图像特征匹配环境下SIFT算法的改进
2020-09-24程俊廷张俊峰
程俊廷, 张俊峰, 胡 瑾
(1.黑龙江科技大学 机械工程学院, 哈尔滨 150022; 2.合肥财经职业技术学院 人工智能学院, 合肥 230000)
0 引 言
在建筑物三维重建的过程中,对采集的图像进行特征匹配,是至关重要的一个环节[1]。图像特征匹配既可以利用相对较少的图像比如两幅,也可以用更多的图像,比如三幅乃至更多,通过特定算法,对图像内容、关系、结构等进行相似性和一致性分析,从而识别出同名点的过程。特征点的匹配分为三个步骤:第一步为特征提取,第二步为特征描述,最后一步为特征匹配。特征提取就是从给定的图像中提取出关键点(或角点、特征点)等[2]。特征描述就是利用数学向量对提取到的关键点进行一系列的描述,其目的是为了保证向量和特征点之间一一对应的关系。特征匹配实际上就是计算特征向量之间二者的距离,最常用的是计算欧式距离。在进行图像特征匹配时,有Susan算法[3]、Moravec算法[4]、Forstner算法[5]等,但使用最广泛的算法是David.Lowe教授提出的尺度不变特征SIFT算法[6-7],此算法具有相对较强的鲁棒性,当图像进行尺度大小缩放、多角度旋转、亮度变化时能够保持不变性[8]。SIFT算法在具备以上诸多优点之外,也存在容易对出现多个相似特征点共存时,出现误匹配的状况和计算复杂繁琐的缺点[9]。为了改善这些缺点,提出一种改进的SIFT算法,一方面通过降低描述子向量维度,降低计算量和复杂度;另一方面通过考虑匹配点的最近邻欧式距离,剔除误匹配点,提高特征点匹配准确度。
1 改进的SIFT算法
1.1 SIFT算法
目前,在建筑物三维重建过程中,图像特征匹配的主流算法是SIFT算法,SIFT算法实现图像特征匹配包括构建尺度空间、高斯差分、生成特征描述和特征向量匹配。
1.1.1 构建尺度空间
特征点检测是在尺度空间中完成的,从较远的地方采集建筑物的图像,尺度空间越大,图像越模糊,大尺度空间能还原建筑物表面的概貌,小的尺度空间能够还原建筑物表面的细节特征[10]。为了更详细的表示尺度空间,可以采用将图像的卷积和高斯函数二者结合进行表示
L(x,y,σ)=G(x,y,σ)I(x,y),
(1)
式中:L(x,y,σ)——图像的尺度空间;
G(x,y,σ)——尺度空间大小可以变得函数;
σ——尺度;
I(x,y)——原始图像的尺度坐标。
1.1.2 高斯差分
为了能够提高提取尺度空间极值点的稳定性,文中采用高斯差分尺度空间(DoG)来检测部分区域的极值点。高斯差分函数为
D(x,y,σ)=(G(x,y,kσ)-G(x,y,σ))I(x,y)=
L(x,y,kσ)-L(x,y,σ),
(2)
式中,k——放大因子。
