基于树莓派的四轮独立电驱动监控系统设计
2020-10-09赵风财肖广兵
赵风财 肖广兵


摘 要: 本文设计了基于树莓派的四轮独立电驱动监控系统,主要由驱动控制系统、电池管理系统、数据处理模块、上位机控制模块等组成。系统使用ESP8266WIFI通讯模块实现传感器、控制器和上位机之间的信息交互,以树莓派芯片作为系统控制核心,进行数据处理。本系统能够方便用户对车辆进行综合性能的验证和评估,获取理想的实验数据,具有结构简单、数据准确、容错率高的特点。
关键词: 树莓派;四轮独立电驱动;数据监控
中图分类号: TP39 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.08.023
本文著录格式:赵风财,肖广兵. 基于树莓派的四轮独立电驱动监控系统设计[J]. 软件,2020,41(08):78-82
【Abstract】: This paper designs a four-wheel independent electric drive monitoring system based on raspberry PI, which is mainly composed of drive control system, battery management system, data processing module, upper computer control module and so on. The system uses ESP8266WIFI communication module to realize the information interaction between the sensor, the controller and the upper computer. The raspberry PI chip is used as the system control core system for data processing. The system is convenient for users to verify and evaluate the comprehensive performance of the vehicle and obtain ideal experimental data. It has the characteristics of simple structure, accurate data and high fault tolerance.
【Key words】: Raspberry PI; Four - wheel independent electric drive; Data monitoring
0 引言
电动汽车因其在解决大气污染,能源短缺等问题上表现突出,目前已成为体现国家可持续发展和科技创新的战略需求[1]。其中四轮独立电驱动车辆是一种电池组供电,汽车前后轮都有动力的车辆,可按行驶路面状态不同而将发动机输出扭矩按不同比例分布在前后所有的轮子上,以提高汽车的行驶能力[2]。四轮独立电驱动车辆能够实现整车运动状态参数的实时评估、有更加精确的ABS/TCS/ESP動力学控制,具有电机响应快,精度高的特点,因此在汽车控制方面拥有传统汽车无法取代的优点。
