的情况下,能够减小计算量。
2 算法有效性验证
选取AFF标模来进行数值算法的有效性验证,AFF模型作为标准模型多年,在已发表的文献中有充足的风洞实验和飞行试验验证数据进行对比。表1给出计算参数,其与风洞实验条件相同[11]。
本文生成的网格数共500多万,其中背景网格200万,弹体网格300万。
图3给出了本文计算得到的AFF标模的轴向力系数、滚转力矩系数、法向力系数、侧向力系数随攻角的变化规律。从图3可以看出,本文计算得到的气动力及力矩系数数值与文献值在攻角较小(<20°)时吻合得很好,最大误差仅为5%。在攻角较大时,误差达到15%,这是由于当攻角过大时,旋转弹体附近流场变得更为复杂。在小攻角范围内,本文采用的数值计算方法具有较高的可信度。

表1 AFF标模计算参数
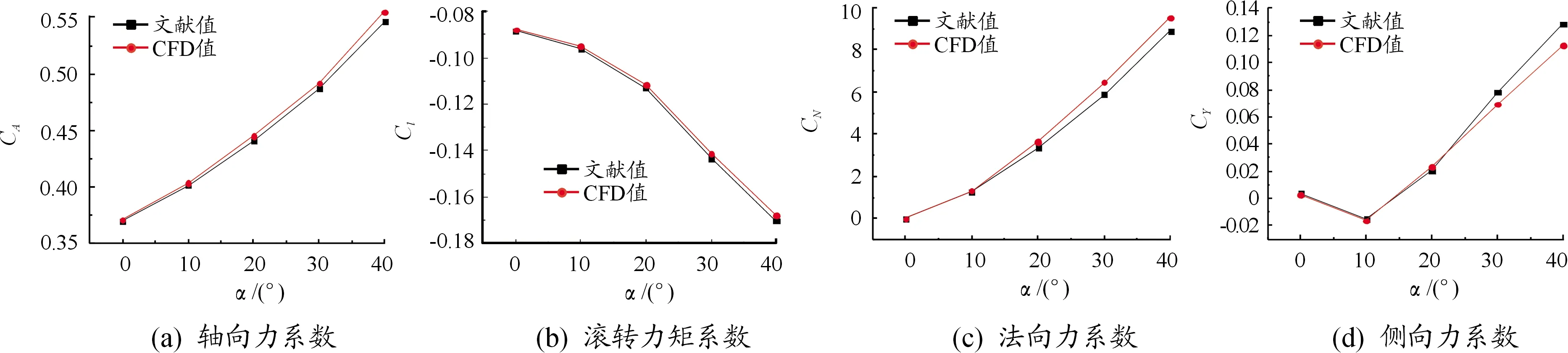
图3 验证曲线
3 数值模拟及结果分析
3.1 计算模型及计算状态
计算模型仍采用AFF模型,给它加上一对矩形鸭舵。选取的计算状态为:来流马赫数Ma=1.6,2.0,2.4;来流温度T0=273.15 K;压强P0=101 325 Pa;来流攻角α=0°、2°、4°;鸭舵偏转速度分别取1/2ω0、ω0、2ω0、4ω0(ω0=26.167 rad/s)。
