基于氧化石墨烯的ST-cut 声表面波高性能湿度传感器
2020-10-09蒋媛媛王金龙龙宫頔郭袁俊
蒋媛媛,王金龙,龙宫頔,郭袁俊
(1. 电子科技大学 电子科学与工程学院,四川 成都 610054;2. 电子科技大学 物理学院,四川 成都 610054)
近年来,开发了基于各种原理的湿度传感器,包括电阻或电容[1]、微波或超声波[2]、声表面波[3]湿度传感器等。声表面波(SAW)湿度传感器不仅具有精度高、体积小、稳定性强等优点,而且有稳定的输出频率,易于被模拟信号和数字信号接收器接收[4],易于被远程传输、接收、分析等,使 SAW 湿度传感器通过自动控制技术在恶劣环境下检测湿度成为一种可能方案。
氧化石墨烯(GO)为一种碳纳米材料,具有大的比表面积和羧基等含氧亲水官能团,非常适合于湿度传感[5]。石墨烯衍生物(如氧化石墨烯)比纳米结构金属氧化物、导电聚合物和碳纳米管具有更大的表面积和更多的化学活性位点[6]。此外,它们的化学和电学性质可根据其生长参数进行调整。
SAW 湿度传感器的一个研究重点是选择良好的传感层材料。在 SAW 器件上涂覆不同的材料,如聚合物、金属和金属氧化物等可用来检测湿度和特定气体[5,7]。目前,尚没有基于GO 传感膜的SAW 湿度传感器的报道。本文提出了一种基于GO 涂层ST-cut 石英基底的SAW 湿度传感器。GO 传感膜具有大比表面积和亲水基团,这有利于传感膜的透水性和保水性,并且可以增强SAW 器件的质量负荷效应。
1 实验
1.1 SAW 谐振器
设计的基于 ST-cut(42°75ʹ)石英衬底的 SAW 谐振器结构如图1 所示,用于湿度传感。SAW 谐振器由沉积在石英衬底上的输入和输出叉指换能器(IDTs,30对)、反射光栅(100 对)、涂覆的传感膜组成。IDTs的指宽为4 μm,孔径为3 mm。