目前国内外对四轮独立电驱动系统已经取得了一些成果,李克强[3]等人提出一种基于模糊动态滑模理论的控制方法以实现防滑控制;靳立强和王庆年等建立了四轮独立电驱动车辆的18自由度动力学模型,帮助车辆实现防滑控制[4]。但关于四轮独立电驱动车辆的研究仍然有许多问题亟待解决,如各轮转矩协调不佳会导致整车动力学容易失衡、回路中的网络时滞变大会导致控制系统的闭环或开环的回路传输时间变长、以及如果车身关键传感器或者执行器失效,车辆动力学瞬间会失衡。
针对四轮独立电驱动车辆发展较晚、相关成果不充足的特点,本文设计了四轮独立电驱动监控系统,通过四轮独立电驱动概念车上安装的监测车辆和电池状态的传感器,收集准确且全面的数据,对车辆运行状态进行实时监控,便于对车辆进行综合性能的验证和评估,使得用户可以及时发现问题,获取理想的实验数据,促进四轮独立电驱动车辆相关成果的产生。
1 系统设计
四轮独立电驱动监控系统由数据收集模块、上位机模块、通讯模块和数据处理模块构成。数据收集模块包括驱动控制系统与电池管理系统,以多个监测车辆和电池状态的传感器为基础,当车辆开始运行后,开始稳定的获取包括车速、车轮转矩和转向角、电池电压和电流在内的多个重要数据,并通过通讯模块组建的无线通讯网络把数据发送到上位机模块,经过数据处理,在PC端界面上进行直观的数据显示。
上位机模块同时承担着监控系统与用户的交互,用户可以控制系统与每个车轮传感器的连接状态,便于进行相关的实验、可以控制供电系统进行电池能量均衡,以减小各个电池之间电量差异、可以选择有效的实验数据进行保存,便于进行数据的对比分析[5]-[6]。本系统能够对独立四轮电驱动车辆的重要数据进行实时监控,在丰富的数据反馈的基础上,满足用户的各种实验需求。系统结构图如图1所示。
2 硬件电路设计
四轮独立电驱动监控系统的硬件系统主要包括传感器模块、树莓派控制模块和无线通信模块等。本系统由ESP8266无线WIFI模块组建无线通讯网络,能够使传感器、控制器与上位机之间保持信息交互,实现监测数据和操作指令的传递;传感器模块是系统功能实现是基础,起到对车辆行驶和电池状态的实时监测的作用,本系统使用霍尔效应式车速传感器测量测速、扭矩光电编码器测量车轮转矩、以及高压隔离与采样的方法监测电池组电压;控制模块选用树莓派4B作为核心元件,对传感器数据进行分析、处理,并完成用户发出的操作指令。
2.1 传感器模块设计
传感器模块需要对车速、车轮转矩、转向角、电池电压,电流和温度进行数据收集,并实时发送给信息处理器和上位机。霍尔效应式车速传感器利用霍尔效应的原理制成,由一个几乎完全闭合的包含永久磁铁和磁极部分的磁路组成,实现对车速的监测[7];而光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,能够获取准确的车轮转矩数据[8]。
系统采用高压隔离与采样的方法监测电池组电压,在电池组状态信息进行实时监测时,要实现对电池电压采样通路的高速开关控制,同时解决前端采样点路与后端数据处理电路之间的共地问题。电路原理图如图2所示,采用AQW214S光耦继电器作为高压隔离器件,同时也作为电压采集系统的高速信号采样器件,R1=2R2,电路中电容C1为去耦电容,电阻R5为限流电阻,电阻R4用于保证电路可靠工作[9]。
2.2 树莓派控制模块
本文使用树莓派作为四轮独立电驱动监控系统控制模块的核心单元。树莓派是一款基于ARM的单片机电脑主板,具有体积小、效率高、功能强大等特点,新一代树莓派4B搭载1.5 GHz的64位四核处理器和统一的Linux开源操作系统、全吞吐量千兆以太网、支持Bluetooth 5.0和BLE、双micro HDMI输出、支持4K分辨率、存储系统增加了双倍数据速率支持、支持C、C++、Python等语言编程[10]。