鸭舵偏转规律如图4所示,一个计算周期采用600个物理时间步长,具体的时间步长由鸭舵偏转速度决定,以保证每一步鸭舵偏转0.15°。使用弹体质心位置作为气动力和力矩计算的参考点,参考面积采用弹体的最大横截面积,参考长度采用弹体直径。
3.2 网格收敛性验证
为了研究网格的收敛性,对来流条件为Ma=2.0,α=0°,舵偏角为0°,分别以网格数N=200万、400万、600万、800万,共 4 种不同网格数对该导弹流场进行数值模拟。计算结果如表2所示,表中N为网格数量,CA为导弹的轴向力系数,将200万、400万、600万网格数量的计算结果,分别与800万网格数量的计算结果相比,从表中可以看出,当网格数量达到600万时,最大差值仅为0.25%,故本文采用600万网格。
3.3 流场分析
图5展示了鸭舵偏转+15°时导弹的压力云图。鸭式布局导弹的超音速流动的特点是导弹前方尖形激波,以及由鸭舵,弹体及尾翼形成的膨胀波,这些冲击与弹体边界层相互作用,最主要的就是由鸭舵引起的漩涡。从图中可以很明显的捕捉到这些特征。
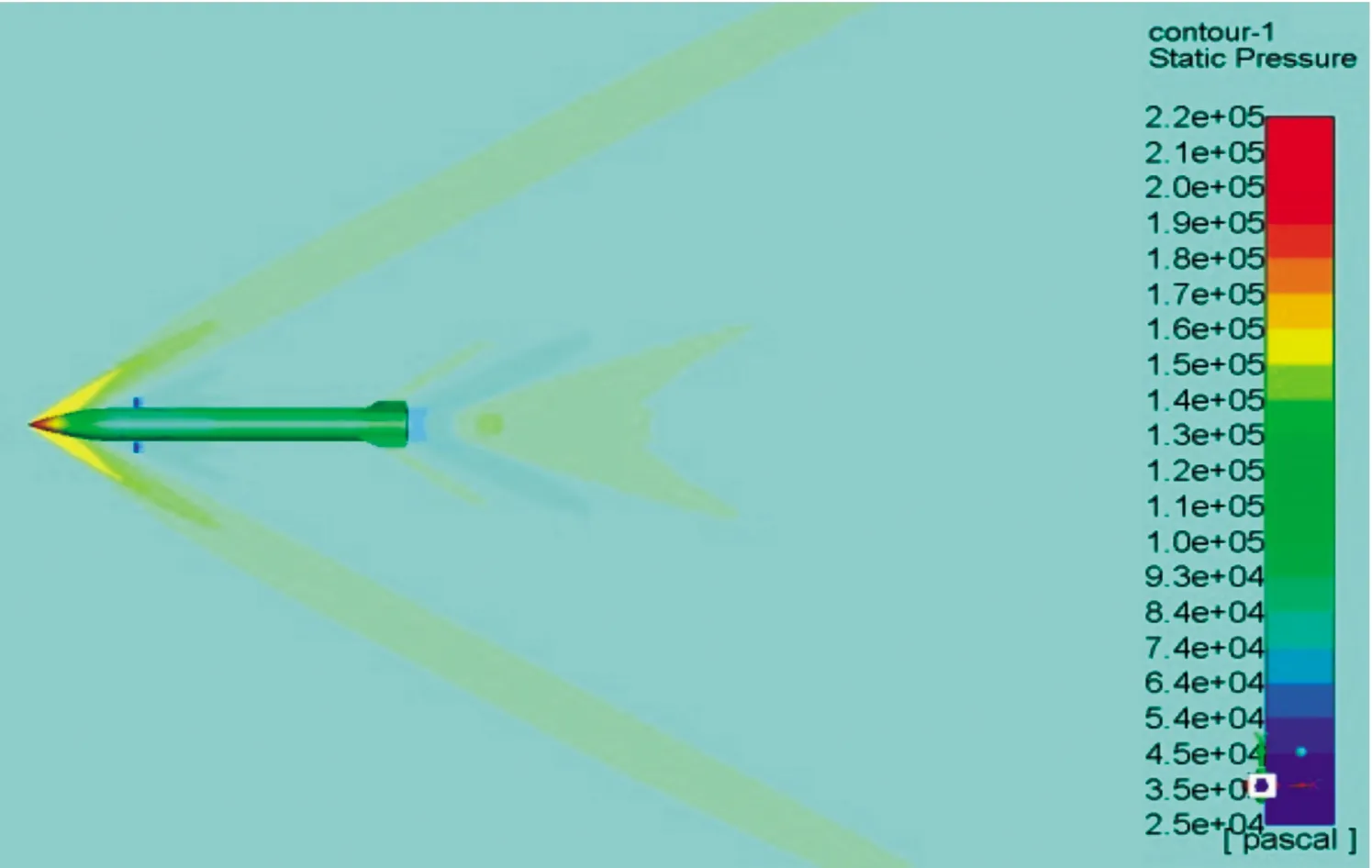
图5 导弹压力云图