设计的SAW 谐振器的中心频率为200 MHz。当时变电信号输入IDT 时,电极的交替极性导致压电材料的周期性压缩和稀释,从而产生声波。激发的声波沿IDT 两侧的材料表面行进,经传感膜并最终入射到输出 IDT,被转换回电信号。传感膜的任何理化特性变化都将改变声波的传输速度与相位,导致最终输出频率的变化。

图1 SAW 谐振器结构
1.2 GO 膜的制备
GO 是使用改进的 Hummers[8]方法生产的。在25 ℃室温下将制备的GO 溶解在去离子水中,然后超声处理1 h,得到含量为2 g/L 的GO 水溶胶;采用旋涂法将制备好的GO 水溶胶以6000 r/min 的旋转速度旋涂在SAW 基板上,30 s 后,在80 ℃下干燥5 min,重复 5 次,形成均匀的 GO 薄膜;最后,将涂覆 GO薄膜的 SAW 谐振器连接到相应的振荡器电路,组成SAW 湿度传感器。
1.3 实验装置
实验装置见图 2。将实验环境的温度和湿度分别控制在 25 ℃和30%相对湿度。根据国际标准中饱和盐溶液标准相对湿度表,将5 种不同的饱和盐溶液填充到5 个体积为20 L 的测试室中,以控制内部的相对湿度。封闭腔室内的湿度不会快速变化,因为腔室体积很大,并且快速从小间隙推入。通过将GO SAW 湿度传感器快速推入不同湿度的封闭腔室并快速取出,实现传感器表面湿度的快速变化。
使用频率计(Agilent 53210A)测量SAW 传感器频率的偏移。场发射扫描电子显微镜(FE-SEM,FEI Inspect F50)用于表征GO 的表面形态。使用傅里叶变换红外光谱(FTIR,Nicolet IS 10)表征GO 材料的表面官能团。
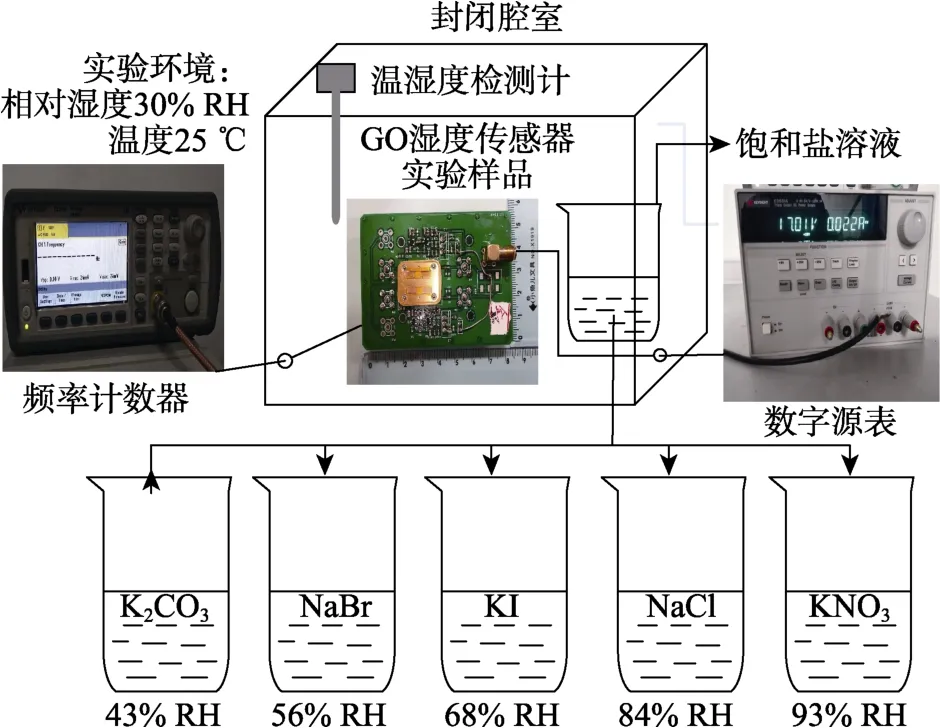
图2 实验装置
