基于机器视觉的足球运动员犯规动作特征提取研究
2020-09-22黄歆龙杨蓓蓓
黄歆龙 杨蓓蓓

摘 要:由于视觉分析存在误差,在高水平足球运动员人群中,传统足球运动员犯规动作特征提取方法存在犯规动作特征提取准确率低等问题.为此,提出基于机器视觉的足球运动员犯规动作特征提取方法.利用机器视觉系统获取足球运动员动作图像,基于阈值识别算法识别足球运动员犯规动作,以识别犯规动作图像为前提,采用Harris 3D算子建立犯规动作序列势函数,以犯规动作序列势函数为依据,通过AdaBoost算法筛选足球运动员犯规动作特征数据,以此为训练样本实现足球运动员犯规动作特征提取.仿真结果表明,所提方法在高水平足球运动员范围内犯规动作识别准确率较高,有效降低了识别的误差.
关键词:机器视觉;足球运动员;犯规动作;特征提取;阈值识别算法;Harris 3D算子
中图分类号:TP843 文献标识码:A 文章编号:1673-260X(2020)06-0049-04
引言
足球竞赛是世界第一大体育运动,是一项存在身体接触、激烈对抗的体育项目.随着足球运动员水平的不断提升,使攻守双方矛盾愈加激烈.在足球比赛中,允许运动员合理利用身体部位控球,但若利用身体部位做出踢人、撞人、拉人、绊人等不合理动作,以此获得攻防空间,上述动作即为犯规动作[1].
随着球技和战术水平不断提升,足球比赛节奏越来越快,导致足球比赛中拼抢行为愈加激烈.双方队员身体接触不断增多,足球运动员犯规动作的出现频率越来越高,导致运动员受伤事件屡屡发生.为了保障足球运动员身体安全,使其发挥最高水平,国际足联不断修改、完善足球比赛规则.与此同时,足球比赛激烈程度的增加,为裁判员判断带来了极大挑战.裁判员水平直接影响足球运动员战术水平的发挥.了解足球运动员犯规动作特征是提升裁判员业务水平的有效手段[2].
传统足球运动员犯规动作特征提取方法是将犯规动作描述为一连串符号,分解各个符号,识别犯规动作特征.但该方法在高水平足球运动比赛中存在犯规动作特征提取准确率低等问题.
为了解决上述问题,提出基于机器视觉的足球运动员犯规动作特征提取方法研究.机器视觉是人工智能发展的一个分支,利用机器代替人眼判断与测量.主要通过机器视觉产品将目标转换为图像信号,传输给专门图像处理系统,将图像像素的颜色、亮度、分布等转换为数字化信号,通过运算提取目标特征信息.仿真结果表明:所提方法可有效提高足球运动员犯规动作特征提取的准确率较高,且耗时较短.
1 足球运动员犯规动作特征提取方法研究
1.1 足球运动员动作图像获取
获取足球运动员动作图像是提取犯规动作特征的前提.由于传统方法获取的动作图像视觉误差较大,直接影响犯规动作特征提取准确率.为此,本文利用机器视觉系统获取足球運动员动作图像.
在机器视觉系统中,利用摄像头获取足球运动员动作图像[3].选取OV7670型号摄像头实现.OV7670型号摄像头是COMOS摄像头的元件,具备获取彩色图像的能力,感光阵列最高可以达到640*680,传输速率最高可达到30帧/秒.
该摄像头只有一组并行数据口,记为Y[7:0],通过数据口读取动作图像像素值,以并行方式获取足球运动员动作图像.配合OV7670型号摄像头获取图像的元件为PL与PS,依据行中断与场中断判断数据完整度[4].利用VGA接口显示足球运动员动作图像,VGA时序如图1所示.
其中,Data表示动作图像信息列;HSYNC与VSYNC表示信号列与信号行;(a)、(b)、(c)、(d)与(e)分别表示HSYNC信号列同步段、后廊段、激活段、前廊段以及列元素数量;(o)、(p)、(q)、(r)与(s)分别表示VSYNC信号行同步段、后廊段、激活段、前廊段以及行元素数量.
动作图像信号列与信号行每段像素元素数量情况如表1所示.
1.2 犯规动作识别
在获取的足球运动员动作图像基础上,基于阈值识别算法识别足球运动员犯规动作,为犯规动作序列势函数建立做准备.
足球比赛中会突发较多复杂情况,导致运动员动作图像存在复杂背景.为此,采用阈值识别算法识别犯规动作,步骤如下:
步骤一:假设动作图像有效像素点数量为Ne,动作图像为矩阵,四个点坐标为A(x1,y1)、B(x2,y2)、 C(x3,y3)与D(x4,y4),参数P、S计算公式为
P=(x2-x1)/(y3-y1),S=(x2-x1)*(y3-y1). (1)
步骤二:在犯规动作识别过程中,若像素点值大于识别阈值A,Ne+1.