鸭式布局导弹的一个主要流动特征就是鸭舵引起的涡流,每个鸭舵引起两个反向旋转的漩涡,一个位于鸭舵尖端的漩涡,称为舵梢涡,另一个位于鸭舵根部,称为舵根涡。舵根涡靠近导弹体,其像下游的发展和对流对导弹的空气动力学性能有重要影响。
图6展示了导弹的涡旋结构。从图中可以看出,随着涡旋向下游发展,涡旋的强度逐渐减弱,到达尾翼时强度已经很小了,但是仍然存在,所以还是会对尾翼产生一些干扰,从而影响导弹的气动特性。对比导弹舵偏角在-15°、-7.5°、0°、7.5°、15°时的涡量图,可以看出最弱的涡旋发生在0°舵偏角处,随着舵偏角的增大,涡旋也越来越强。
3.3 气动特性分析
3.3.1攻角的影响
为了研究攻角对导弹气动特性的影响,取马赫数为2.0,鸭舵偏转速度为ω0,攻角分别取0°、2°、4°。计算结果如图7所示。
从图7可以看出在超音速下,导弹的轴向力系数随着攻角的增大而增大。随着导弹鸭舵的舵偏角的增大,导弹的轴向力系数呈非线性增大。分析导弹的弹体,鸭舵和尾翼提供的轴向力,可以发现同一攻角下导弹的轴向力的改变主要是由于鸭舵提供的轴向力的改变,弹体及尾翼对其的影响很小。不同攻角下导弹的轴向力的变化也主要是由于鸭舵提供的轴向力的变化,弹体和尾翼的影响相对很小。
