自由设站坐标法在厂房立柱吊装测量中的应用
2020-09-28李江侠张志敏
李江侠,张志敏
(1.广东人防工程质量检测有限公司,广东 广州 510500;2.广州市市政职业学校,广东 广州 510650)
1 问题的提出
在工厂的施工测量中,经常遇到吊装立柱的测量工作。以往都是用一台经纬仪或者全站仪摆在立柱纵轴线侧面(尽量靠近立柱柱面),另一台经纬仪或全站仪摆在立柱横轴线附近,用2台经纬仪或全站仪指挥立柱的吊装。但是这种方法不仅操作复杂,精度也难以保证。全站仪最主要的功能是可以在控制点上直接测量未知点的坐标,同时大部分全站仪都有坐标放样的功能。如何利用全站仪的这些功能来进行立柱吊装时的测量工作,目前鲜少有专门的讨论。基于此,本文利用全站仪的坐标测量功能对立柱吊装的测量方法进行分析。在工程测量中,一般都是使用2″级全站仪甚至是使用1″级全站仪进行测量放线,本文对使用2″级全站仪进行测量放样进行讨论。
2 控制点测量方法
常见的工业厂房立柱安装测量如图1所示。沿主轴中线两侧S轴线每隔距离L设置一根立柱,该立柱是厂房上部承重和安置行车的基础,都是事先预制好再运到现场安装的,安装前其基座也已经现场浇筑完毕。立柱的安装不但对立柱的中心位置有较高的精度要求,还对立柱的导轨底座高程和立面旋转以及倾斜有严格的要求。因此,在施工放线时必须兼顾这四方面的要求,同时方法还要简单、快捷。否则,将影响立柱安装的进度。
2.1 控制测量外业
图1中,A、B是厂房主轴控制点,是厂房整个施工期间各项测量工作的基础。C、D、E、F是辅助控制点,主要用于基础开挖和浇筑时的测量定位。立柱安装期间,各种材料和设备堆放在厂区,整个厂区十分杂乱,很难做到对主轴控制点或辅助控制点间的直接通视。为此,可以在可同时与主轴控制点通视的,且与立柱安装位置距离适当的周围视线开阔的位置设立临时控制点。
设临时控制点点号为P,与主控制点A、B通视。在P点设站,选择后视边长较长的控制点(A)作为后视点。设置距离测量为4次测量的平均值,独立4次测量A、B两点的假定坐标,取平均值作为最终结果。
2.2 内业计算
在由A、B、P三点组成的三角形中,利用两点距离公式求出各边边长,然后求出A角。求出A点到B点在两个坐标系中的方位角,计算方位角之差和距离之差。由于测量误差的存在,距离之差的大小就反映了实际误差的大小。为了获得较高的精度,必须进行平差。平差的方法就是利用距离之差求出假定坐标三角形的缩放比例系数(接近于1),求出各边的平差后边长,最后求出P点的平差后坐标。
由A、B两点在两个坐标系的高程求出高差闭合差,再由P点到A、B的距离可以很容易求出P点的平差后高程。
2.3 精度分析
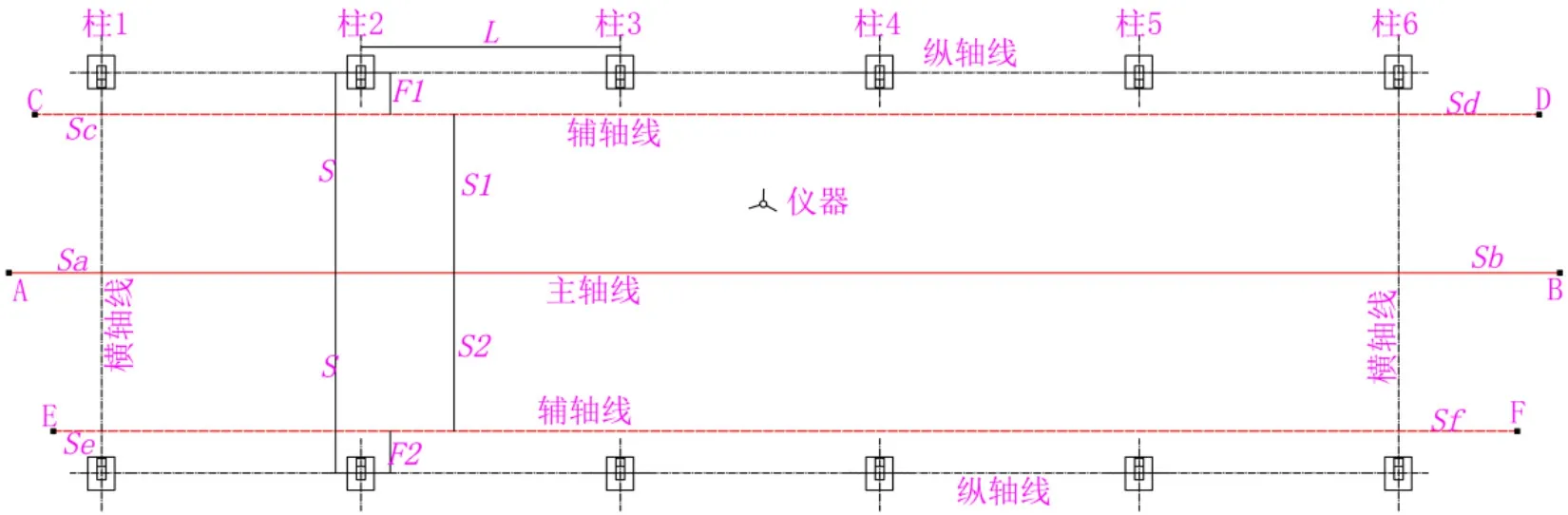
图1 立柱安装测量示意图
