医院智能配送机器人控制系统设计
2020-09-26王淼赖志林李睿李良源陈会斌
王淼 赖志林 李睿 李良源 陈会斌

摘要:根据国务院办公厅发布的《深化医药卫生体制改革2019年重点工作任务》中关于“互联网+医疗健康”的指导精神,从自动化物流运输方面入手,构建医院智慧物流控制体系。首先对医院智慧物流的必要性、功能設计、性能设计进行了阐述,随后详细介绍了该系统的主要功能模块与硬件结构,同时对系统软件控制策略与流程进行详细的分析与设计,并以广东省一家三甲医院为例,介绍了医院智能配送机器人在实际运行中取得的良好效果。该智能控制系统对实现医院智慧物流具有重要的实际意义。
关键词:机器人;配送;控制系统;物流;智慧医院;人工智能
0 引言
随着医院信息化管理的不断深入以及医疗设备智能化技术的不断发展,人们对大型综合医院的物流系统提出了新的要求。目前,传统医院物资采用人工配送方式,占用医护人员大量的时间与精力,配送效率低、成本高、不可追溯且流程不可控,人员流与物资流使用相同通道,增加了交叉感染的风险。因此,拥有一套以智能配送机器人为核心的自动化物流运输系统已成为医院智能化升级的必要因素,更是现代化医院的标志之一[1]。
1 设计要求
1.1 系统功能设计要求
医院智能配送机器人控制系统需要满足医院内各种复杂环境的要求,实现各个科室物资的大范围、跨楼层的运输,故智能配送机器人应具备定位导航、自主避障、自动配送、自动续航、智能交互、智能调度等功能。
1.2 系统性能设计要求
(1)定位性能:误差在10 mm;(2)转向性能:误差在0.5°以内;(3)安全性:系统最主要的就是安全,包括数据安全以及设备自身的安全防护;(4)可靠性:系统可靠性是系统长期稳定运行的基石,只有可靠的系统才能发挥有效的作用[2];(5)可拓展性:系统可无缝对接多种接口,如SPD、HERP、HIS等。
2 系统总体设计
医院智能配送机器人控制系统包含7大模块,各个模块功能如下:
(1)电源模块:其是整个系统动力的来源,为各个模块提供能量[3]。在设计过程中,由于各个模块对电源电压的要求不一致,因此需将电源分为不同的等级对系统供电,从而满足不同模块的需求。
(2)主控模块:其是控制系统的“大脑”,是控制系统最为核心的部分,主要对各个模块起到协调作用[4]。主控模块可接收各个模块反馈的信息并进行综合、运算、分析、处理,再用于对相关模块的控制。
(3)运动控制模块:MCU发送控制指令,机器人在接收目的指令后运动到指定位置,其中需要进行直线行走、转弯等。在机器人运动过程结合智能算法,对电机进行速度和方向等控制,以提高机器人运动的稳定性与精确性。
(4)避障模块:机器人行进过程中用于检测障碍物,防止碰撞损坏机器人。本文设计的机器人增加了超声传感器实时获取障碍物的位置,遇到障碍物后做出相应规避动作,进入停止等待状态。
(5)导航及定位模块:机器人在配送环境中用于导航与定位。其控制系统通过激光雷达获得自身在环境中的位置信息,为机器人配送提供保障。
(6)无线通信模块:其是机器人与后台调度管理中心连接的纽带,用于数据的传输,接收后台调度管理中心的任务指令以及反馈机器人位置、状态、电量、工作情况等信息。