导弹的法向力系数随着攻角的增大而增大。随着导弹鸭舵的舵偏角的增大,导弹的法向力呈近似线性增大。分析导弹的弹体,鸭舵和尾翼提供的法向力,可以发现同一攻角下导弹的法向力的改变主要是由于鸭舵提供的法向力的改变,弹体及尾翼对其的影响也很明显。不同攻角下导弹的法向力的变化是由导弹的弹体,鸭舵和尾翼相互作用产生的结果,随着攻角的增大,导弹的弹体,鸭舵和尾翼产生的法向力都会增加,从而整体的法向力也会增加。
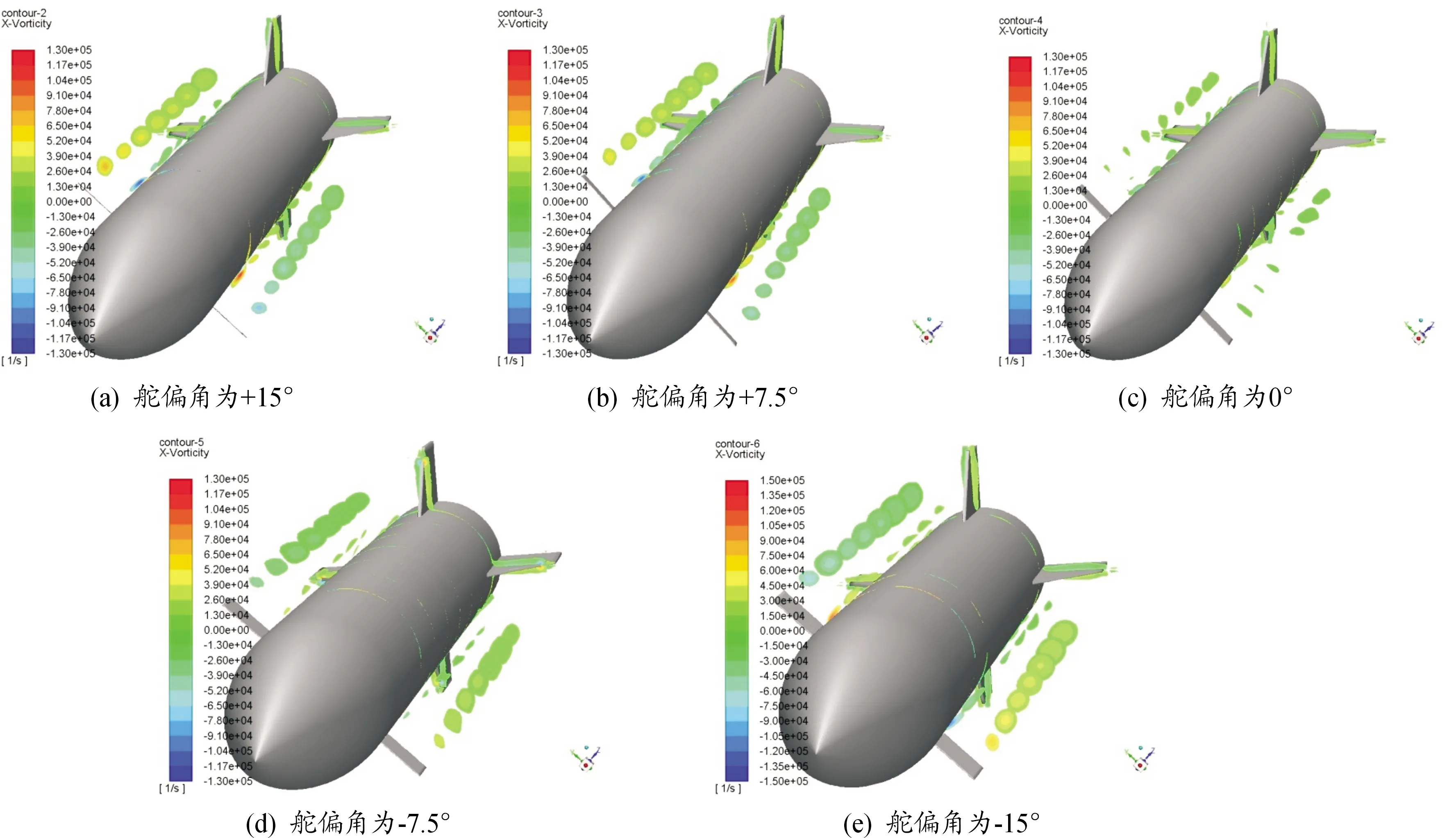
图6 导弹的涡旋结构示意图
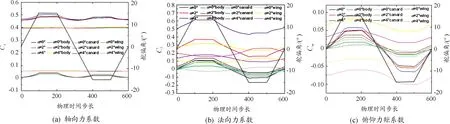
图7 不同攻角下的计算曲线
分析俯仰力矩系数图可以发现俯仰力矩系数的变化在舵面刚往正向偏转时呈现出了不规律性:2°攻角时的俯仰力矩系数要小于0°攻角。分析图中导弹弹体,鸭舵和尾翼提供的分量,导弹的弹体和鸭舵提供正向的俯仰力矩系数,且攻角越大,俯仰力矩系数越大,而导弹的尾翼提供负向的俯仰力矩系数,且攻角越大,俯仰力矩系数越大。而导弹的总体的俯仰力矩系数却不是攻角越大,俯仰力矩系数越大。为了分析产生这种变化的原因,对弹体,鸭舵,尾翼提供的俯仰力矩系数分量在0°,2°和4°攻角的差值进行了比较。