空间密集群目标关联与跟踪算法研究*
2020-09-23修建娟韩蕾蕾李启飞
修建娟,韩蕾蕾,董 凯,李启飞
(海军航空大学信息融合研究所,山东 烟台 264001)
0 引言
弹道导弹等空间武器具有射程远、精度高、突防能力强、杀伤威力大、效费比高等优点,成为现代战争中威慑力巨大的作战武器[1]。为了提高突防能力,空间目标在飞行中段过程中会采取多种突防措施,比如释放干扰诱饵和模拟真弹头的假目标,以及将末级火箭炸成碎片形成干扰碎片云等[2]。由于该阶段缺乏空气阻力,在重力加速度及惯性作用下,弹头、诱饵、整流罩、母舱和碎片残骸等均在弹道附近伴随弹头高速运动,各目标空间分布十分密集,运动状态十分相似,形成空间群目标环境。在这种密集群目标环境中,目标间会相互遮挡,加上电磁干扰、隐身等高新技术的运用,极易造成航迹断续,难以稳定维持航迹;目标进行航迹关联时,当前时刻每一个目标几乎都可以与下一时刻所有目标关联上,这会导致出现大量的关联错误[3];而且空间密集目标的多数量性也会极大地增加传感器负担,甚至超出传感器的最大跟踪能力。因此,如何维持对空间高速密集群目标的稳定跟踪,保证跟踪的精确度与实时性,是目标跟踪和相关领域需要解决的技术难题[4]。
目前,针对飞机编队或者舰船编队等群目标的关联跟踪算法在国内外有很多研究[5-8],但是空间目标的高速性与密集性使得空间背景下算法研究更加困难,专门针对空间高速密集群目标跟踪的资料相对较少[9-11]。文献[9]在贝叶斯框架下建立空间群目标的中心和观测量之间的相互作用约束模型,可提升在漏警概率较高情况下的目标数目估计的稳健性,但是其研究背景中目标数量较少,且目标间波门并不交叉,并不符合空间密集群目标的背景设定。文献[10-11]中的多假设空间群目标跟踪方法可处理复杂数据关联问题并提高跟踪稳定性,但是多假设算法很难快速找出合适的假设,而且容易导致计算量大,实时处理能力不强。
针对航迹断续问题,文献[12-14]都针对目标航迹采取关联方法提高航迹关联的正确率,但是其预测航迹的数据均来自中断前航迹的滤波外推预测,有一定的推算误差,由于文献中主要是针对海面舰船等低速目标背景,滤波外推预测得到的数据基本上能满足误差精度要求。空间目标运动速度非常快,在较短的中断测量时间内运动距离可达很远,这就对预测精度提出了很高的要求。从直观上看空间目标运动轨迹为椭圆轨迹,而滤波外推是近直线外推,利用滤波外推得到的数据明显具有较大的误差,过大的误差会对新旧航迹的融合造成干扰。
考虑到空间密集群目标运动速度特性对算法实时处理能力的要求,文中提出基于全局最近邻的关联与跟踪算法。通过分群处理将空间密集群目标跟踪问题转化为多目标跟踪问题[15],基于“全局最优”原则进行群航迹和等效量测间最短距离选择,优先完成该距离所对应群航迹的滤波更新,从而避免关联冲突,有效解决了传统最近邻域法[16-17]中“先占先得”原则带来的关联错误,并采用航迹预测与预报相结合的方法解决航迹断续与融合问题。最后通过仿真实验对文中算法的有效性进行了验证。
1 群目标分割算法
空间群目标在大气层外飞行时仅受重力加速度作用,目标长时间处于密集状态,要想以有限的传感器资源持续获取空域中所有目标的信息,必须对密集群目标进行群分割[18-20],对分割后的子群进行跟踪。
1.1 群的分割
1.1.1 群的预分割


1.1.2 组的合并
若两个量测组中有重复元素,则进行合并运算得到一个群,各群之间继续执行合并运算,直到所有群之间没有重复元素为止,至此得到n 个群U1,U2,…,Un。
1.1.3 单目标群
在完成上述步骤后,若判断量测集Z(k)中还有剩余量测并不属于划分的任何一个目标群,则该量测单独分为一个群,得到单目标群Un+1,Un+2,…,Um。
至此量测集Z(k)最终分割为m 个群,记为{U1,U2,…,Um}。
1.2 群中心数据的获取

2 全局最近邻关联跟踪算法
如果分群后各个目标群之间距离远远超过群中各成员之间距离,此时各目标群的相关波门将不相交,多群目标数据互联问题就可简化为多个单目标数据互联问题。但是空间密集目标分群后,有的群间距依旧比较近,会导致有量测落入多个群目标相关波门的相交区域内,此时的数据互联问题就要复杂得多。文中在最近邻算法基础上对数据关联情况进行充分考虑,提出了全局最近邻的数据关联跟踪算法,算法既可解决关联错误问题,也具有逻辑简单、计算量小的优点。
2.1 问题描述

