二次雷达视频处理时钟分析
2020-09-22吴晓华吴兵罗海邱忆
吴晓华,吴兵,罗海,邱忆
(四川九洲空管科技有限责任公司,四川 绵阳 621000)
二次雷达是空中交通管制系统中的重要组成部分,随着民航的飞速发展,空中目标越来越多,由于应答信号的串窜扰、混扰、多径、交织等问题,对目标译码带来严重影响。在译码过程中,视频信号的提取尤为重要,直接关系到译码的正确性。根据ICAO(International Civil Aviation Organization)附件要求,二次雷达的发射和应答信号都有明确要求,信号的上升沿和下降沿有严格要求,针对信号特点,采用不同的时钟处理,对视频信号的处理具有较好的处理效果。
本文首先介绍了二次雷达应答信号格式,说明了应答信号的特点,根据信号特点阐述了应答信号提取过程中时钟对信号的影响,详细分析了不同时钟情况,对应答信号处理的特点,给出了二次雷达视频处理的时钟最佳。
1 应答信号根式
二次雷达系统的信息交换通过上行询问和下行相应的应答格式来完成,其中,信息内容通过脉冲编码方式来实现。在空中交通管制中,主要使用A 模式用于询问目标代码,C 模式用于询问高度。其中A 模式的脉冲间隔为8us,C 模式的脉冲间隔为21us[1]。机载应答机根据接收到二次雷达的询问信号,根据询问的脉冲间隔,自动的应答相应的脉冲信号。
应答机的应答信号如图1 所示,应答码共16个脉冲信息码组成,每个码位有两种状态,即有脉冲和无脉冲,其中“1”状态表示有脉冲,“0”状态表示无脉冲。F1 和F2 为应答信号的框架脉冲,F1 和F2 的前沿间隔为20.3us,脉冲宽度位0.45us,相邻脉冲之间的间隔为1.45us,码位X 为备用位,两个框架脉冲直接的其余12个码位为应答码[2]。SPI 码位是特殊位置识别码。码位的提取直接影响到二次雷达性能和效果,利用不同的时钟,对实际码位的提取有重要的影响,在有交织和脉冲干扰情况下,码位信息和位置容易出错。
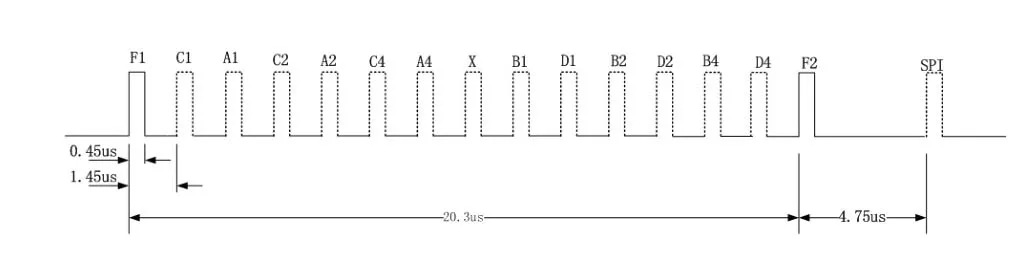
图1 应答信号格式
2 视频脉冲的提取方法
应答机的应答脉冲宽度为射频信号输出的半电压点,因此,根据视频信号下降6dB 可以得到脉冲的宽度,有效提取视频信号的脉冲宽度,对后端的译码和数据处理至关重要。视频信号提取如图2 所示,视频输入信号为S1,输入信号对应6dB 值为M,从信号顶部下降6dB 所对应的脉冲宽度为D。首先,将输入的视频信号进行延时T1,并将信号幅度增加6dB,此时的信号为S2。同时,将输入的信号延时T2,得到信号S3。比较信号S2 和S1 的可以提取出脉冲的前沿,比较S2 和S3 可以提取脉冲的后沿,最后,将前沿和后沿信号相与,便可准确提取出脉冲的宽度。
根据图2 的方法可以提取脉冲的前沿(ALE-Actual Leading Edge),ICAO 附件10 中允许应答脉冲持续时间在0.35 ~0.55us,当脉冲的宽度超过0.55us,有可能为两个脉冲信号的重叠,可以根据脉冲的后沿倒退的方法来提取重叠脉冲的前沿,该前沿称为伪前沿(PLE-Pseudo Leading Edge)。有时出现脉冲宽度超过两个脉冲的宽度时,可以认为有3个脉冲存在,此时,脉冲的前沿和后沿比较容易确定,另外一个脉冲可以根据前沿向后0.484us 得到额外前沿(XLE-Extra Leading Edges)。有效提取脉冲的沿后,可以进行相应的译码处理。

