固定场景下的无人驾驶技术应用
2020-09-29王鑫玥陈林黄祖朋陈婷林智桂
王鑫玥 陈林 黄祖朋 陈婷 林智桂
摘要:近年来,汽车智能化技术正逐步得到广泛应用。本文在详细分析固定场景道路环境特征、常用传感器特性的基础上完成无人驾驶车辆传感器选型及运行策略制定,实现了无人驾驶车的试运营,验证了技术方案的可行性。同时在此基础上进行了使用场景的优化,提出了新的路线规划策略并加入平台调度功能,完成了试运营。为固定场景无人驾驶应用提供了可实践的技术探索和应用示例。
关键词:无人驾驶;固定场景;运营体验
中图分类号:U467
文献标识码:A
0引言近年来,汽车智能化技术正逐步得到广泛应用,无人驾驶也成为了智能车的关键技术和研究方向。相比复杂的城市道路,低速且固定场景的无人驾驶无疑降低了对传感器及算法算法的要求,容错率更高,更利于快速落地。于是一些基于固定场景的无人驾驶方案应运而生并快速地投入了使用。本文主要介绍了在固定场景下,通过对区域内道路环境进行分析,确定传感器方案及车辆控制逻辑,实现低成本、高可靠度的无人驾驶能力。同时针对区域内环境及用户特性,优化了车辆行驶路线及其调度策略,实现无人驾驶车运营[1-2]。
1无人驾驶车辆系统搭建
主要对测试区域进行了场景特征分析,并在此基础上进行了传感器选型及部分控制策略制定。1.1固定场景分析
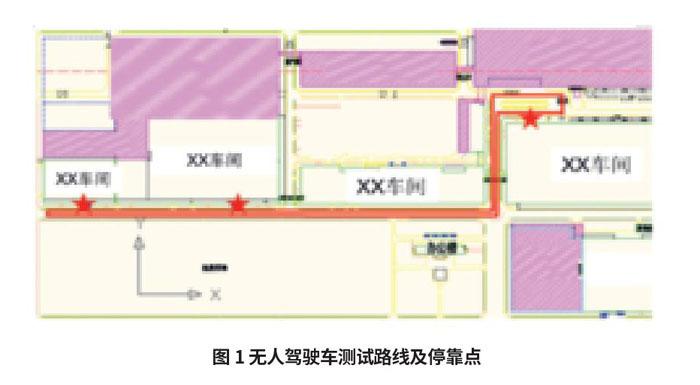
经过对测试区域内路况及车间分布的初步调查,选取如图1所示路线及停靠点。
(1)该路线上主要交通参与者如表1所示。(2)区域内道路限速25km/h,车道线清晰,无两轮车通行,行人车辆分离行驶。综上,该场景道路环境单一、结构清晰。
1.2传感器选型
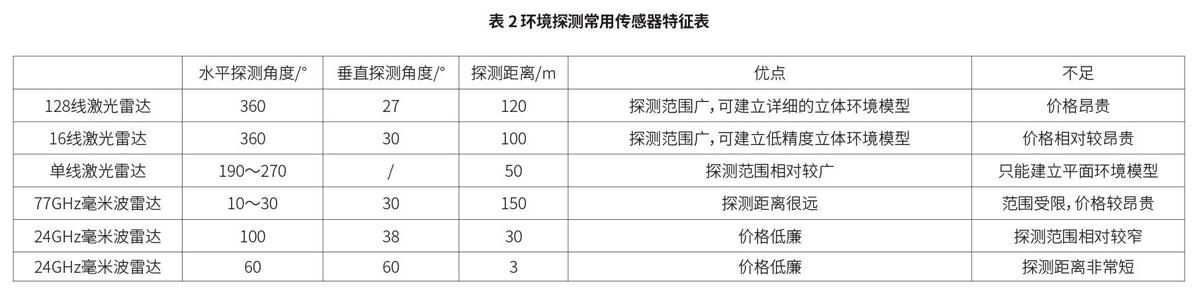
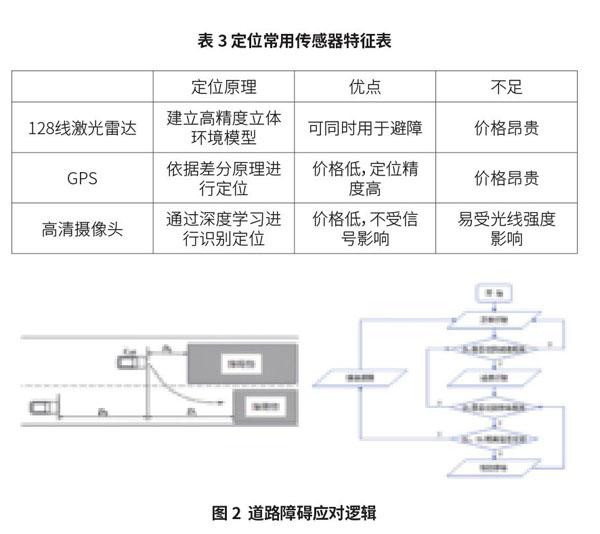
表2和表3分别给出了各类常用传感器用于环境探测及车辆定位的特征分析。本场景为低速环境,同时需要使车辆四周盲区尽可能小。故测试采用2个单线激光雷达及一套超声波雷达作为车辆障碍物探测方案。同时,综合考虑现场光照及建筑物遮挡情况,采用GPS为主、摄像头为辅的组合定位方案。
1.3控制策略
无人驾驶车在行驶过程中主要有加速、减速和换道3种行为模式。当车辆定位信号弱或行径路口、人行道时需减速行驶以确保安全,必要时需制动停车。当车辆遇到障碍物时,则按照图2所示策略进行处理。
2固定场景下无人驾驶车辆的运行
主要进行无人驾驶车试运营,并根据试运营结果进行数据分析,进而对无人驾驶车进行改进优化,包括制定新的运行路线及调度逻辑,而后再一次进行场景试运营[3]。
