单脉冲目标识别数据处理技术
2020-09-29房崇鑫张正华
胡 振,房崇鑫 ,张正华
(1.中电科技扬州宝军电子有限公司,江苏 扬州 225003;2.扬州大学 信息工程学院,江苏 扬州 225127)
0 引言
单脉冲作为区别于常规雷达体制发展起来的先进技术 ,在现代航空领域得到广泛应用[1],但在目标识别系统中尚未采用该项技术。方位精度作为目标识别系统的重要技术指标,其精度对整个系统至关重要,为此,本文在目标识别系统中采用单脉冲技术,并通过采用OBA自动校准[2-3]、最小二乘法测角[4]和数字鉴相[5]等关键技术,大大降低了目标识别系统识别目标的方位误差,具有非常重要的现实意义。
1 单脉冲目标识别数据处理系统
单脉冲[6]目标识别数据处理系统的组成部分有CPU模块、智能并行接口模块、多协议智能通信串口模块和监控采集模块。其他外接设备(如键盘和显示器等)在维修调试时使用。其中,CPU模块集成显卡、网卡,并提供电子盘接口,电子盘中存储有应答处理、点迹/航迹[7]处理程序和监控处理程序,以及需要加载的初始数据。系统组成如图1所示。
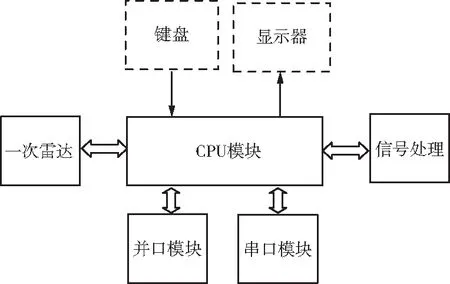
图1 单脉冲目标识别数据处理系统组成
数据处理与信号处理主要通过CPCI总线、网口通信实现,与一次雷达采用网口通信。
数据处理实现雷达工作参数的接收与加载、故障采集与故障信息诊断、目标点迹凝聚和航迹生成以及系统初始化设置(中断设置、任务优先权设置、硬件初始化设置)、输出目标报告、应答报告、接收雷达方位信号(方位信号来自一次雷达,信号形式为稳定坐标系下的绝对方位码,通过网口传送)等功能。数据处理执行程序固化在一个4 GB的电子盘中,处理器具备看门狗功能,实现系统故障后的自动恢复。根据每次询问的回答脉冲,经单脉冲天线Σ和Δ通道送Σ和Δ接收机,经接收机混频后,由信号处理单元进行处理。
单脉冲雷达目标的方位角通过当前天线方位加上偏离瞄准轴角[8],计算Σ和Δ幅度比SDR:
SDR=和log(∑)-差log(Δ)。
(1)
根据SDR值与偏离瞄准轴角偏值的对应关系以获得偏离瞄准轴角值,可通过对Σ和Δ的中频信号进行鉴相可以获取偏离瞄准轴角值的符号(天线轴向指示),再加上天线的指向角度可以得到目标的方位角度。
2 单脉冲目标识别数据处理软件组成及功能
数据处理软件组成如图2所示。

图2 数据处理软件组成
2.1 初始化模块
加电后,数据处理软件完成自动加载。实现参数文件的装订、硬件初始化和实时任务的创建。主要包括:串口、网络、中断和CPCI总线等硬件初始化、全局数据申请、工作任务创建及优先级分配和最新工作参数加载。
2.2 接收数据模块
在接收数据模块工作的每个周期内,信号处理分系统将形成的目标识别应答报告放在CPCI总线的I/O口上,然后以中断方式传递至数据处理分系统,后者做出应答接收并将进程送至I/O地址读取数据[9]。最终,信号处理分系统将形成目标识别的报文通过网口送至数据处理分系统。
2.3 目标识别处理模块