2 结果与讨论
2.1 GO 传感膜的表征
图 3(a)为SAW 谐振器表面的 GO 膜的SEM 图。GO 膜表面呈现为细密的起伏褶皱状,这将大大增加传感膜的比表面积,能提供更多的吸附位点。图3(b)为GO 材料的傅里叶变换红外光谱(FTIR)图,检测到具有不同振动模式的含氧基团,包括环氧化物(C—O—C,1 029~1 629 cm-1)、羧基(COOH,1 629 cm-1)、基羟基和酚醛(边缘羟基)(C—OH,2 924 和3 341 cm-1)。结果表明GO 表面的含氧官能团使其具有极强的亲水性,可与水分子有强烈相互作用。
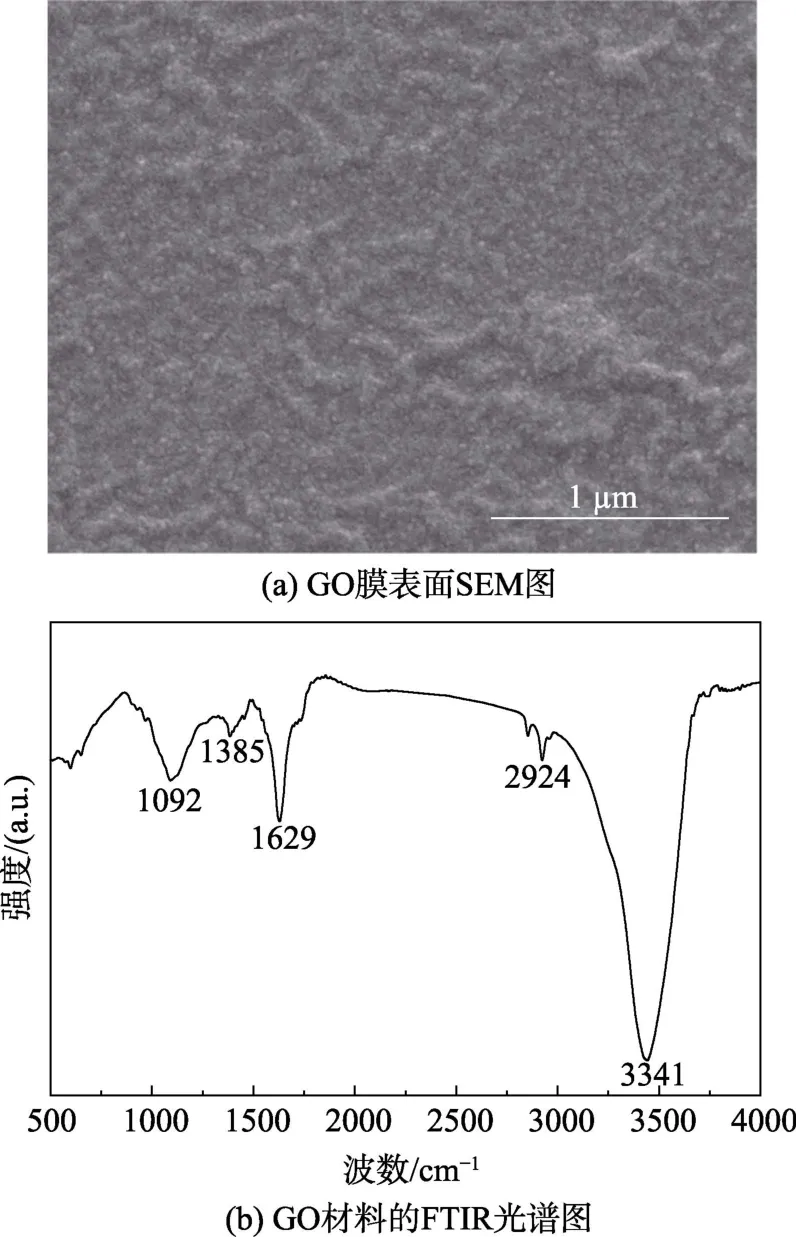
图3 GO 材料 SEM 图和FTIR 光谱图
2.2 实验结果与传感机理
实验中检测到的 SAW 频移主要是受波的传播速度的影响。声表面波传播速度的改变不仅受环境因素影响,还受质量负载效应、电负载效应和黏弹性负载效应等工作机制影响[9]。在实验过程中,控制温度和压力保持恒定,水分子的吸附不会使传感膜变硬或变软,所以弹性负载也保持恒定。当传感器工作在高频时,GO 薄膜的电导率对相对湿度不敏感,传播速度受电导率的影响很小。这样,质量负载效应是声表面波湿度传感器传播速度变化的主要原因。
质量负载效应是指GO 膜吸附水分子,使SAW 传感膜质量增加。中心频率的变化(Δf)与传感膜薄质量负载的变化(Δm)之间的关系可以描述如下[10]:

式中,Cm是质量敏感因子,f0是声表面波传感器的中心频率,Δm是感测层的质量变化,A是感测区域。由等式的负号可知,GO 薄膜吸附水分子增加的质量负载将导致负频移的产生。
图4 为GO SAW 传感器频移与相对湿度关系。

图4 传感器频移与相对湿度的关系图