2.1一期运营测试及需求调查
第一期试运营累计运行2周,共完成98人次接驳、参与体验人数67人,总计运行里程103.9km。统计分析,近80%员工认为无人驾驶车有效地降低了其往返各车间耗费的时间,提高了效率。同时,79%的员工希望无人驾驶路線可以更多选择。
经过对体验人员反馈及需求进行分析后,在原测试路线基础上增加途经行政办公区域和新能源总装的路线及停靠点,如图3所示。
2.2二期摆渡车试运营
在一期运行结果及用户需求分析的基础上,二期更新路线及站点。更新路线后的摆渡车采用分段式路径规划方式,将路网根据各岔路口分成数个路段。当乘客确定目的地后,车辆会根据起点及终点的位置选择分段路线拼凑在一起,采取最短的路线作为最终行驶路径。相比初期方案,分段式路径规划可减少等待时间约20min,每趟行程耗时减少约5~10min。
同时,二期增加了车辆预约APP及运营平台。平台会收集用户手机APP发送的用车需求,进行一定的处理后将调度命令分别发到每台摆渡车上,摆渡车会根据收到的命令于相应时间完成摆渡任务并将结果实时上传至平台[4]。
基于平台调度的无人驾驶摆渡车调度逻辑如图4所示。
二期进行了2周试运营,共完成306次人员接驳、参与体验人员237人、总计运行里程723.7km。经统计显示,本次体验人员职位分布均匀,各区域对无人驾驶摆渡车均存在确切需求[5]。
3结束语
无人驾驶技术是未来汽车智能化发展的关键技术和研究方
向。本文通过对固定场景的道路环境及常用传感器的特性分析,完成了无人驾驶车辆的系统设计。
在此基础上,本文制定了无人驾驶车辆在固定场景下的运营路线和方式,对无人驾驶车辆系统构架进行了验证,并对固定场景下无人驾驶车辆运行的模式和技术方案进行优化,提出新的路线选择和调度策略。结果表明,本文所搭建的无人驾驶车辆在固定场景下具有良好的适用性,且具有如手机约车等多种扩展功能,为无人驾驶技术的发展与应用提供了具有实践意义的技术探索和应用示例。
【参考文献】
[1]逄伟.低速环境下的智能车无人驾驶技术研究[D].浙江大学,2015.
[2]杜永博.无人驾驶技术在低速环境下的智能车应用研究[J].技术与市场,2017(06):346.
[3]马飞跃,王晓年.无人驾驶汽车环境感知与导航定位技术应用综述[J].汽车电器,2015(02):1-5.
[4]潘建亮.无人驾驶汽车推广应用前期研究[J].汽车与配件,2014(32):33-35.
[5]马硕.无人驾驶汽车应用与发展现状分析[J].汽车与驾驶维修(维修版),2017(4):142-143.
作者简介:
王鑫玥,本科,工程师,研究方向为智能驾驶技术开发与应用。