1.1.3 特征描述子
为了保证图像在旋转时,描述子不变,首先需要定出方向参数。高斯差分尺度空间中检测出来的特征点梯度的数值以及方向计算为
m(x,y)=(L(x+1,y)-L(x-1,y))2+
(3)
(4)
特征点存在的尺度用L表示。目前,使用的SIFT算法,普遍选择以关键点为中心其邻域内16×16的窗口,在这基础上,进一步将窗口进行划分,变为16个4×4的子窗口,每个子窗口又含有8个方向的向量信息,故最终特征描述子有4×4×8共128维向量。
1.1.4 特征向量匹配
欧式距离是图像特征匹配的一个重要参数,当欧式距离小于特定阈值时,即认为匹配成功。欧式距离作为判定特征点相似度的一个重要依据,也有其局限性,当亮度发生变化时,会对欧式距离的结果造成偏差,导致匹配的准确度不高,往往结合特征向量的次近邻距离大小,来判定特征向量的相似度,整个匹配过程的公式为
(5)

(6)
式中:dab——两特征点之间的欧式距离;
da(j)、db(j)——特征点的描述符分量;
dN——两点之间的最近邻距离;
dS——两点间的次近邻距离;
t——阈值。
在欧式距离小于给定阈值的基础上,如果dN/dS也小于给定的某个阈值t,即可认定点匹配正确。
1.2 改进的SIFT算法
为了简化计算,提高匹配的准确度,在进行特征匹配时,采用一种改进的SIFT算法。
1.2.1 描述子
描述子是用特征点周围16×16的邻域当作采样窗口,在此基础上,需要进一步划分种子区域,传统的SIFT算法种子区域有16个,每个区域内含有16个像素。文中采用的改进SIFT算法,降低描述子的采样窗口,将特征点周围15×15的像素当作采样窗口,再将窗口划分为3×3的种子区域,每个种子区域有5×5的25个像素点。
与传统的SIFT算法相比,改进的SIFT算法描述子有3×3×8的72维向量,向量维度下降率为43.75%,向量维度的降低,可以大大减小计算量和计算过程中的复杂度,改善时间性能。
1.2.2 匹配算子
传统的SIFT算法中,忽视了匹配点对的最近邻欧式距离与点对匹配正确率之间的关系。在研究了大量点对的匹配结果后,发现特征匹配正确率与dab、dN以及dN/dS有如下规律:
(1)增大图像视角,会降低特征匹配的正确率。
(2)在采集图像时,如果角度没有变化,当dab>0.4时,匹配点对的正确率几乎为0;当dab<0.4时,匹配正确率显著提升,且dab越小,匹配正确率越高。
(3)特征点匹配的准确率与dN/dS有一定的关系,即二者比值小于0.5时,匹配的准确率高;当比值大于0.5时,匹配准确率低。
结合上述三点规律,文中将dab,dN和dN/dS结合起来,作为特征点匹配准确率的依据。
在初始计算时,如果dN≥0.4,则直接舍弃该点。