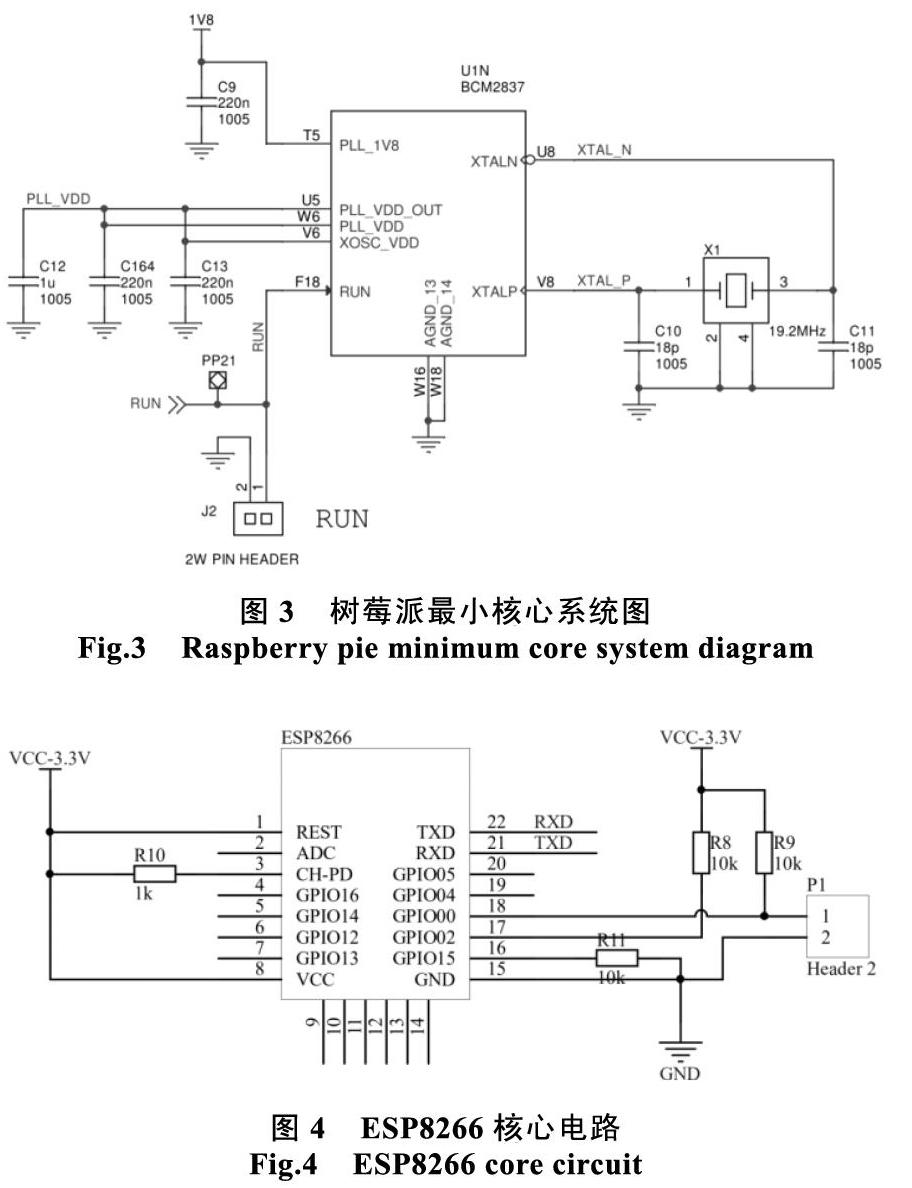
树莓派4B的主控制器采用博通BCM2711的1.5 GHz四核处理器,电路图如图3所示,采用ARM Cortex A72架构、500MHzGPU和LPDDR4内存,性能相较树莓派3B+提升了近50%。在通讯方面,树莓派采用USB串口通信和GPIO引脚通信两种方式实现,提供2个Micro HDMI 2.0接口(4K 60FPS)和40针GPIO引脚,通过在树莓派上进行程序设计,运用相关的技术即可实现数据的输入输出。
2.3 无线通信模块
通讯模块是四轮独立电驱动监控系统的重要模块,能够将系统各部分连成整体,如图4所示,本文采用ESP8266WI-FI芯片作为核心元件,构建无线通讯网络。ESP8266是一款Wi-Fi通讯模块,具有传输速度快、低功耗的特点,专为物联网应用设计,可将用户的物理设备连接到Wi-Fi 无线网络上,实现联网通信。ESP8266芯片可以通过AT指令配置,和单片机上的串口进行通信,利用WI-FI进行数据传输,ESP8266芯片内置TensilicaL106 32位 RISC 处理器,CPU时钟速度最高有160 MHz,工作模式有Station模式、AP模式和AP兼Station模式[11]。
3 系统软件设计
系统软件设计采用Visual Basic6.0软件开发设计,主要包括驱动控制程序设计、电池管理程序设计和辅助功能设计。
四轮独立电驱动监控系统的流程图如图5所示,用户登录成功后进入功能区,系统的功能主要分为驱动控制、电池管理、设备检测、历史数据和系统设计五个部分,其中驱动控制和电池管理是系统的核心功能,能够进行数据显示、充放电监测和电池状态诊断,用户可以查看车辆运行时的車速变化、各个车轮的转矩与转向角变化、电池充放电时的实时电压电流变化,控制电池能量均衡等;设备检测和历史数据的功能分别对应检测上位机通讯状态并控制与各传感器之间的连接、保存有效的实验数据供后续查看。
系统主界面如图6所示,主要由驱动控制、电池管理、设备检测、历史数据和系统设计五个部分的入口按钮组成,右上方显示实时的日期和时间,点击右下方红色按钮退出程序。
3.1 驱动控制设计
驱动控制界面包括车辆状态界面、实时车速界面、车轮转矩和转向角界面等。车辆状态界面如图7所示,界面上方是独立四轮驱动车的底盘模型,跟随试验车的运动状态实时变化,给予用户直观的感受,下方进行实时的数据显示,包括当前车速和加速度等,核心数据是各个车轮的转矩、转向角和网络时滞。用户可以根据此界面进行数据观察和对比,发现试验车行进中的问题,包括四轮转矩是否一致、网络时滞是否过大等。右下角是功能选择区,用户可以刷新当前状态、进入实时车速界面、选择有效的数据进行保存,被保存的实验数据在历史记录中查看[12]。
实时车速界面如图8所示,车速传感器获取试验车行进的速度和加速度,发送到数据处理模块,经过分析、处理,在上位机界面绘制出车辆实时车速折线图,右侧显示车辆行驶时间和当前是速度与加速度。车轮转矩和转向角界面如图9所示,页面主体分别是车轮实时转矩和转向角的折线图,页面右侧显示当前实时的转矩和转向角,用户通过车轮选择,可以直观的查看相关的数据,在折线图中,如果试验车沿着直线行驶,转矩和转向角都接近于零,图中的出现明显升降的时刻便说明试验车在进行转弯。