如图8所示,弹体和鸭舵提供的俯仰力矩系数在0°和2°攻角的差值和弹体在2°和4°攻角的差值大小基本是一样的。而尾翼提供的俯仰力矩系数的差值却有明显的差别,2°和0°攻角处尾翼产生的差值相对4°和2°攻角处产生的差值要小,即2°攻角处尾翼产生相对较大的负的俯仰力矩系数,所以总的俯仰力矩系数就会变小,从而导致了2°攻角时的俯仰力矩系数要小于0°攻角。
3.3.2来流马赫数的影响
为了研究来流马赫数对导弹气动特性的影响,取攻角为0°,鸭舵偏转速度为ω0,来流马赫数分别取1.6、2.0、2.4。计算结果如图9所示。
从图9可以看出,随着鸭舵的偏转,导弹的轴向力系数基本平行。这说明在超音速下,马赫数大小的改变并不会影响导弹的轴向力系数随鸭舵偏转的变化规律。随着导弹鸭舵的舵偏角的增大,导弹的轴向力系数呈近似抛物线型增大。
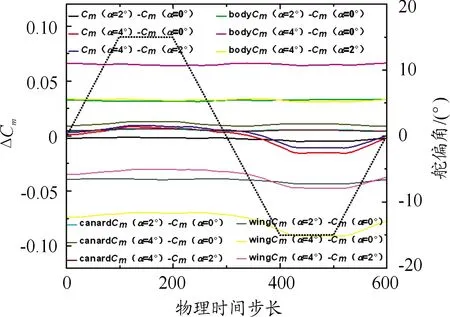
图8 俯仰力矩系数差值曲线
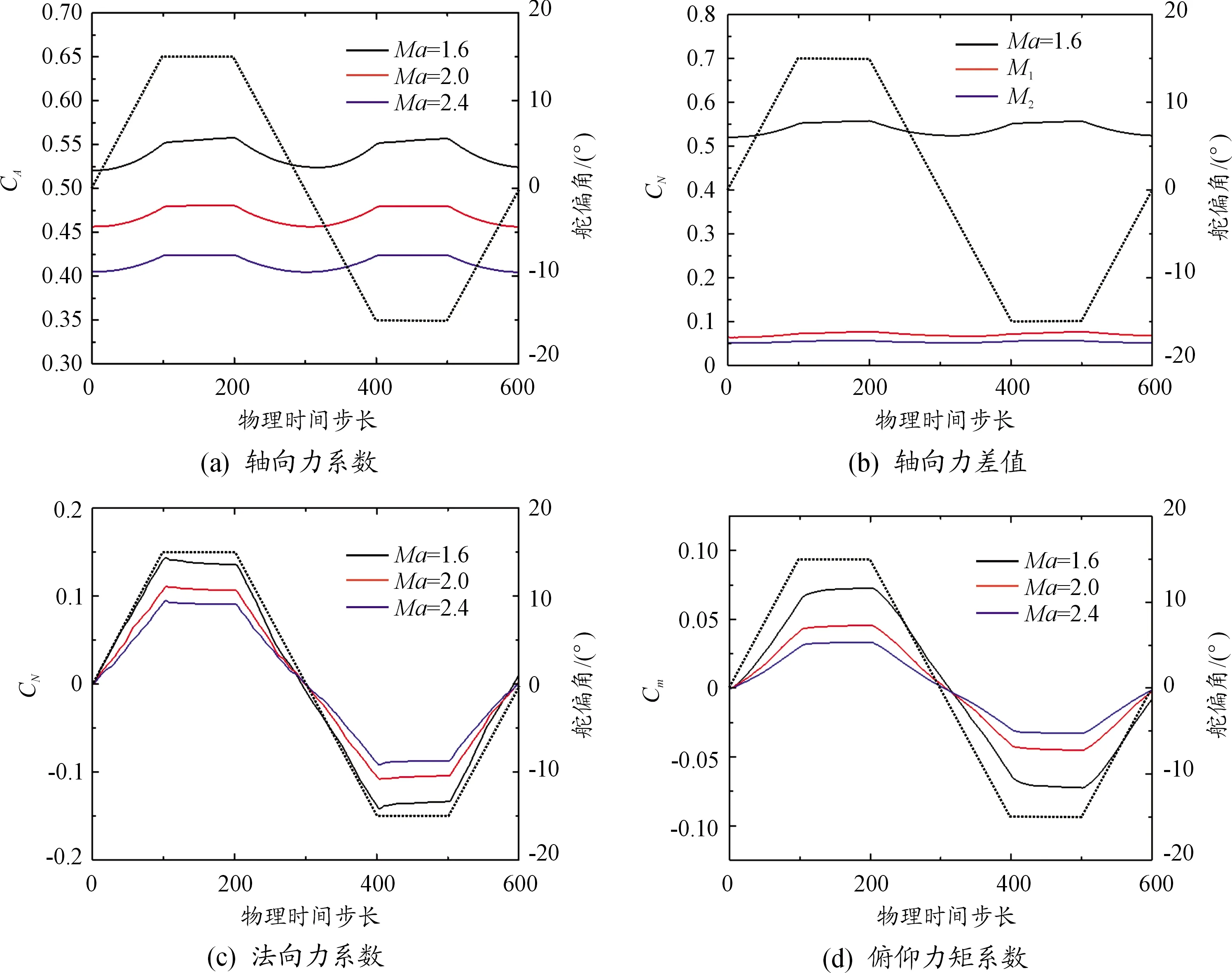
图9 不同马赫数下的计算结果曲线
