光学测量精度中图像亚像素定位研究
2020-09-22周丽周健
周丽 周健
【摘要】测量的高精度是测量的难点和重点。利用光测进行各种精密测量时,主要有三个环节对测量精度起到关键影响:①摄像系统的物面分辨率;②摄影系统的标定(如光心、光轴和焦距等内外系统参数)和误差修正精度;③图象中目标的定位精度。在光测数字图像处理领域,可以利用软件处理的方法来解决图像中目标的高精度定位问题。如果能用软件将图像上的特征目标定位在亚像素级别,就相当于提高了测量系统精度。例如,当算法的精度为0.1个像素,则相当于测量系统的硬件分辨率提高了10倍。因此,对图像中目标进行高精度的定位成为提高光学测量系统的重要环节,本文对光测中的亚像素定位进行了研究。
【关键词】高精度 精密测量 亚像素定位 亚像素算法
一、亚像素定位背景
在测量视场一定的条件下,提高光学测量系统精度最直接的方法就是提高CCD摄像机分辨率,即增加像素点阵数。然而这种提高硬件分辨率的代价是相当昂贵的。并且在图像传输速度和图像存储容量方面大大增加了对系统的要求。因此,通过提高硬件分辨率的方法来提高测量精度是受到限制并且是不经济的。
对图像中目标进行定位是基于图像的精密测量和运动测量中最基本和最重要的任务之一。对目标进行定位通常要经过两个步骤:目标识别和目标定位,也可称为目标粗定位和目标精定位。目标识别或初定位是指在某一特定的图像区域内确认是否有待测目标存在,或者确认待测目标在某一特定的区域内。现已有大量目标识别方面的算法,特别是在计算机视觉和模式识别领域有大量相关的工作,因此在测量粗定位应用中可以直接参考借鉴这些算法。我们将重点放在精定位,即亚像素定位技术上。
采集到的图像在计算机里是由表示像素灰度值的一个矩阵来表示的,所以如果将计算建立在像素的级别上,那么从理论上来讲图像的位置精度也不可能超过像素级别,也就不能达到高精度的要求,亚像素法是为了提高图像的识别的精度而提出的一种超过图像分辨率的定位方法。一般情况下,像素是组成图像的基本单位,也就是图像的分辨率,而亚像素精度是比图像分辨率还要高,甚至高很多,这似乎是违反常理的。但是亚像素定位技术是有前提的,即目标不是由孤立的单个像素点,而必须由有特定灰度分布和形状分布的一组像素点组成的,例如目标特征点是圆点、角点、“十”字交叉点、直线、特征曲线等,有明显的灰度变化和一定面积大小。目标特征主要分为基于几何特性,基于灰度分布特性和基于几何与灰度耦合特性三大类。
二、亚像素定位原理
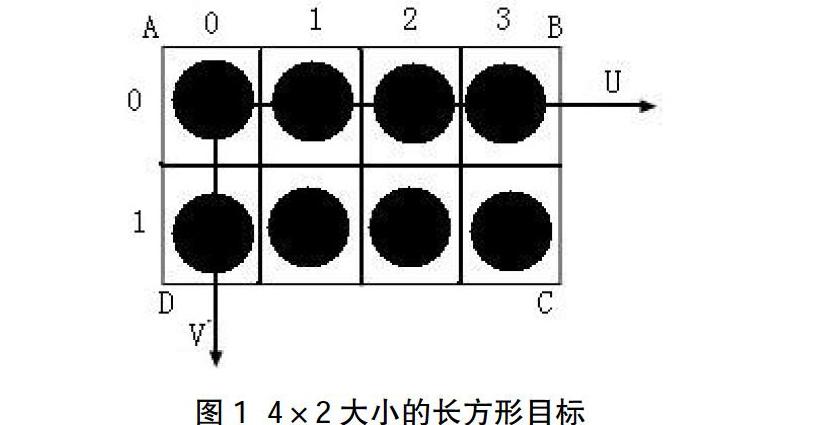
利用预知的目标特性,对图像进行处理分析(例如滤除噪声,突出特征,提取特征和拟合灰度特征等),识别并确定与目标特征最吻合的位置。在此分析定位过程中,采用浮点运算,可实现对目标优于整像素精度的定位。这种利用目标特性从图像中分析计算出最符合此特征的目标位置的方法称为图像目标亚像素定位技术。例如,在理想成像条件下,一幅图像经过数字化后,它由8个像素构成的矩形ABCD,,其长度为四个像素,宽度为两个像素,中心坐标为(1.5,0.5),如图1所示。
