一类四维多项式系统非双曲奇点的稳定性与分岔
2020-09-22陈晓锋
陈晓锋
(福州外语外贸学院公共教学部,福建福州350202)
常微分方程稳定性理论和定性理论[1-6]是动力系统的2个重要研究分支,是非线性科学基础理论的一个范畴,并被运用到生态系统[7-9]等各种领域.在平面系统中,目前已经得到了一些基本的结论和结果,如极限环[4]和同宿轨分支[6].但是在高维空间中,对应的结果较少.对高维空间中的多项式微分系统进行定性分析是困难的,因为在高维空间中,多项式微分系统轨线的拓扑结构比较复杂,比如2个极限环会出现二维平面系统所没有的扭结现象.对这类问题,学界还没有找到普遍适用的方法.
考虑一类自治非线性系统

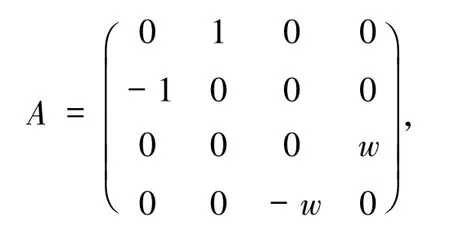
其中F:R4→R4是光滑函数.假定原点O是系统的平衡点,即F(0)=0.假定其雅克比行列式 DF(0)=0具有两对共轭虚根,也就是假定原点O是非双曲奇点.假定线性化后,(1)式可以转化为