3.2 电池管理设计
电池管理是本系统的核心功能之一,程序设计主要包括主界面、供电监测、充电监测和电池状态界面等。为防止电池发生过充电或过放电现象,系统会监测每块电池实时的电压和电流、温度、及电池组总电压,并及时预警[13]。
电池管理主界面如图10所示,主要由供电监测、充电监测、状态诊断和电池参数四个部分的入口按钮组成,右上方显示实时的日期和时间,点击右下方红色按钮退出程序。
供电监测界面如图11所示,页面上方显示电驱动车辆的电池向电动机供电的示意图。界面左下方是数据显示区,传感器检测电池组供电时的实时电压、电流和温度通过无线网络上传至上位机,在供电监测界面显示出来,使用户可以准确掌握电池组的工作情况,防止发生电池组过放电的现象发生,延长电池组的可使用时间。右下方是功能区,用户可以刷新电池供电数据、进入电池状态页面、查看电池组的续航能力,方便用户合理控制电池的使用[14]。
充电监测和电池状态界面如图12所示,在充电监测界面,右侧显示充电中实时的电池电压和电流、和温度。以锂电池为例,充电时先保持恒流,这个阶段电压上升,当电压升到4.2V时,进入第二阶段,即恒压充电,此时电流下降,当电流下到一定阶段时,电池充电完成。系统进行充电状态的监测,使得用户可以及时发现充电异常现象,延长电池的可使用时间。右侧显示显示当前电池已充电和充满仍需要的时间,帮助用户合理控制充电时间[15]-[16]。
在电池状态界面中,用户可以查看电池组中每块电池的电压和剩余电量,挑选出工作不正常的电池,使电池组可靠高效的运行。电池在大量生产时质量不易把控,出厂时电池中的电量便会有微小的差异,随着老化,污染物侵蚀等因素,电池间的电量差异会越来越大,因此,本系统提供能量均衡的功能,即单体电池均衡充电,减小各个电池之间电量差异[17]。
3.3 辅助功能设计
系统的辅助功能包括设备检测和历史记录,使软件功能更加丰富,为用户提供更多便利。设备检测界面如图13所示,用户可已经检查通讯状态并控制与车轮传感器的连接状态,在界面上方显示目前所连接通讯网络的IP地址和密码,用户可以选择断开和连接。在界面下方显示已连接到的车轮传感器,用户可以刷新连接、断开指定传感器的连接。页面另一个重要功能是设备诊断,系统可以根据传感器检测的数据,分析筛选出数据缺少或不准确的设备,反馈给用户,保障系统的正常运行[18]。
历史数据界面如图14所示,用户通过日期选择,获取当天保存的实验数据,根据开始时间和实验时长找到目标实验,点击查看后会显示当次车辆运行时的包括车轮转矩和转向角、网络时滞、电池的电压、电流和温度的数据,供用户进行观察、整合,获取相关的实验结果。
4 结论
本文设计了基于树莓派的四轮独立电驱动监控系统,通过四轮独立电驱动概念车上安装的监测车辆和电池状态的传感器,获取包括车速、车轮转矩和转向角、电池电压和电流在内的多个重要数据,对车辆运行状态进行实时监控。系统使用ESP8266WIFI通讯芯片实现传感器、控制器和上位机之间的信息交互,以树莓派芯片作为系统控制核心进行数据处理。本系统能够方便用户对车辆进行综合性能的验证和评估,获取理想的实验数据,具有结构简单、数据准确、容错率高的特点。
参考文献
[1] 来鑫, 陈辛波, 方淑德, 等. 四轮独立驱动-独立转向电动车辆动力学控制现状[J]. 河北科技大学学报, 2016(4): 322-328.