如果取整像素值作为目标中心坐标,则定位误差为0.5个像素。而用形心法计算目标各像素坐标的平均值,则可以得到正确的目标中心位置,因此,形心法就是一种最简单的亚像素定位算法。
从亚像素定位原理和上面的例子可以总结出应用亚像素定位技术需要的两个条件:第一,目标由多个点组成,并具有一定的几何和灰度特征。如果目标是一个孤立的像素,则其位置就是此像素的坐标位置,无法细分;第二,对具有一定特征的目标,必须明确目标定位基准点在目标上的具体位置。例如对于矩形目标,定位基准点是矩形的中心点,还是端点;对于某一目标定位基准点是目标的最亮点或最暗点,还是灰度变化最大点等。待定目标的特征可以是人为建立的理想模型,也可以是从某一实际图像中提出的特定场景,或者两者的结合。
目标亚像素定位技术的概念与通过对图像进行插值运算得到图像像素之间的灰度值和坐标值的概念完全不同。从理論上说插值法并没有增加新的信息量,只是根据插值算法的不同,假定像素之间的灰度是按线性或插值公式的规定变化的。这种插值或重采样处理可以改善图像的视觉效果,但与目标特性这一重要特性无关,因而简单插值对目标亚像素定位并无帮助。
亚像素算法的建立与选择是基于许多前提条件的。首先假定用普通的特征检测法对目标进行初步定位,即得到了整像素精度的定位,此过程被称为初定位。其次,为了使提出的算法位置不变,通常建立一个局部的坐标系,其原点建立在初定位处。这样可以预先计算一些所需量,并且保持像素坐标是较小的数,从而改善数值计算特性,还可以明显减少计算量。再次,许多亚像素技术是建立在一个局部图像模式或局部特征模式基础上的。
三、常用的亚像素定位方法
为了提高定位精度需要对目标进行亚像素定位。亚像素定位的方法主要有:矩阵法、数字相关法、拟合法,数字相关法又分为:亚像素步长相关法和相关系数拟合极值法,本文采用数字相关法。
(一)亚像素步长相关法
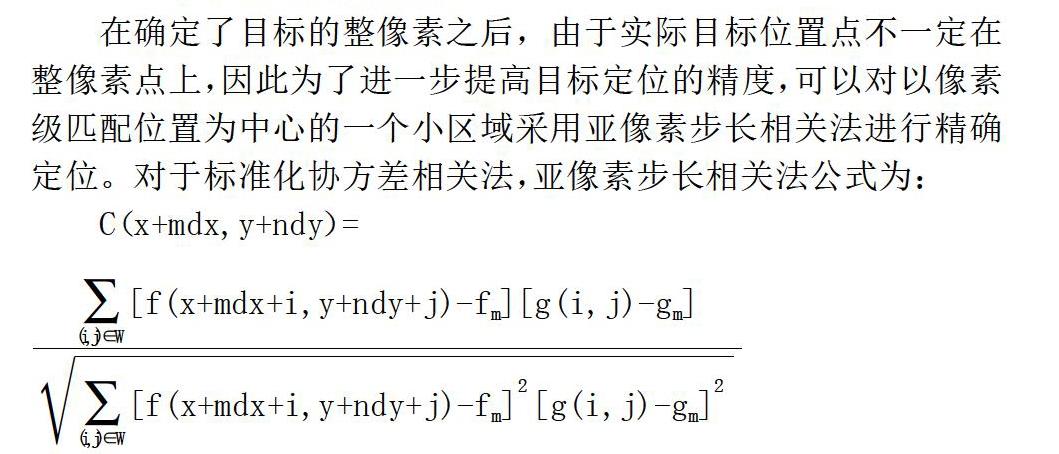
在确定了目标的整像素之后,由于实际目标位置点不一定在整像素点上,因此为了进一步提高目标定位的精度,可以对以像素级匹配位置为中心的一个小区域采用亚像素步长相关法进行精确定位。对于标准化协方差相关法,亚像素步长相关法公式为:
C(x+mdx,y+ndy)=