步骤三:若像素点不存在规定范围内,更新坐标,扩大搜索区域.
步骤四:扫描完毕,获取Ne和识别目标.
步骤五:计算目标区域长宽比,与识别阈值相比较,若长宽比|1-P|小于A,转至步骤六.
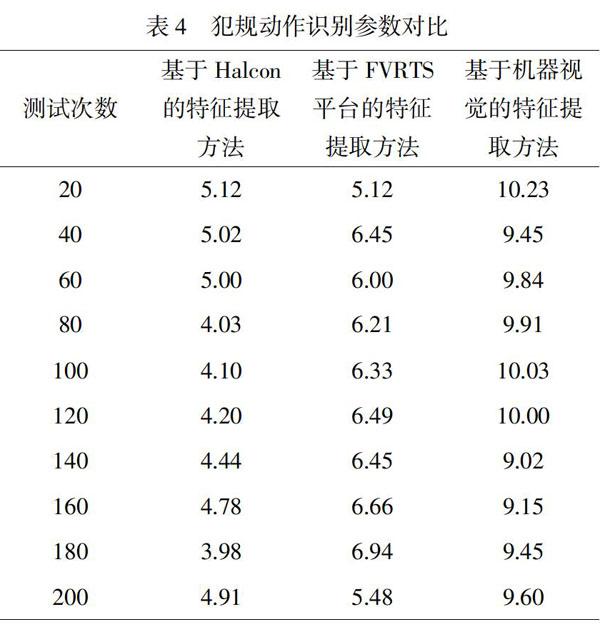
步骤六:计算目标区域大小,得到目标面积与图像面积比M=Ne/S,相较于识别阈值A,若|0.785-M| 步骤七:输出规范动作识别失败. 1.3 犯规动作序列势函数建立 在犯规动作识别结果前提下,采用Harris3D算子建立犯规动作序列势函数,为犯规动作特征提取提供支撑[5]. 利用Harris3D算子挖掘犯规动作,提取图像中每个不同犯规动作的时空兴趣点,获取梯度直方图与流光方向直方图特征,将其分别划分为72维与90维.融合梯度直方图与流光方向直方图,获得一个162维特征向量,构成犯规动作的底层特征.选取足球运动员关键骨架点,记为(xzi,yzi).依据人体构造特点,将足球运动员身体划分为肩部、左、右胳膊、左、右腿部、左、右脚七个局部参考点,记为(ai,bi). 犯规动作每个时空兴趣点与局部参考中心点的最短欧式距离为: n=, (2) 其中,n表示局部参考中心人体范围标记,称其为时空兴趣点范围,将其依据局部参考点划分为7个区域;(xj,yj)表示每个时空兴趣点. 将犯规动作定势时空兴趣点划分为三个层级,具体划分结果如表2所示. 采用K-means聚类底层犯规动作特征,聚类中心个数为K,获得K×162维犯规动作图像.同时产生三个层级七个区域的犯规动作图像,将每个区域中犯规动作定势持续的T帧定义为一个犯规动作的时空动作模块,该模块表示足球运动员某一部分犯规动作特征[6,7].连接两个犯规动作图像单元重叠帧数为T/2帧,将每个犯规动作图像中所有动作单元进行有机合成,得到一个具有长度的时空犯规动作单元序列. 经过K-means聚类得到犯规动作数据集,犯规动作图像呼应BOW特征表示为 fp=, (3) 其中,fp表示犯规动作图像p呼应的BOW特征;Kn表示n范围内聚类中心个数;N表示犯规动作图像时空单元序列长度. 前期融合BOW特征,融合公式为 Fp=Kn×N, (4) 其中,Fp表示犯规动作图像对应层级内每区域的融合特征. 依据公式(4)构建足球运动员犯规动作图像条件概率模型[8],表达式为: P(Y,h/X,)={Xi}ti=1*Fp×, (5) 其中,Y表示序列标记;h表示层级;X即{Xi}ti=1,表示任意犯规动作序列;?兹表示常数;?渍(Y,h,X)表示犯规动作序列势函数. 足球运动员犯规动作具有自身的变化规律,在公式(5)基础上,计算不同层级犯规动作序列势函数为: 其中,?渍1(Xj,hj)表示隐变量节点与预测节点之间关系;?渍2(Y,hj)表示隐变量节点与序列标点关系.当hj是犯规动作图像隐节点,并属于Y犯规动作定势类别,此时势函数为1,反之则势函数为0; ?渍3(Y,hj,hk)表示隐变量节点边与序列标记之间关系.当hj到hk犯规动作转换后符合Y转化进程时,此时势函数为1,反之则势函数为0. 1.4 犯规动作特征提取 在犯规动作序列势函数基础上,通过AdaBoost算法[10]筛选足球运动员犯规动作特征数据,以此为训练样本进行训练与识别,实现足球运动员犯规动作特征提取. 假设足球运动员犯规动作图像训练样本集为(x1,y1),…(xi,yi),…(xN,yN),其中,xi表示犯规动作图像样本数据;yi表示犯规动作图像样本标记.在训练样本N中任意选取犯规动作样本数据作为已知样本,以AdaBoost算法作为弱分类器,获取训练样本假设条件,以?渍(Y,h,X)为依据,计算足球运动员犯规动作图像样本错误率,得到: 其中,?着t表示样本错误率. 