由于厂房的长度一般不会超过100m,因而取最大视线长度100m进行精度分析。一般的2″级全站仪一个测回方向值中误差为2″、测距中误差2mm+2D10-6。而全站仪测量坐标实际上是角度测量半个测回、距离测量一个测回的坐标。因此,角度测量误差对点位误差的影响为Mβd=±2D×Mβ÷206265=±1.4mm;距离测量误差对点位误差的影响为Msd=±2+2D10-6=2.2mm;单次测量前视点的点位误差为。4次测量结果的平均值的点位误差为。
3 立柱的吊装测量
3.1 测量点的布设
测量点的布设对立柱放样测量具有重要作用,立柱放样测量示意图如图2所示。在图2中左边一组(3个视图)视图是以A、B两控制点为分界线、由A向B方向左侧的视图,另一组视图则是由A向B方向右侧的视图。从图中可以看出:每个立柱需要布设4个观测点(10mm×10mm反光片),L1、L2(R1、R2)设置在立柱正面中心线上,反光片的中心线与立柱的中心线重合;L1(R1)的反光片下边缘距柱杯口线向上0.5m的位置,L2(R2)的反光片上边缘尽量靠近行车支架的底座;L3(R3)设置在立柱侧面面向仪器一侧,反光片的上边缘与行车底座顶面平齐,L4(R4)设在立柱的侧后面,高度与行车底座顶面大致同高。

图2 立柱放样测量示意图
3.2 基本原理
(1)在工程控制网中,一般都是把主轴线作为坐标Y轴,垂直主轴线的轴作为X轴建立坐标系,为了避免出现负坐标,把坐标原点适当平移,如图2所示。立柱放样测量时利用已知点A、B和求解的测站P点的坐标高程(实质是工程坐标),用全站仪直接测量各点的坐标。L1(R1)、L2(R2)的坐标确定了立柱正面中心线的坐标位置和立柱的倾斜度,L3(R3)与L4(R4)确定了立柱的旋转程度。L1(R1)与L2(R2)的X坐标差代表立柱正面的倾斜程度,L1(R1)与L2(R2)的Y坐标差代表立柱侧面的倾斜程度。设ix为立柱正面倾斜率,iy为立柱侧面倾斜率,则立柱倾斜及倾斜率计算详情如表1所示。
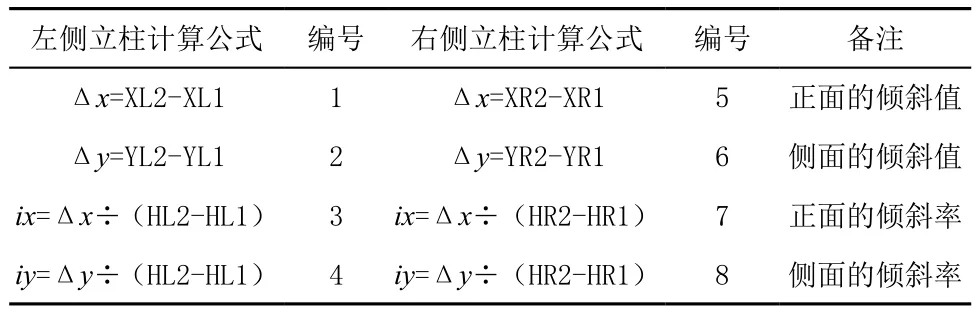
表1 倾斜及倾斜率计算表
(2)L3(R3)与L4(R4)的Y坐标差与X坐标差之比反映了立柱的旋转角度,即r=180(YL4-YL3)÷(XL4-XL3)÷π或r=180(YR4-YR3)÷(XR4-XR3)÷π。其中r为立柱的旋转角度。由于立柱的尺寸是固定的,故L3(R3)到L4(R4)的水平距离也是相对固定的。因此,可以把立柱的旋转简化为用L3(R3)与L4(R4)的Y坐标差来表示立柱的旋转。即Δr=YL4-YL3或Δr=YR4-YR3。其中Δr为立柱旋转Y坐标差。这样就可以在测得L3(R3)与L4(R4)的坐标的时候立即知道立柱有没有旋转及旋转的量。
(3)测得立柱L1、L2、L3、L4或R1、R2、R3、R4的坐标后,计算相应的检核项数据。当计算结果小于限差要求时,说明立柱吊装正确。否则,就要进行相应调整,直到合乎要求。
4 结束语
在工业厂房立柱的吊装测量中,完全可以用全站仪直接测量立柱特定点(这里合理布设观测点很重要)的坐标高程,通过所测得的坐标高程来判定立柱的位置是否正确,是否发生旋转,是否发生倾斜。对比用2台经纬仪来进行立柱吊装测量效率更高,精度更可靠,对工业厂房立柱吊装测量具有指导意义。