式中:C(x+mdx,y+ndy)为相关函数;f(x+mdx+i,y+ndy+j)为某一时刻的视觉图像;为g(i,j)模板图像;fm为f(x,y)窗口内的灰度平均值;gm为g(i,j)窗口内的灰度平均值;W为模板区域;dx,dy为宽度x和高度y方向上的步长;m,n为步数(整数值)。亚像素步长相关示意图如图4-6所示,其中α=mdx,β=ndy为插值点在α-β坐标系下的作标值。f(x+mdx+i,y+ndy+j)中的x+mdx+i和y+ndy+j一般不是整数值,对于非整像素上的灰度值,可以采用插值法获取。常用的插值法有最近邻插值法、双线性插值法和立方插值法等。最近邻插值法一般在处理图像边界时使用;双线性插值法速度快、实现方便但精度低;立方插值函数具有较好的带通特性且精度高。因此,本文采用立方插值,其核函数为:
(二)曲面拟合法
曲面拟合法的思想是以像素级上的最佳匹配点为中心按相似性度量进行曲面拟合,然后通过数学方法得到极值点的精确位置。由于相关函数矩阵在以最大值为中心的一个单峰区域上通常近似地满足高斯分布,因此可以通过拟合方法得到该区域的解析曲面函数,取曲面极值点为目标的亚像素位置。曲面拟合法就是在以像素级匹配点为中心的窗口内,对各像素所在位置处的相关函数值作曲面拟合,然后对拟合曲面求导获得极值点坐标,该极值点坐标就是亚像素级匹配位置。
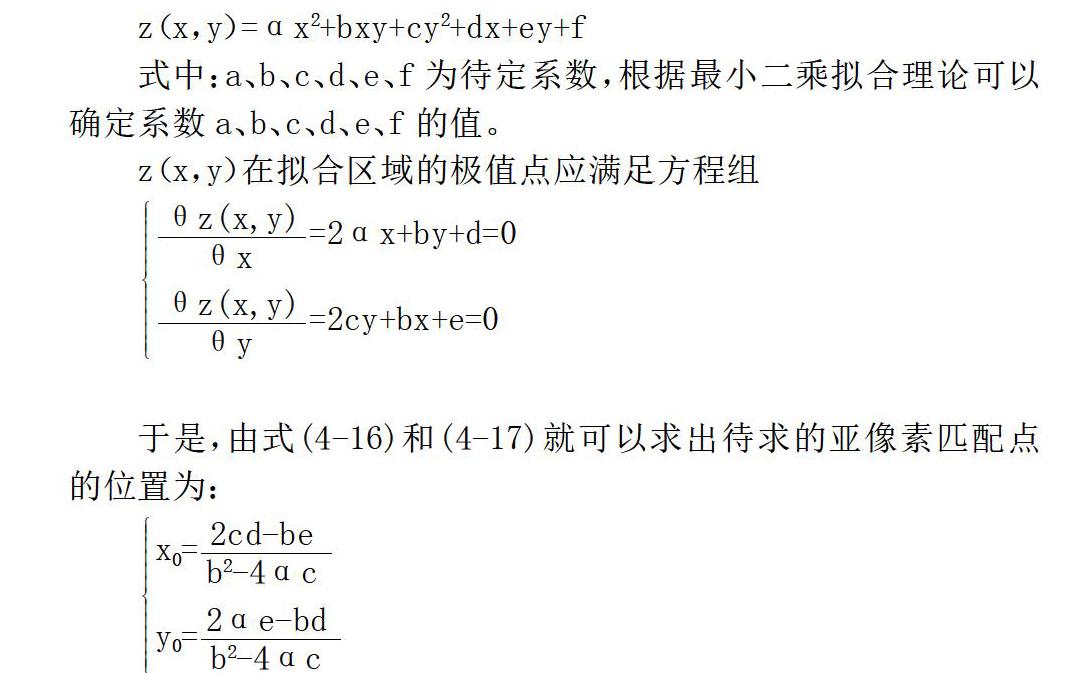
拟合函数选择范围很大,常用的曲面拟合函数有高斯函数和二次多项式。对于相关函数曲面比较平缓的情况,高斯拟合不仅需要较大的拟合窗口,而且可能产生较大的误差。因此实际中常采用二元二次多项式来拟合相关函数曲面。用二次曲面函数z(x,y)对最佳匹配点为中心的窗口内各点对应的相关函数c(i,j)进行拟合,求得z(x,y)取极大值时的坐标(x0,y0),即为更精确的亚像素匹配配置。设待求的二次曲面为:
z(x,y)=αx2+bxy+cy2+dx+ey+f
式中:a、b、c、d、e、f为待定系数,根据最小二乘拟合理论可以确定系数a、b、c、d、e、f的值。
z(x,y)在拟合区域的极值点应满足方程组
=2αx+by+d=0
=2cy+bx+e=0
于是,由式(4-16)和(4-17)就可以求出待求的亚像素匹配点的位置为:
x0
=
y0
=
四、影响亚像素定位精度的因素
在利用亚像素定位技术中,影响亚像素的精度的因素有:
(1)模板的选取。模板选取可分为理想模板和原图像目标模板。理想模板是根据定位目标的几何与灰度特征,用数学表达式来仿真制作一个理想的模板,原图像目标模板是在已知目标特征的图像上首先确定目标位置,然后以该目标点为中心选取一个灰度矩阵为模板。若采用原图像目标模板,则图像的质量对测量精度有较大的影响。模板的大小也是影响亚像素定位精度的一个关键因素,模板取得过小时,计算结果的标准差比较大,结果不稳定;当模板取得过大时,会降低对目标特征的敏感性,并且计算量又明显增加,计算速度会明显下降,因此在实际得算法设计中,要综合考虑、权衡利弊,取一个比较适中的模板大小。研究表明,模板尺寸与特征尺寸之比应为1:1到2:1,可得到最佳的相关结果。