若D≤γ,则判断该量测值落入被跟踪目标的相关波门内。若有多个量测落在相关波门内,则取统计距离最小的候选量测作为目标量测,其数据用于对目标状态进行更新。
最近邻域法中,当两个群目标选出的关联数据有冲突时,算法采用“先占先得”方法,即随机选取一个群目标作为当前群,选取与当前群最近的量测进行门限判断,若关联上则群航迹更新,后面的群目标在剩下的量测中选择最近的关联,以此来避免关联重复。但是该量测距离后续目标群的距离可能小于距离当前目标群的距离,当前航迹关联上的数据就有可能是属于后续群目标的正确量测,这样容易出现误跟和丢失目标的现象。
为解决关联冲突与关联错误问题,文中算法采用“全局最优”的数据关联原则。如果k+1 时刻的群中心量测数据全部落在某个群目标的波门外,则该群目标k+1 时刻测量数据漏检,否则,取距离最近者作为该群预关联对象。判断各群选出的预关联数据是否有重复,如果不重复,则各群关联正确,各群可选择预关联数据继续执行后续滤波更新过程,否则,将对发生冲突的关联群与其量测的距离再次进行大小比较,选取距离最近的群目标和测量数据进行最终的关联,通过该双向判断确保关联上的全局最优性。为了简化算法,可遍历求出所有群目标与所有量测之间的距离,选取其中最近的一组优先进行关联判断。因该距离是双向互选原则下的最近距离,则对应量测和对应群目标之间是全局最近邻,若该量测并没有落入该群目标波门内,则其他量测也断然在该群目标量测范围之外,同理该量测也不会落入其他群目标波门内。
2.2 算法步骤
基于全局最近邻的群目标关联跟踪算法主要包括如下步骤:
第1 步:根据3/4 逻辑航迹起始准则,判断航迹起始是否成功;
第2 步:根据各群航迹中预测点的个数以及新起始航迹的数量,判断出所有未终止群目标航迹;
第3 步:由式(4)求出k+1 时刻所有未终止群航迹的预测值与k+1 时刻所有量测值之间的统计距离D;
第4 步:将所有的D 进行排序,选出最小值Dmin,并对最小距离对应的群航迹进行后续的状态更新,若Dmin≤γ,则采用最小距离对应的量测值进行滤波更新,并将该航迹预测点个数置0,否则采用直线外推预测值来完成航迹更新,并增加预测点个数,其中γ 是概率为Pg,自由度为Nz的卡方分布门限;
第5 步:当前群目标航迹更新完毕后,删除与该群航迹和量测值相关的所有数据和距离D;
第6 步:重复第4、5 步,直至群数据与量测值至少一个已被完全删除;
第7 步:若删除完毕后还剩余群数据,则对剩余群进行外推预测更新,更新完毕后,所有未终止群返回到第2 步执行下一时刻的操作;若删除完毕后还剩量测值,则量测值返回到第1 步参与下一时刻的航迹起始,所有未终止群返回到第2 步执行下一时刻的操作。
这样就完成了所有群目标的航迹起始、航迹维持与航迹终止,保证了空间群目标跟踪的稳定性与实时性。
3 航迹断续时的处理方法
空间群目标密集性高,目标间容易相互遮挡,从而造成航迹断续。若航迹中断时间较短,不会马上重新航迹起始,而是采用预测外推方法来继续更新航迹。但是一旦航迹中断时间较长,对于高速飞行的空间目标来说,得到的预测航迹会产生较大误差。这是因为其运动轨迹为椭圆弹道轨迹而预测外推轨迹为直线,此时会重新进行航迹起始生成新航迹,同时需要进行新旧航迹融合来提高数据精度。显然中断时间较长时预测航迹会有较大误差,容易造成错误关联和干扰航迹融合,文中提出轨迹预报来代替航迹预测的方法。
3.1 欧拉外推轨迹预报法
根据空间目标动力学模型[21-22],得空间目标的加速度为

以群航迹关联失败时的滤波更新状态值为预报点初值,结合其位置和速度值,即可计算下一时刻的空间目标位置和速度值,分别为

以此类推,可逐步推算出航迹关联失败后各个时刻的轨迹预报数据值。
3.2 预测与预报并行处理法
针对不同的航迹中断时间,采取不同的处理方法。设置预测点数上限m 和预报点数上限n(m<n),数据关联失败时,航迹预测与轨迹预报同时启动,根据中断时间长短的不同,处理主要分为以下几种情况:1)当预测点数未达到上限,航迹预测与轨迹预报并行存在,当有预测数据关联上量测,则预测终止,轨迹预报也随之终止;2)若预测点个数达到上限而预报点未达到上限,预测航迹终止,此时继续进行轨迹预报,并判断轨迹预报与新航迹的关联融合,若融合上新航迹则预报结束,否则继续预报;3)当预报点数达到上限,此时若依旧未关联融合上新航迹,预报结束。
航迹外推预测时协方差可以同步更新,波门可自适应选取,而轨迹预报时协方差不能实时更新,因此,航迹融合的关联门限需根据当前时刻的群速度加以设定。轨迹预报与新航迹关联融合时,首先将轨迹预报值与新航迹进行时刻对准,然后与新航迹最初的几个时刻状态更新值进行航迹关联判断,通过设定距离门限与检验概率判定轨迹预报与新航迹是否能关联融合。若航迹关联融合上则中断前已获取的目标信息可以在中断后继续对应使用,从而确保跟踪的精确度与实时性。
综上,基于全局最近邻的群目标关联与跟踪流程图如图1 所示。