对比不同马赫数下的轴向力系数,可以看出在超音速下,随着马赫数的增加,导弹的轴向力系数反而是减小的。图9(b)中M1表示Ma从1.6增加到2.0轴向力系数减小值,M2表示Ma从2.0增加到2.4轴向力系数减小值。从图中可以看出,随着马赫数的增加,轴向力系数减小的幅度是逐渐变小的。
随着导弹舵偏角的增大,导弹的法向力系数和俯仰力矩系数都是增大的。并且马赫数越大,导弹的法向力系数和俯仰力矩系数增大的幅度越小,即马赫数的增大会使鸭舵偏转对导弹法向力系数和俯仰力矩系数的变化影响减弱。
3.3.3鸭舵偏转速度的影响
注意到前面所计算得到的结果,导弹在鸭舵位于在+15°和-15°方向,鸭舵停止时,导弹的力和力矩系数仍在变化,且法向力系数是增大的,而俯仰力矩系数是减小的。为了研究这种差异,对不同鸭舵偏转速度的情况进行了研究。计算了鸭舵的偏转速度分别为1/2ω0、ω0、2ω0、4ω0(ω0=26.167 rad/s)时导弹在时间物理步长300~400(即舵偏角0°转到-15°)这一段的气动力和力矩,并对它们进行了比较和分析。
由图10可知,在超音速下,鸭舵向下打舵时,舵偏速度越大,导弹的法向力系数越小。鸭舵静止时可以认为是速度无限小,根据上述规律,可以得到法向力会变大,这和上面鸭舵在-15°处静止所得的结果是一致的。在超音速下,鸭舵向下打舵时,舵偏速度越大,导弹的俯仰力矩系数越大。鸭舵静止时可以认为是速度无限小,根据上述规律,可以得到俯仰力矩会变大,这和上面鸭舵在-15°处静止时所得的结果也是一致的。
