区域活动轮廓模型在高分辨率卫星影像车辆检测中的应用
2020-10-09刘建鑫景雨陶永鹏郭鹏陈恒
刘建鑫 景雨 陶永鹏 郭鹏 陈恒

摘 要 高分辨率卫星遥感图像是一种特殊的数字图像,其复杂程度远高于一般图像。本文重点围绕高分辨率车辆卫星遥感图像中存在大量的噪声,对比度较低以及灰度不均匀性等问题,并且考虑遥感数据量较大的特点,对基于区域活动轮廓模型的车辆检测算法进行研究,最终设计精确、高效及鲁棒性好的车辆目标检测算法。实验结果证明区域活动轮廓图像分割方法在高分辨率卫星影像中可以有效地将车辆目标的形状特征提取出来,进一步提高车辆目标检测的识别率和准确性。
关键词 区域活动轮廓 高分辨率卫星影像 车辆检测
中图分类号:TP391.41文献标识码:A
0引言
随着城市的发展,国内外目前对基于遥感影像的车辆检测尤为重视,在2002年与2006年,国际摄影测量与遥感学会(ISPRS)针对基于遥感的交通检测专题,交流了遥感图像中的车辆检测技术以及交通信息提取等方面的成果。在2016年召开的城市遥感国际联合会议中,针对城市车辆检测的研究也备受关注。
目前,国内外研究人员对遥感图像中的车辆检测已经有了一定成果,但是成果并不完善,仍存在一些问题待解决。在机器学习领域,Gerhardinger等人通过提取车辆的几何特征和光谱特征等,建立了高分辨率车辆检测模型达到车辆检测的目的。曹天扬等利用灰度值变换,改变深色车的颜色特征,然后利用最大类间方差(OTSU)算法将车辆从路面中分离出来。陈光根据车辆的光谱特征信息和几何特征信息提出了一种基于多方向形态变换的车辆检测方法。
根据对国内外的研究成果的分析,目前关于高分辨率遥感图像中车辆检测研究仍然很少,主要原因之一就是影像数据的获取有着很大的局限性。在卫星影像中识别车辆至少需要0.6m分辨率的要求,卫星影像分辨率过低则难以通过目视判读去区分车辆,从而无法对车辆进行精确的识别。本文在现有方法的基础上,提出基于改进的区域活动轮廓模型的高分辨率卫星影像的车辆目标检测方法,对于活动轮廓模型在车辆检测领域的应用,具有较重要的参考价值。借助于区域活动轮廓模型所设计的车辆目标检测系统可以用来辅助交通监控等需要车辆识别等智能交通领域,这些应用和推广必将产生巨大的社会效益和经济利益。
1区域活动轮廓模型的图像分割原理分析
区域活动轮廓模型的典型代表为CV模型,该模型不仅能夠很好的处理边界模糊、边界断裂甚至无边界的情况,也能够自适应的改变拓扑结构,且具有一定的抑制噪声的能力。其原理为:假设图像中同质区域内的灰度是常数,设将图像分割为目标区域和背景区域,各个区域的灰度均值分别为和,则通过最小化Mumford-Shah能量函数来进行图像分割的过程就是寻找最优分割曲线,使得到的分割后图像中的灰度均值和的灰度均值与原始图像之间的方差最小。为此,Chan 和Vese提出了以下曲线拟合能量函数:
式中,为曲线的长度项,为面积项,这两项均是在曲线演化的过程中,Chan 和Vese加入的平滑约束项。实参数,,,0是各个能量项的权重系数。该模型利用了图像的全局区域信息,通过最优化FCV就可以求得最终分割曲线C以及和。
2高分辨率卫星影像的车辆检测技术
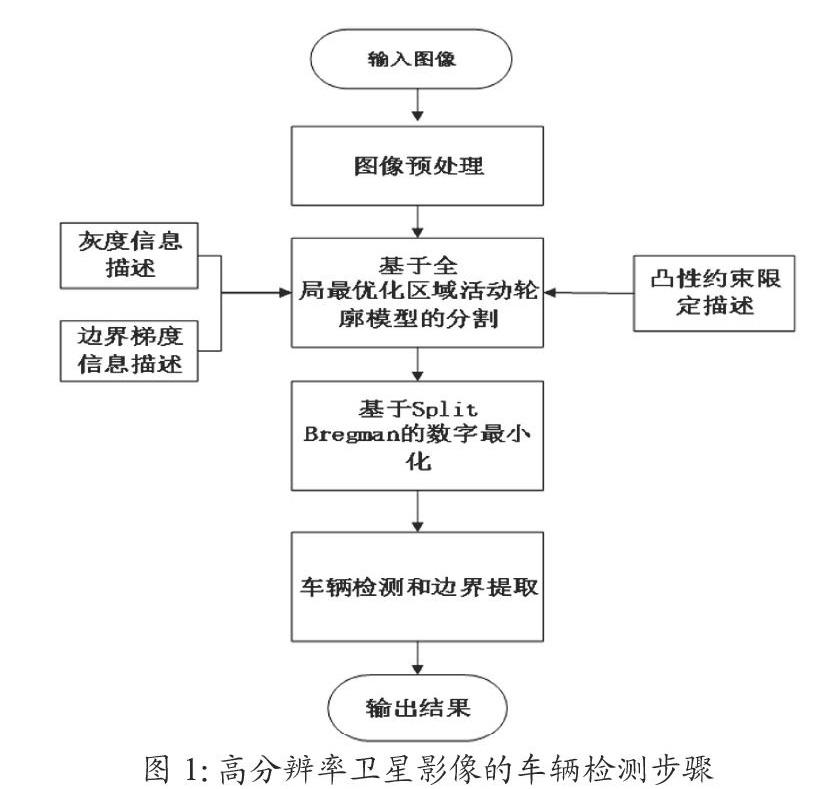
高分辨率卫星影像的车辆检测技术主要由三个步骤来实现,这三个步骤分别是首先进行图像预处理,其次进行基于区域活动轮廓模型的图像分割,然后再进行曲线演化的全局极小解的数字化实现,最后实现车辆目标的检测和边界的提取。图像预处理中主要包括两个步骤,分别是滤波去噪和归一化。目标图像进行预处理之后,可以进行车辆目标的检测和提取,此环节主要使用Jing Y提出的基于改进的全局最优化区域活动轮廓模型。该模型对于具有较强噪声、边界模糊和灰度不均匀性特点的特殊图像有着较强的分割处理能力。在曲线演化的全局极小解的数字化实现环节,使用基于Split Bregman的数字最小化方法,使提出的分割模型不再受初始轮廓的影响,且该算法实现比传统的基于梯度下降的数字最小化方法更简单,曲线收敛更快、更稳定,同时分割结果也更准确。具体检测步骤如图1所示。
3实验结果
3.1实验数据分析