图1 基于全局最近邻的空间群目标跟踪流程图
4 仿真分析
通过仿真弹道导弹群目标环境的典型场景来仿真空间群目标场景,设空间目标观测时间为0~860 s,雷达采样间隔为T=1 s,关机点弹头的经度、纬度和高度分别为0 rad、0 rad 和80 000 m,弹头在x,y,z 三轴上的初始速度均为3 000 m/s,同时设置15 个诱饵伴随空间目标飞行,诱饵释放时刻为第100 个观测点,诱饵相对弹头的释放速度在3 m/s 和10 m/s 之间按均匀分布随机取值。设雷达的方位和俯仰测角误差均方差均为0.001 4 rad,通过给定的误差均方差,基于高斯分布模型随机产生各观测时刻距离、方位角以及俯仰角误差数据,并叠加于仿真空间,生成雷达球坐标系下雷达对空间密集目标的测量数据,具体产生方法参见文献[24]。将量测转化到雷达ENU 坐标系下显示如图2(a),其中选取了一段数据进行局部放大如图2(b)所示。由图2 可见其轨迹满足弹道椭圆轨迹,符合空间目标运动轨迹要求。
为了验证文中算法的有效性,将其与分群后最近邻跟踪方法相对比,并将显示结果进行局部放大,其中最近邻法跟踪效果如图3 所示,文中方法跟踪效果如图4 所示。由仿真结果可知,该段测量时间内包含诱饵在内的16 个空间目标被分为6 个群,群跟踪可以很大程度上减轻传感器负担并增加跟踪的稳定性。图3、图4 之间对比可以看出,文中在最近邻基础上提出的改进算法的跟踪效果更加理想,可进一步解决关联错误,防止传感器错通道跟踪,提高数据精度,为后续的目标预报拦截打下良好的基础。
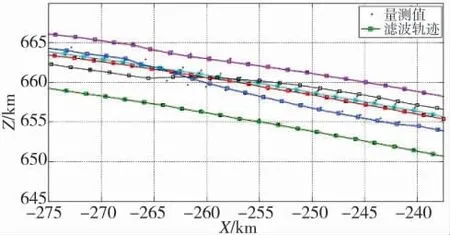
图3 分群后最近邻域法跟踪结果

图4 分群后全局最近邻法跟踪结果
设置中断时间分别为5 s 和15 s,即中断5 个和15 个测量点,设置蒙特卡罗仿真次数为100。某群航迹中断后对该群航迹分别进行航迹预测与轨迹预报,图5 是航迹中断15 s 过程中航迹外推和轨迹预测两种方法下跟踪航迹与真实航迹的误差对比,可以看出轨迹预报相对于航迹预测可以大大提高预测段的跟踪精度。新旧航迹融合的方法可以如下:航迹中断后,将预测航迹、预报航迹与新起始航迹进行时刻对准,并选取新航迹起始后的多个观测时刻(文中为前10 个观测时刻)的预测航迹、预报航迹以及新航迹数据作为航迹融合的判断数据。据此表1 给出中断5 s 和15 s 两种情况下分别进行航迹外推和轨迹预报得到的预测值与新起始航迹滤波值的位置误差对比。分析相同中断时间条件下,轨迹预报得到新旧航迹间距比航迹预测得到的小得多,在相同的融合判断条件下,新旧航迹更容易被融合为一条航迹,而且由中断时间5 s 和15 s 对比可以看出随着中断时间的增长,轨迹预报的优势将更加明显。综上分析,在航迹中断初期可以航迹预测为主,在航迹断续时间较长情况下,应该进行轨迹预报代替航迹预测,这样才能较好地实现航迹融合,提高数据精度。
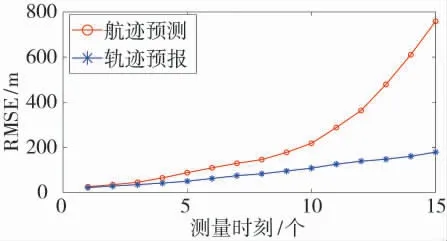
图5 中断15 s 过程中两种方法跟踪误差对比

表1 不同中断时刻后两种方法下的新旧航迹的RMSE(m)
5 结论
文中提出一种基于全局最近邻的空间密集群目标的关联与跟踪算法。对空间密集目标基于目标间距进行群的分割,并利用全局距离最近的群目标和测量数据优先进行关联与跟踪,从而确保关联上的全局最优性,提高关联的准确度与跟踪的精确度。同时针对航迹断续时间长短不同,提出航迹预测与轨迹预报自适应并行处理的方法,有利于减少短小航迹并增强新旧航迹的关联融合。通过仿真验证,文中算法能较好地完成空间密集群目标的关联与跟踪,在节省传感器资源的同时,能有效增强跟踪的稳定性,改善数据精度,从而提高传感器系统对空间高速密集群目标预报与拦截打击的精确度。