[2] 李晓燕. 导说仿评“四轮驱动”教学模式的构建及其实践[J]. 湖南广播电视大学学报, 2011(2): 6-9.
[3] 孙文庆. 基于ADAMS的柔性底盘运动模拟及转向特性研究[D]. 西北农林科技大学. 2017.
[4] 王庆年, 张缓缓, 靳立强. 四轮独立驱动电动车转向驱动的转矩协调控制[J]. 吉林大学学报(工学版), 2007(5): 985-989.
[5] 赵华慧, 黄兆飞, 杨镇瑜. 四轮独立驱动电动汽车性能仿真方法研究[J]. 时代汽车, 2019(12): 64-65.
[6] 雷钢. 基于WebGIS的新型车辆监控系统设计[J]. 软件, 2016, 37(3): 123-126.
[7] Wang Rongrong, Wang Junmin.Fault-tolerant control with active fault diagnosis for four-wheel independently driven electric ground vehicles [J]. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4276-4287.
[8] 常放. 基于嵌入式平臺的目标跟踪控制系统[D]. 电子科技大学, 2011.
[9] 肖广兵, 孙宁, 陈勇, 等. 便携式HEV动力电池故障诊断系统的设计[J]. 电子技术应用, 2013, (10): 84-87.
[10] 贾婧蕊, 秦婵婵, 胡圣波, 等. 基于树莓派的车牌识别系统的设计与实现[J], 2019, (12): 24-27.
[11] 陈世游, 陆海, 张少泉, 等. 总线网络实时监控系统的设计与实现[J]. 软件, 2018, 39(10): 74-78.
[12] 胡始弘, 杜睿. 一型电动船总体设计和电池选型探讨[J]. 船舶, 2019, (3): 26-31.
[13] Ono E, Hatto R Y. Vehicle dynamics integrated control for four-wheel-distributed steering and four-wheel-distribut ed traction/braking systems[J]. Vehicle System Dynamics, 2006, 44: 139-151.
[14] 葛英辉. 轮式驱动电动车控制系统的研究[D]. 浙江大学, 2005.
[15] 张利鹏, 李亮, 祁炳楠, 等. 分布式驱动电动汽车转矩自适应驱动防滑控制[J]. 机械工程学报, 2013, 49(14): 106-113.
[16] 陈婕, 金馨. 基于极限学习机的锂电池健康状态预测[J]. 软件, 2018, 39(2): 191-196.
[17] 王博. 四轮独立电驱动车辆实验平台及驱动力控制系统研究[D]. 清华大学, 2019.
[18] 童群. 数字化车间生产现场数据采集与智能管理研究[J]. 软件, 2018, 39(8): 178-180.
[19] 崔智, 王天祺, 房远, 等. 基于模糊控制对多轮独立电驱动车辆驱动形式的研究[J]. 现代信息科技. 2018, (12): 167-169.
[20] 赵秋实, 史燕中, 方志, 等. 基于频繁集的伴随车辆检测算法研究[J]. 软件, 2016, 37(4): 69-73.