图2 视频提取方法
3 不同时钟处理分析
由于应答机的脉冲宽度为0.35 ~0.55us,同时,在实际工程中,二次雷达系统的接收机中滤波器有带宽限制,会使接收到的应答视频信号上升沿和下降沿变长,处理视频的时钟和应答信号的误差匹配就尤为重要。在数字处理过程中,采用高频率的时钟,会造成将窜扰信号采集到,造成目标信息错误。当采用低频率的时钟时,会遗失有效信号,造成目标信息丢失。选取一个适当的处理时钟,对目标的视频信号提取具有重要的影响。本文利用图2 的提取方法,处理脉冲间隔为1.45us 的两个脉冲,脉冲顶部宽度为0.45us,脉冲的上升沿为0.1us,下降沿为0.2us 的脉冲信号,处理后得到不同的脉冲宽度。
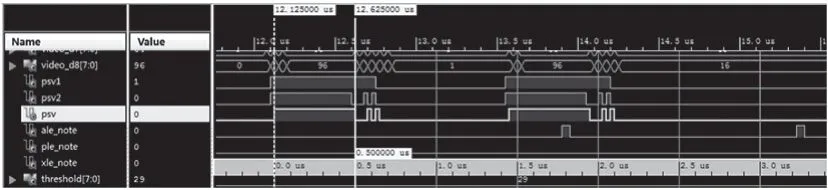
图3 40MHz时钟

图4 10MHz时钟

图5 5MHz时钟
从图3 ~5 可以得出,当采样时钟为40MHz时,得到的脉冲宽度为0.5us,脉冲的间隔为1.45us,处理的后视频信号中出现毛刺现象。当采样时钟为10MHz时,得到的脉冲宽度为0.5us,脉冲的间隔为1.5us。当采样时钟为5MHz时,得到的脉冲宽度为0.6us,脉冲的间隔为1.6us,出现了PLE脉冲。采用高频率时钟,比如,40MHz时钟,可以准确地提取到脉冲的时间间隔信息,同时,会引入毛刺信号。采用较低的时钟频率,造成脉冲的沿提取错误。因此,在提取视频信号的时钟频率应与脉冲的上升沿、下降沿和脉冲的误差相匹配。
在二次雷达系统中,脉冲信号的脉冲上升沿为0.05 ~0.1us,脉冲的下降沿为0.05 ~0.2us,为更好地处理脉冲边沿信号和覆盖有效脉冲的宽度,同时,避免窜扰信号的干扰,选择处理时钟频率范围为6 ~10MHz。结合工程实际,选择处理时钟为8MHz时,可以较好地处理脉冲沿和窜扰等干扰信号。通过实际工程使用,对二次雷达目标的译码概率和解交织情况均可以得到改善。
4 结语
本文针对二次雷达应答视频信号的处理时钟问题进行了分析,对不同处理时钟频率进行仿真分析,对视频的不同处理时钟出现的问题进行了分析,结合工程实际,给出了最佳的处理时钟频率,并在工程实践中进行验证,目标译码效果得到改善。本文的处理时钟频率在空管系统中的应答机同样适用。