目标识别处理流程如图3所示。

图3 目标识别软件处理流程
2.3.1 点迹处理模块
点迹处理模块主要是对应答报告缓存区内的数据进行处理,其功能包括建立应答群的启动、确定距离方位、促进应答群凝聚、计算目标距离和方位以及剔除错误与虚假目标[11]等,实现网络和串口发送点迹数据的作用。
点迹处理的主要过程如下:
① 多余的应答(如多路径反射应答);
② 计算应答报告中目标的真实方位;
③ 应答群起始;
④ 点迹相关运算;
⑤ 应答群更新;
⑥ 一次碰撞处理;
⑦ 原始目标报告生成,通过接口送往航迹处理器。
点迹处理模块将波束驻留期内新接收的目标应答信号与以前重复周期内所接收的应答信号(群)进行比较,其中新的应答信号必须满足以下4个条件:应答信号和群之间的距离差不超过一个给定的阀值;应答信号和群之间的方位角差不超过一个给定的阀值;应答群不和应答信号当前重复周期内的另一个应答信号相关;应答信号和应答群模式相同。
如果应答信号和应答群相关,那么用新的应答信号中的信息去更新存在的和其相关的应答群的信息,否则这个新的应答信号作为一个变量,在以后的重复周期内做相关比较使用。对任何一个目标而言,当波束驻留期内所有的应答信号被处理,应答群可能宣告完成,而应答群最终完成生成目标报告。
2.3.2 航迹处理模块
航迹处理模块的主要功能为:接收点迹处理送来的原始目标报告、检测存在误差的目标报告并对其进行修正、航迹起始与航迹的相关检测(其中包含航迹的距离、方位、代码、高度和速度等)、航迹信息的更新和计算目标的速度与航向[11-12]。
航迹处理过程如下:
① 目标报告的整理;
② 码交换处理;
③ 目标高度计算;
④ 扇区计算、划分;
⑤ 航迹起始;
⑥ 距离、方位、代码、高度、速度检测;
⑦ 航迹信息更新;
⑧ 计算目标的航向、速度;
⑨ 存在误差的目标剔除(包含反射、非同步干扰、分裂目标和环绕目标等);
⑩ 删除过期航迹。
2.4 BIT处理模块
BIT处理模块主要负责实时监测系统的供电、通信等工作状态是否正常,并上报给显控。一旦出现工作异常,可准确进行故障定位。
2.5 公共模块
公共模块是系统的外围通信接口,包括网络通信接口和串口通信接口。目标识别系统可通过公共模块与外围设备(上位机、雷达等)进行数据通信。
3 关键技术及测量精度分析与验证
3.1 OBA表自动校准
采用和差单脉冲测角方法,每个应答脉冲都带有测角的幅相信息,且接收信号信噪比高,所以测角精度高。角敏函数(OBA)表的正确性严重影响单脉冲测角精度。因雷达阵地电磁环境、天馈系统性能与内场测试状况差异,内场标定的OBA表无法准确符合实际情况。可通过自动校准技术获得高精度OBA表数据,提高单脉冲测角精度[13-14]。
通过以下方法对OBA表进行校准:架设固定应答模拟器,统计该应答模拟器信号在不同频率点和在不同偏轴角下的SDR值,并对统计值求平均,然后采用高阶曲线对平均值进行拟合,得到实际的OBA曲线。再对该曲线进行离散化,生成不同SDR值与目标偏轴角对应[14]。