依据公式(7)计算结果,将提取犯规动作特征标记为1,其余标记为-1.通过迭代构建足球运动员犯规动作特征提取模型,模型表示为: 其中,di表示犯规动作序列中第i个特征数据;C(dj)表示训练样本中第j个犯规动作特征数据所属类别. 依据公式(8)实现基于机器视觉足球运动员犯规动作特征提取. 2 实验分析 為了验证提出方法的性能,设计仿真对比测试.通过对比本文方法、基于Halcon的足球运动员犯规动作特征提取方法与基于FVRTS平台的足球运动员犯规动作特征提取方法进行实验分析. 2.1 实验环境及参数 为了保障测试结果公正性,设置犯规动作捕捉测试室,安装三个摄像头获取动作图,机器视觉系统OV7670型号摄像头参数设置情况如表3所示. 2.2 实验结果分析 2.2.1 不同方法犯规动作特征提取准确率分析 犯规动作识别参数间接影响犯规动作特征提取准确率,犯规动作识别参数越大,表明特征提取准确率越高.通过测试得到犯规动作识别参数,实验结果如表4所示. 分析表4数据可知,提出方法犯规动作识别参数范围为9.02-10.23;传统代表方法犯规动作识别参数范围分别为3.98-5.12与5.12-6.94.相比之下,提出方法的犯规动作识别参数远高于传统识别方法.这是由于所提方法对犯规图像进行特征提取,为犯规动作序列建立势函数,对其进行了更为详细的分析,进而提高了所提方法犯规动作识别准确率. 2.2.2 不同方法识别稳定性分析 识别方法稳定性直接影响特征提取的准确率,为此利用盒须图比较提出方法与传统代表方法的稳定性.盒须图的上下两个端点表示稳定性参数最大值与最小值;上下两边表示不考虑误差的稳定性参数最大值与最小值;红线表示稳定性参数平均值.对比结果如图2所示. 分析图3可知,本文方法的稳定性参数最大值与最小值均较为稳定,而其他两种方法的稳定性参数最大值与最小值存在一定波动.验证了本文方法进行特征识别的稳定性较好. 3 结束语 本文提出基于机器视觉的足球运动员犯规动作特征提取方法,通过对图像的获取并分析图像的特征等,完成了足球运动员犯规动作特征的提取.仿真结果表明:本文方法可有效对足球运动员犯规动作进行识别,且犯规动作识别参数较大,具有一定实际意义. 参考文献: 〔1〕辛松和.我国职业足球运动员转会的委托代理关系及其特点[J].吉林体育学院学报,2018,34(02):7-10. 〔2〕杨映红,陈峰,陈海春.福建省足球运动员核心肌群稳定控制能力研究[J].体育科学研究,2018,22(01):71-76. 〔3〕陈廷标.中职院校足球队战术训练方案设计与作用研究[J].开封教育学院学报,2019,39(02):153-154. 〔4〕王思乐,王铭羽,杨文柱,等.基于时空加权的多特征融合动作识别算法[J].河北大学学报(自然科学版),2019,39(01):93-98. 〔5〕李丹,白国君,金媛媛,等.基于机器视觉的包装袋缺陷检测算法研究与应用[J].激光与光电子学进展,2019,56(09):180-186. 〔6〕胡佳贝,刘喆,张鹏飞,等.基于离散Morse理论的散乱点云特征提取[J].光学学报,2019,39(06):224-233. 〔7〕曹景胜,李刚,石晶,等.基于类Haar特征和自适应提升算法的前车识别[J].科学技术与工程,2019,19(07):161-165. 〔8〕何冰倩,魏维,宋岩贝,等.融合时空兴趣点和多元广义高斯混合模型的人体动作识别[J].成都信息工程大学学报,2019,34(04):358-364. 〔9〕吴晖辉,曾宪荣,赖燕君,等.基于机器视觉的线束连接器字符检测[J].测试技术学报,2018,32(02):174-179. 〔10〕都明宇,王志恒,荀一,等.多模式人手动作分类识别方法[J].中国机械工程,2019,30(12):1474-1479.