其中
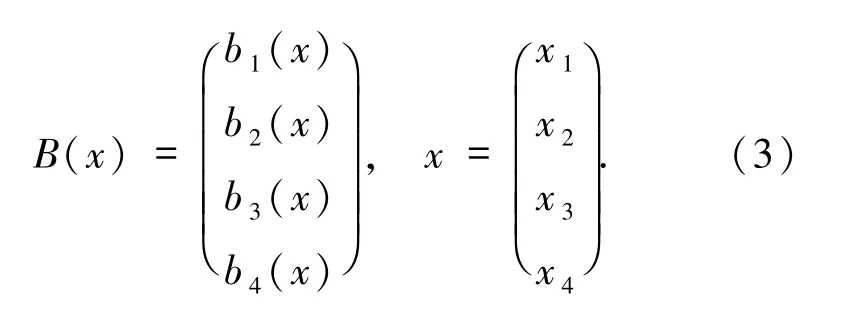
bi是次数大于1的多项式,其线性化系统的解具有不变曲面

定义 1[5]平衡点O称为柱形中心,若系统(2)具有R4中的形如(4)式的不变超曲面.
定义2[5]平衡点 O称为球形中心,若系统(2)具有 R4中的 F(x1,x2,x3,x4)=c的环绕平衡点O的不变闭超曲面.
本文对一类四维3次微分方程的非双曲奇点进行分析,通过矩阵代数的方法得到了平衡点的稳定性与不变闭曲面分岔的产生条件.
1 非双曲奇点的稳定性
考虑系统
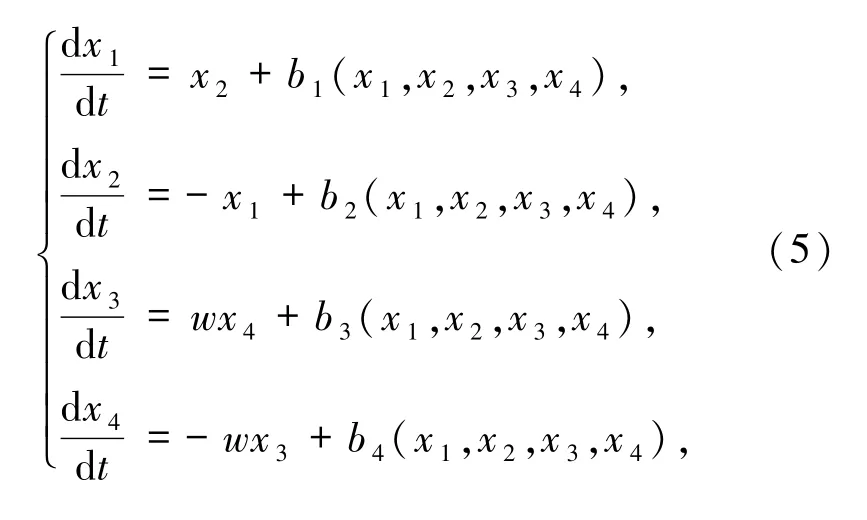
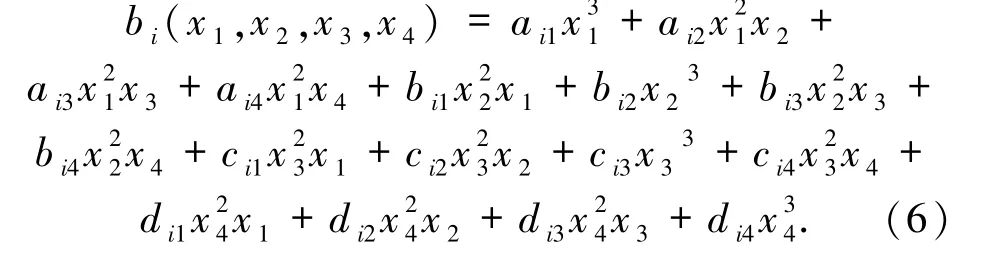
其中 bi(x1,x2,x3,x4),i=1,2,3,4 都是关于 x1、x2、x3、x4的 3 次齐次多项式:
可以用矩阵的形式将上述系统写为
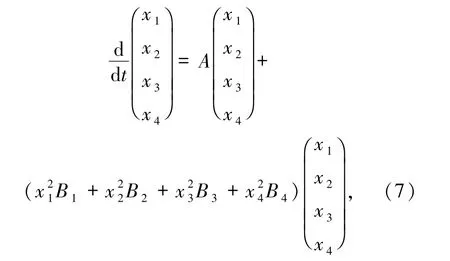
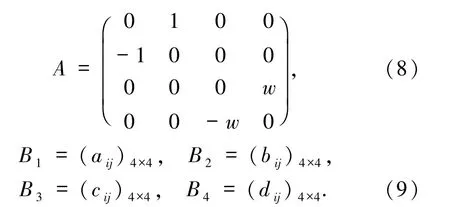
其中
将(7)式转置[10]可得
由于A+AT=0和Bi+都是实对称矩阵,其特征值都是实数,并且存在正交矩阵P:
记
从而有
且

注意到正交变换不影响解的稳定性,可以得到原点O的稳定性与Bi+的正定性之间的关系.
定理 1.1系统(5)中,当所有2,3,4是负定的,则原点O是渐近稳定的;当所有是正定的,则原点 O 是不稳定的.
证明取Lyapunov函数
则有
从以上定理的证明中,易得如下2个定理:
定理 1.2系统(5)中,当中有一个是负定的,其余是半负定的,则原点O是稳定的;当中有一个是正定的,其余是半正定的,则原点O是不稳定的.
定理 1.3当则在R4中,系统(5)有一个不变闭超曲面:

即原点是一个球形中心.
定理1.4当是不定矩阵,且具有至少一个正的特征值其它3个矩阵与之满足
则原点O是不稳定的.
证明情形1有一个正的特征值其余3个特征值分别为.
由条件可知:存在一个正交矩阵 P1=(pij)4×4使得
记
则
因为


用 -y2、-y3、-y4分别替代 y2、y3、y4,并做转置,可得
取
令
可见V在D的边界上取值为0,而V在D的内部是正定的,可得
并注意到
与|P1|=1 以及

有

由假设条件有

故存在一个常数σ>0,使
因此,原点O不稳定.
情形2 B1+有2个正的特征值与,其余2个特征值分别为负值<0与<0.对这个情形,只需将V函数取为

将区域D取为

即可得到证明.
事实上,从定理的证明中,发现只需要Bi+其中之一具有定理 1.4 所需的性质,其余矩阵与此矩阵的距离如上所示就可以得到与定理1.4相同的结论.并且A的条件可以降低到只要满足A+AT=0,即A是反对称阵即可.
2 不变闭超曲面分岔
考虑对系统(3)细微的扰动,这个扰动是
其中0<λ≪1,I是4×4单位阵.可以得到,在Bi+都是负定的条件下,系统存在不变闭超曲面分岔.
定理 2.1当都是负定的矩阵,则系统(33)在原点O处至少存在一个不变闭超曲面,且此不变超曲面具有性质:存在δ>0,曲面的δ邻域U(Σ,δ)以之为ω极限集.
证明当 λ=0时,系统(33)变为系统(5),由定理1.1知:原点O是渐近稳定的,当λ>0,原点O不稳定.记,则有 b≤a<0.若 b<a,取 ρ>0,令
则H=0是一个闭超曲面,沿着系统(33)的导数为