实际中,天线波束不完全对称,且回波的SDR值集中在某区间段。因此对左、右半波束的OBA表分别进行校准,并合理判断应答回波的SDR值[14]。校准后结果如图4所示。
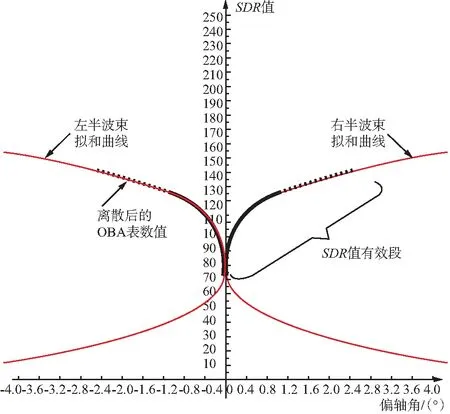
图4 OBA表自动校准后结果
3.2 最小二乘法测角
当目标距离远、信噪比低、目标过顶或者雷达接收通道幅相发生漂移时,单脉冲比幅测角性能会严重恶化。在这些情况下,为了保证测角精度,通常采用最大幅度测角法和进出波束测角法进行替代。最大幅度测角法是将目标回波幅度最大时的波束指向确定为目标方位。进出波束测角法是将目标进出波束角度的均值作为目标方位。上述方法容易工程实现,但存在Δθ=ω/f的量化误差(ω为天线旋转角速度;f为雷达脉冲重复频率)。通过分析数据得知,一些目标回波幅度最大值附近比较平坦且存在随机起伏,一些目标回波形状并不完全对称,都会影响测角精度[14]。
本文采用最小二乘法测角替代单脉冲比幅测角的方法。实现过程采用式(2)的多项式逼近一组雷达测量值(θi,Ai):
(2)
式中,θi为天线方位指向角;Ai为和通道信号幅度值。
选取适当的系数aj,使式(3)的值最小,得到该组测量值的最小二乘拟和曲线:
(3)
对式(3)求导,得:
(4)
取极值点时刻对应的角度作为目标方位角。最小二乘法测角如图5所示。
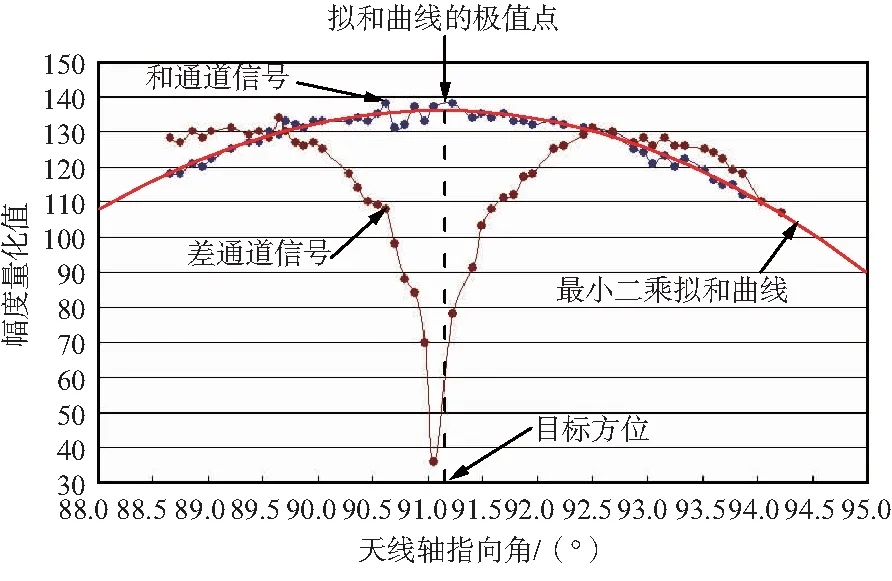
图5 最小二乘法测角
最小二乘法测角不需要OBA表,也不存在上述2种方法的量化误差。对于回波幅度起伏以及波形不对称的情况均能获得较好的测角精度。通过对和差幅度的比较,确定识别目标方位精度[14]。
数据处理分系统要完成点迹/航迹处理任务。具体方法是从应答报告中计算出目标的距离和方位,对应答码进行解码,对干扰进行滤波,充分利用脉冲幅度信息、应答间相关信息、扫描间相关等信息。数据处理分系统选用的计算机功能强大,可将全机的工作状态和故障监测、设置控制等任务集成,分别采用独立的程序模块实现。
3.3 数字鉴相技术
数字鉴相技术主要应用在信号处理模块。信号处理根据和差零中频信号进行相位计算,确定在扫描识别目标时天线轴向在识别目标的左边或右边。数据处理根据和信号幅度和轴向可以初步确定目标的方位。
3.4 测量精度分析及验证情况
目标识别系统测量方位角度测量误差主要由应答模拟器频率漂移、接收系统热噪声以及A/D量化误差三方面因素决定。经过计算,上述误差因素引起的误差合计为0.06°(均方值)[14]。
2016年以来,经过多次检飞验证,该方案可实现测量精度达到0.06°(均方值,天线8 m)。
4 结束语
针对传统目标识别系统测量目标方位角度误差大的问题,在目标识别系统中引进单脉冲测角技术,经过理论计算与方案论证,最终通过硬件实现以及检飞验证,达到预期效果。系统在多目标测量、人机界面、可靠性方面仍有不足,如何通过优化算法提高对多目标方位测量的实时性并进一步提高测量精度是下一步研究的重点。