(2)拟合窗口的影响。在对整像素搜索所得的相关系数矩阵进行二次曲面拟合时,拟合窗口可以选取3×3或5×5(pixel),研究表明,拟合窗口取3×3(pixel)为佳。
(3)相关函数的影响。整像素位移相关搜索时选取上述的常用的几种不同相关函数对计算结果的影响可以忽略不计。
五、小结
本文主要研究了一些光学测量关键技术。特别采用了亚像素定位技术,利用软件的方法提高了测量精度,并通过试验对测量系统进行了标定。解决了高精度远目标的微小位移测量的技术问题。达到了高精度、低成本、安装和使用方便的远目标小位移实时测量系统的设计要求。
参考文献:
[1]van der Veen Cornelis,van Vliet Marcel,de Boer Ane. Time-related deflections of cantilever bridges. Congress on Computing in Civil Engineering, Proceedings. 1994.
[2]Robertson. Ian N. Prediction of vertical deflections for a long-span prestressed concrete bridge structure. Engineering Structures. 2005,(10).
[3]李宇峙,邵臘梅.路面路基工程检测技术[M]. 北京:人民交通出版社,2003.
[4]Norman P.J, Snowdon R.A, Jacobs J.C. Pavement Deflection Measurement and Their Application to Structural Maintenance and Overall Design. Report:TRLL-LR-571, 1973:57.
[5]Hossain M, Long B, Kotdwala S.J. Seasonal and Hourly Variation of Pavement Deflections Measured with the Falling Weight Deflectometer (FWD). Kansas Dept of Transportation Jopeka. 1996,(8):196~204.
[6]王晓谋.高等级公路软土基路堤设计与施工技术[M].北京:人民交通出版社,2001.10.
[7]王绍民,夏诚,陈昌林.真空激光自动监测大坝变形技术[M].物理,2001, (3):161~164.
[8]朱煜,朱日宏,聂守平.激光准直自动化监测大坝变形方法的研究[N].光子学报,1998,(2):189~192.
[9]冯林,李克绵,孟中.真空激光准直监测大坝变形系统[J].大坝观测与土工测试,1999,(5):39~42.