本文所使用的实验数据均来自于中国科学院遥感卫星研究所提供的QuickBird快鸟卫星图片。QuickBird快鸟卫星从450公里外的太空拍摄地球表面上的地物、地貌等空间信息,最大成图比例尺可达1∶1500至1∶2000,其影像分辨率高达0.61米,是目前世界上商业卫星中分辨率最高、性能较优的一颗卫星。基于QuickBird的高分辨率卫星数据影像的应用也非常广泛,包括农业、林业、地质灾害、环境监测和城市规划等[7]。本研究所用实验图片主要包含了大连旅顺南路主干道路的车辆道路情况图像片段,且选择在交通高峰期进行行驶车辆的拍摄。这样,所取样样本数据中包含较多的车辆目标。为了更能进一步验证算法的有效性,仿真实验中,我们选择了48个具有一定背景噪声、对比度低且具有一定的灰度不均匀性的特殊样本数据作为测试图像,图像的大小为32?9 像素到 37?26像素。
我们使用Matlab2016对提出的车辆检测算法进行了仿真实验。实验所用计算机的配置为Intel双核i-8550U处理器, CPU为1.80GHz和1.99GHz,16G内存以及Windows 10操作系统。
3.2实验参数的设置和实验结果的分析
在实验中,实验参数设置为:时间步长,迭代终止阈值,局部区域大小的控制参数,加权全变差范数项的系数,二次惩罚项的系数。
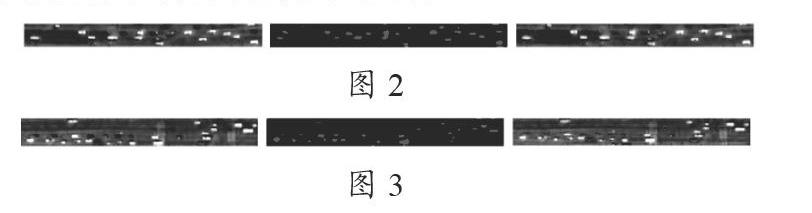
高分辨率卫星的车辆道路图像被分割后,车辆目标区和道路背景区分别对应灰色区域和黑色区域。采用本文所提出的车辆检测方法进行目标图像识别,并将分割前后的图像进行对比可以发现,48个样本数据的平均目标识别率为91.23%,最高识别率为92.31%,最低识别率为87.88%。图2和图3分别给出了其中最高识别率和最低识别率2个样本数据的目标检测结果。其中,图2和图3中第一列为原始车辆道路卫星图片,图像大小分别为34?16像素,37?14像素。第二列为车辆目标分割图像,第三列为原始图像中车辆目标的边缘提取图像。CPU的响应时间分别为0.74秒和0.81秒。实验结果证明基于活动轮廓模型的图像分割方法在高分辨率卫星影像中可以有效地将车辆目标的形状特征提取出来,进一步提高车辆目标检测的识别率和准确性。
4结语
综上所述,高分辨率卫星影像的车辆检测中应用基于改进的全局最优化的区域活动轮廓模型的分割方法,可以实现对车辆目标的准确提取,同时在曲线演化的全局极小解的数字化实现过程中,使用基于Split Bregman的数字最小化方法,不仅使提出的分割模型不再受初始轮廓的影响,且该算法的实现比传统的基于梯度下降的数字最小化方法更简单,曲线收敛更快、更稳定,同时分割结果也更准确。借助于区域活动轮廓模型所设计的车輛目标检测系统可以用来辅助交通监控等需要车辆识别等智能交通领域,这些应用和推广必将产生巨大的社会效益和经济利益。
参考文献
[1] A. G A&D. E A&M.P A.Vehicle detection from very high resolution satellite imagery[J].2012(36).
[2] 曹天扬,申莉.应用光照模型的交通车辆识别定位的高分辨率遥感方法[J].测绘学报,2015,44(01):4-39.
[3] 陈光,门玉英,翟东宇等.一种高分辨率遥感影像车辆检测方法[J].软件导刊,2016,15(07):181-183.
[4] Chan,T.&L.Vese.Active contours without edges[J].IEEE Transactions on Image Processing,2001,10(02):266-277.
[5] 景雨,刘建鑫,刘朝霞,李绍华.Split Bregman算法在遥感图像边缘检测中的应用研究[J].计算机科学,2017,44(12):310-315.
[6] Goldstein,T.&X.Bresson&S.Osher.Geometric Applications of the Split Bregman Method: Segmentation and Surface Reconstruction[J].Journal of Scientific Computing,2010,45(1-3):272-293.
[7] 钱家航,王金亮,马如彪,邓钰.基于QuickBird影像城市道路特征语义信息提取[J].遥感技术与应用,2014(04).