若dN<0.4,开始计算dN/dS的值,并根据所得值进行讨论。若dN/dS≤0.5,则认为特征点匹配的准确率较高,将此类点归为集合A中,定义为A类点集;如果计算的比值大于0.5且小于0.8,则认为特征点匹配的准确率较低,将此类点集归为集合B中,定义为B类集合;若dN/dS≥0.8,则认为匹配错误,直接舍弃。
具体的匹配流程如图1所示。
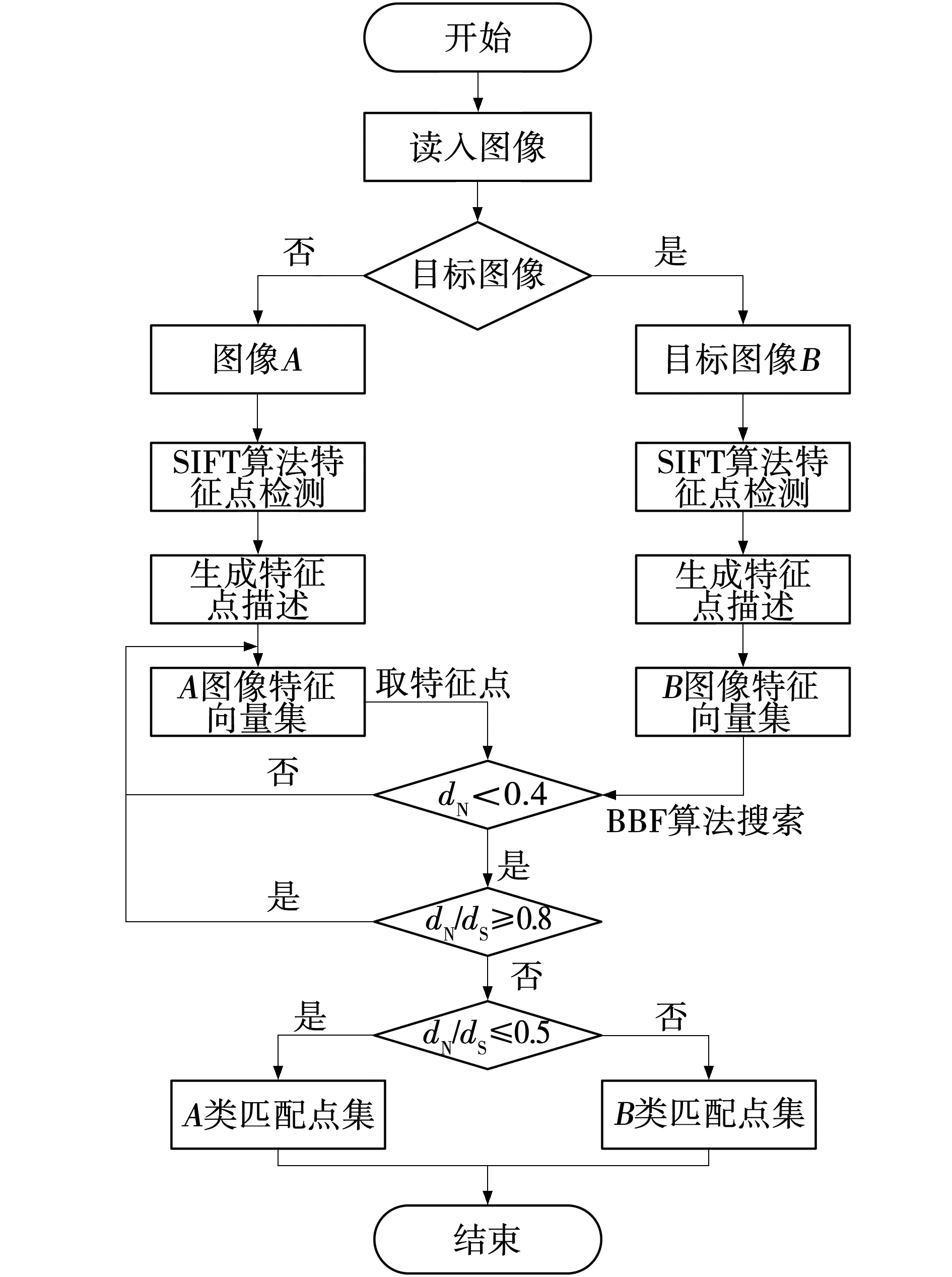
图1 初始匹配流程Fig. 1 Initial matching flow
2 实验对比分析
采用VS2018和OPENMVG搭建实验平台,配准SIFT算法与改进的SIFT算法的图像实验数据图如图2所示。采用传统的SIFT算法和文中的算法得出的结果如图3所示。

图2 实验数据Fig. 2 Experimental data graph

图3 匹配结果Fig. 3 Matching results
对两种算法的执行速度和匹配结束的效果进行对比分析,如表1和表2所示,其中初始匹配点数为n,特征点提取时间为t,初始匹配点对为m,初始匹配时间为t0,正确匹配点对为mt,误匹配点对为mf,误匹配率为e。
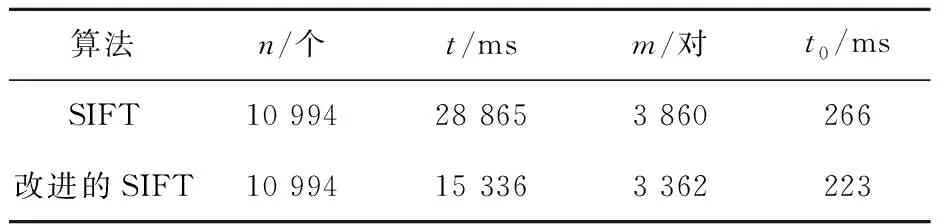
表1 两种算法相关运行时间对比Table 1 Comparison of relative running time of two algorithms
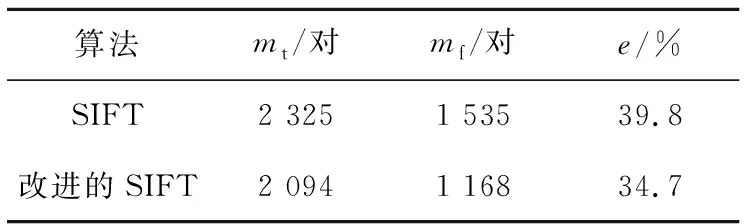
表2 两种算法匹配准确率对比Table 2 Comparison of matching accuracy of two algorithms
由表1可知,采用改进的SIFT算法,进行特征点提取时,所用的时间降低了46.87%,同时,初始匹配时间也降低了16.17%。节省了大量的时间,提高了匹配的效率,故改进的SIFT算法在时间性能上优于传统的SIFT算法。
由表2可知,采用传统的SIFT算法和本文改进的SIFT算法,从表2数据分析可得,采用改进的SIFT算法进行特征匹配,误匹配率减少了5.1%,匹配准确度更高。因此,改进的SIFT算法在匹配准确度上也优于传统的SIFT算法。
3 结束语
在原SIFT算法的基础上,给出了一种改进的SIFT算法进行图像特征点匹配。该算法通过减少SIFT算法描述子向量维度与改进SIFT算法匹配算子,来降低匹配过程所用的时间和提高特征匹配的准确率。通过对改进的SIFT算法和原SIFT算法的匹配结果进行分析,得出改进的算法提取特征点时,用时降低了46.87%,特征点匹配时,用时降低了16.17%,误匹配率降低了5.1%。因此,该算法在图像的特征匹配过程中具有广泛的应用价值。