(7)人机交互模块:其主要功能是实现可视化操作,提高配送机器人的操作简便性,便于操作人员随时观测机器人的运行状态;通过该模块可以方便、快捷地对机器人的参数进行修改、设定,以保证在不同工况下实现机器人配送作业最优化。
3 硬件设计
智能配送机器人总体结构如图1所示。
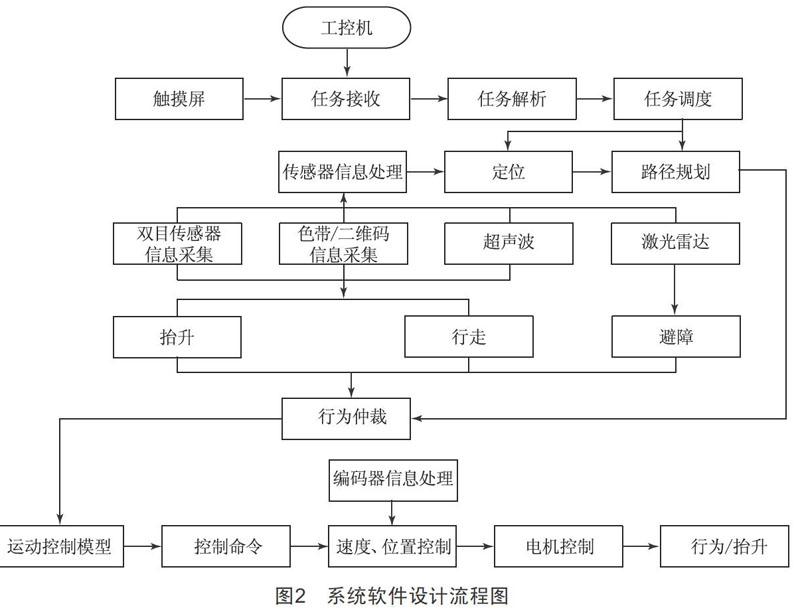
4 软件设计
系统软件设计流程如图2所示。具体步骤为:由后台调度系统或触摸屏给机器人下发任务,机器人接收、解析任务后,通过激光雷达、双目传感器、二维码扫描器、超声波等传感器信息处理与数据融合,以及对运动控制模型的分析、编码器信息处理和电机速度与位置的闭环控制,实现机器人的配送功能。
系统软件采用模块化程序结构,将整个嵌入式软件系统分为初始化模块、中断模块、数据采集模块、运动控制模块、无线通信模块。其中,初始化模块主要包含对系统时钟的初始化、I/O端口功能的初始化、系统定时器的初始化、串口通信的初始化、AD数模转换的初始化。中断模块主要进行标志位的设置,保证程序时序逻辑正常。数据采集模块主要采集和处理各个传感器中的数据,包含编码器脉冲数据的反馈与处理,可获取机器人行驶速度信息;采集二维码坐标信息,可获取机器人当前位置信息;采集电池电压信息,可获取机器人当前电量信息。运动控制模块主要实现配送机器人行驶和背负重物两种功能的控制,包括对驱动电机的速度控制和方向控制以及对电动杆的速度控制和位置控制。
5 应用分析
以广东省一家三甲医院为例,智能配送机器人主要服务于中心药房和消毒供应中心,其可自主避障、自主充电、自动呼梯和乘梯、自动开关门,最终实现跨楼层运输任务。该机器人单次最大运输量可达300 kg,全天候24 h待命,平均每台机器人的配送能力相当于3~5人。该医院在引入智能配送机器人代替传统人工进行配送后,一方面大大提升了医院物流的运输效率,另一方面释放了医护人员宝贵的工作时间,提高了整院医疗服务质量。
6 结语
医院智能配送机器人不仅解决了医院现阶段人工配送存在的痛点问题,更是通过智能配送机器人系统的引入,实现了传统医院模式与新兴先进技术的交叉融合,不仅在行业内起到了示范作用,更为以后搭建智慧物流系统甚至是建设智慧医院提供了新的思路与途径,推动了医疗场景物流智能化及智慧医院建设的进一步发展。
[参考文献]
[1] 夏琴晔,杨宜民.基于biSCAN和SVM的机器人目标识别新算法研究[J].广东工业大学学报,2013,30(4):65-69.
[2] 肖强.地面无人车辆越野环境多要素合成可通行区域检测[D].北京:北京理工大学,2015.
[3] 孙银健.基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D].北京:北京理工大学,2015.
[4] 仵桂学,杨宜民,黄东运,等.基于机器视觉的快速切割路径生成系统[J].自动化与信息工程,2015(3):12-15.
收稿日期:2020-07-27
作者简介:王淼(1989—),男,湖南人,工程硕士,助理工程师,研究方向:智能控制科学与技术(机器视觉、传感器信息融合)。