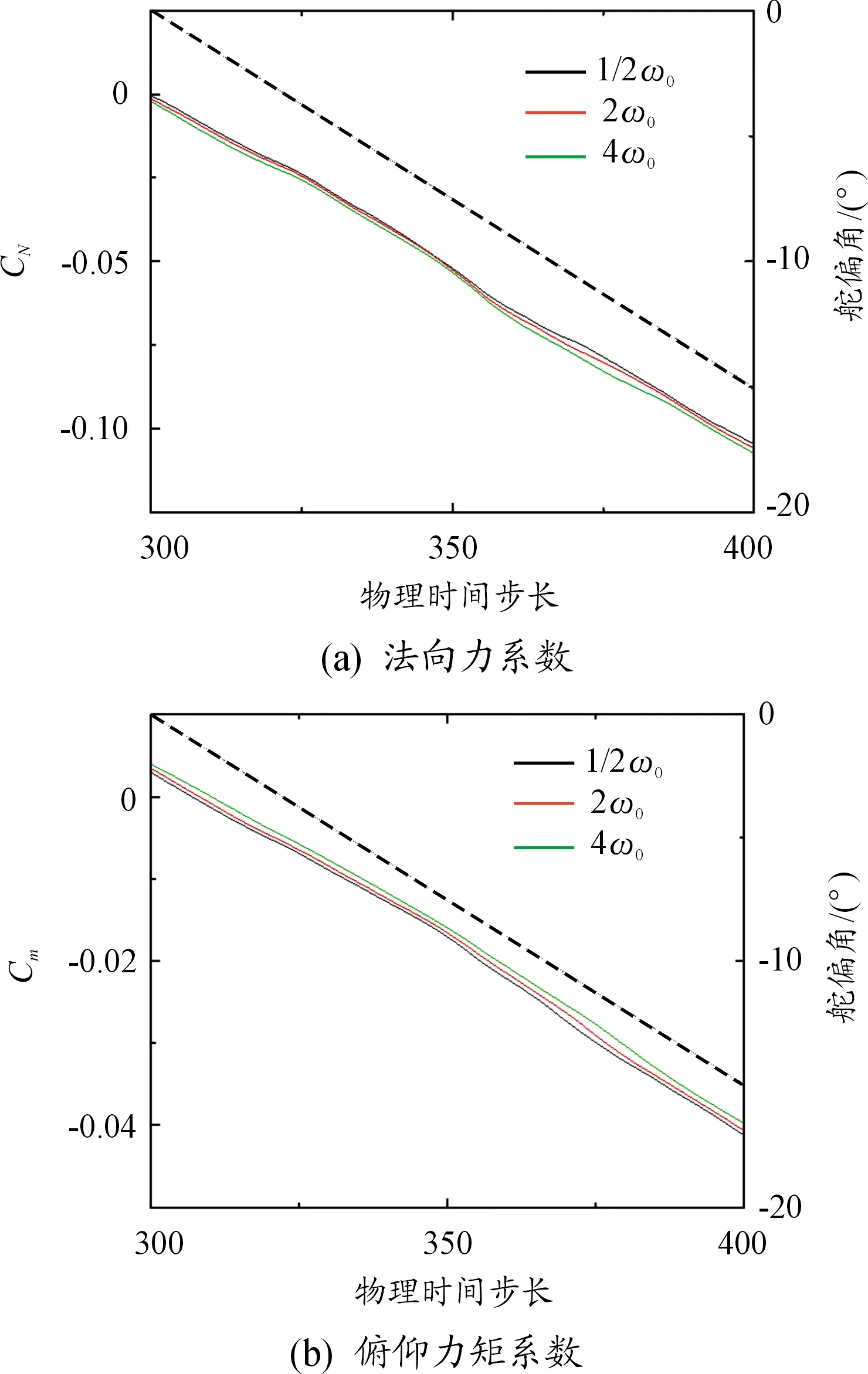
图10 不同舵偏下导弹的气动力和力矩曲线
这说明鸭舵动态偏转计算得到的气动力和力矩和稳态情况下计算得到的结果是有一定的差距的,且鸭舵偏转速度越快,这种差异会越明显。
4 结论
1) 鸭式布局导弹的一个主要流动特征是鸭舵引起的涡流,每个鸭舵引起两个反向旋转的漩涡。随着涡旋向下游发展,涡旋的强度会逐渐减弱,但仍会干扰尾翼,这种影响随舵偏角的增大而增大。
2) 不同攻角下导弹的轴向力系数的变化受弹体和尾翼的影响很小;而法向力系数和俯仰力矩系数的改变是由鸭舵,弹体和尾翼相互作用的结果,尤其是俯仰力矩系数,由于尾翼的影响,有时会产生相反的变化。
3) 超音速下,随着马赫数的增大,导弹的轴向力系数反而减小,且随着马赫数的增大,减小的幅度变小,法向力系数和俯仰力矩系数变大,且马赫数的增大使鸭舵偏转对导弹法向力系数和俯仰力矩系数的变化影响减弱;
4) 鸭舵动态偏转计算得到的气动力和力矩和稳态情况下计算得到的结果有差距,鸭舵偏转速度越快,差异越明显。