由图4 可知,当RH 从30%增加到43%、56%、68%、84%和93%时,传感器的频移分别为4.1、8.9、15.6、25.5 和40.2 kHz。当 RH 恢复到 30%时,振荡频率恢复到初始值。这表明传感器具有显著的基线稳定性。
式(1)表明,该传感器的质量变化与传感器的谐振频率偏移具有线性关系。然而实验结果表明:在低相对湿度下,频率偏移与相对湿度的关系近似为线性关系;在高的相对湿度下,频率偏移与相对湿度的关系近似为指数关系。由于GO 膜的质量增加是由于水分子的吸附,在低相对湿度下,水分子主要集中于GO膜的表面;而在高相对湿度时,水分子在GO 膜表面形成一层水凝膜,水凝结导致的阻尼效应以及水凝膜对水分子更好的吸附效果导致频移随湿度呈指数式增长。因此,GO 膜对水分子的吸附可分为表面吸附效应和水凝结效应。传感器对相对湿度RH 的频率响应可用以下近似公式描述:

用 Matlabshu 数据拟合得系数常数α、β、γ和A分别为-0.332、-374.5、0.117 和 11 650。
拟合结果与实验数据相匹配,精度高(R=0.9965),如图5 所示。拟合函数是线性函数和指数函数的加权和,分别对应于表面吸附效应和水凝结效应。在低相对湿度下,传感器的频移主要由GO 膜的表面吸附引起,随着相对湿度的增加,水凝结的效果急剧增加。
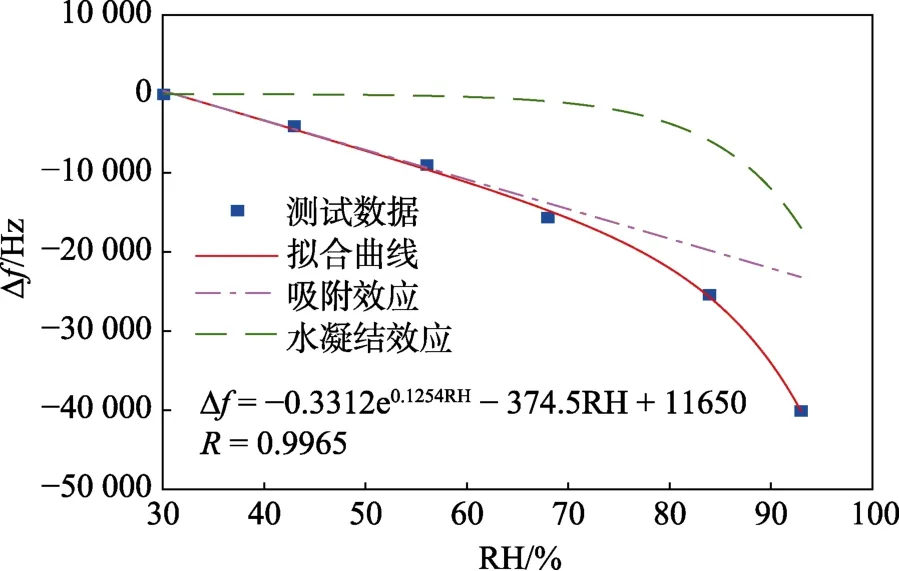
图5 数据的非线性拟合结果
SAW 湿度传感器容易受到温度变化的影响,从而影响测试的准确性。然而,使用的压电材料ST-cut 石英晶体的温度系数几乎为零。为了验证湿度传感器对温度不敏感,检测了传感器谐振频率的温度范围为25~60 ℃的变化。图6 表明,随着温度的升高,传感器的频率略有下降,频率变化与温度变化具有良好的线性关系。
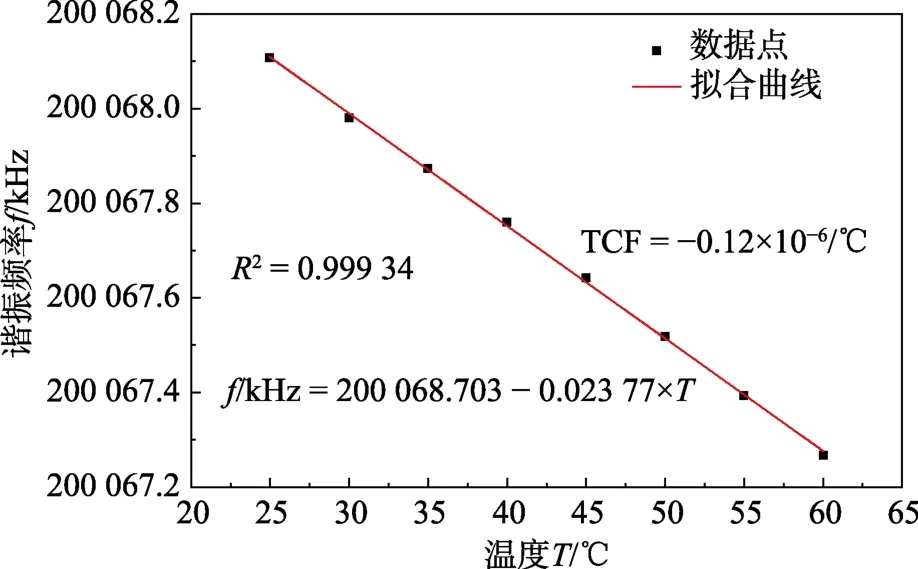
图6 传感器谐振频率随温度的变化关系
温度系数(TCF)通常用于表征声表面波传感器对温度变化的敏感性,定义为

式中,f0为200 MHz,Δf和ΔT分别为谐振频率和温度的变化。GO SAW 湿度传感器的 TCF 为-0.12×10-6/℃。结果表明,ST-cut 石英衬底SAW 湿度传感器具有几乎为零的TCF,对温度极不敏感。与表1 中的其他SAW设备相比,本传感器的热稳定性具有显著优势。

表1 不同基底的声表面波传感器的TCF 比较
将RH 值从30%增加到93%,并重复进行3 次重复实验,进一步研究了GO SAW 湿度传感器的短期重复性。结果如图7 所示,对于连续3 次重复性实验,传感器频率偏移的波动小于5%,这表明GO SAW 湿度传感器具有良好的短期重复性。
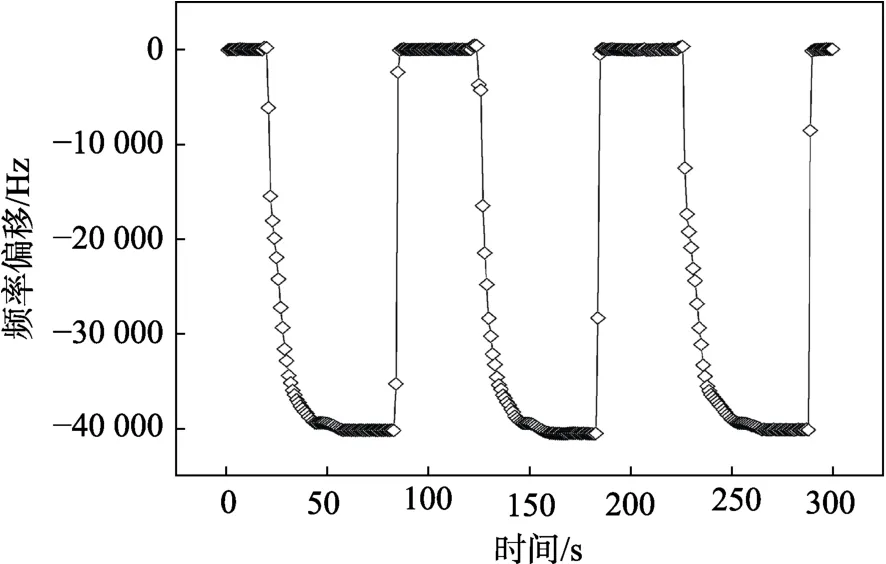
图7 GO SAW 湿度传感器的短期重复图
图8 为GO SAW 湿度传感器在32 d 的时间内测得的稳定性图,可知在低相对湿度下具有超强的稳定性,在高相对湿度下传感器中心频率波动小于 5%。这表明GO SAW 湿度传感器具有良好的长期稳定性。
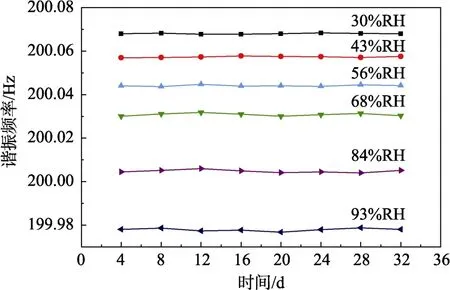
图8 GO SAW 湿度传感器的长期稳定图
3 结语
GO 膜细密的起伏褶皱结构和亲水性基团,为水分子提供了大量的吸附位点。本研究发现,当相对湿度从30% RH 增加到93% RH 时频移为40.2 kHz。利用TCF 几乎为零的ST-cut 石英作为压电基底,实现了传感器的良好热稳定性。基于 GO 传感膜的 SAW 湿度传感器具有快速的响应和良好的灵敏度,以及良好的短期重复性和长期稳定性。