一种无卫星辅助的制导弹药滚转角误差修正算法
2020-09-22高贤志
高贤志, 丛 凯, 刘 洋
(1. 海军装备部驻北京地区第三军事代表室,北京 100074;2. 北京自动化控制设备研究所,北京 100074)
0 引言
传统的海军炮射弹药通过舰炮发射,凭借自由落体去攻击目标,命中精度低、射程短,已经难以适应现代战争的需要,如何让传统的弹药武器获得更加强大的作战能力和更高的作战效费比已经成为了提升部队战斗力的一个重要突破口。制导弹药的命中精度高、射程远、使用灵活,已经被越来越广泛地用于打击陆地目标、应付恐怖主义威胁、为抢滩登陆提供火力支援等情况[1-3]。
微机电系统(Micro-Electro-Mechanical System,MEMS)惯导系统具有体积小、质量小、成本低、抗过载能力强等众多优点,在舰炮制导弹药中有着广阔的应用前景。制导弹药在飞行过程中存在旋转运动,通过高速旋转产生的陀螺效应获得一定的稳定性。由于炮射运动的特点,制导弹药MEMS惯导系统需要在空中完成对准和导航,一般需要卫星辅助。但是,实际的战场环境可能存在多种干扰,制导弹药的体积约束导致其很难安装抗干扰接收机,因此弹体在飞行过程中可能会出现卫星失锁。在无卫星辅助的条件下,由于旋转弹的滚转角速率误差受标度因数误差的影响很大,滚转角误差会迅速增大[4-5]。滚转角的精度对旋转弹的弹体控制精度具有重要影响,因此如何实现滚转角精度保持是弹药制导需要解决的关键问题之一[6-8]。
制导弹药在发射过程中有一段高过载时间,过载量级高且过载时间长,这对惯导系统的结构强度设计提出了较高的要求。制导弹药在发射后通电,MEMS惯导系统必须在弹药出膛后高速旋转及弱失重运动状态下进行初始对准,技术实现难度大。对准算法的设计需要有效抑制因弹体旋转、弹体振动、基准信息精度低、惯性仪表误差、失重等因素对对准造成的影响,提高对准精度及对准的可靠性,以满足制导弹药的初始对准精度要求。制导弹药飞行动态较大,载体出膛后运动速度约为2倍声速,末端也接近1倍声速;且在空中飞行的加减速过程中,还存在复杂的多自由度耦合。在这种高动态条件下,惯导装置受仪表的非线性误差和系统的动态导航等因素影响强烈,因此,需采用某些技术手段实现高动态条件下的高精度组合导航姿态测量。
本文提出了一种基于自适应Kalman滤波的制导弹药滚转角误差修正算法。在前期对准导航计算得到的初始姿态的基础上,利用制导弹药高速旋转的特性,建立了弹体发射坐标系导航误差方程。通过自适应Kalman滤波实现对各项误差的准确估计,降低了对准过程中对卫星的依赖,提高了系统的自主性。
1 制导弹药旋转特性分析
制导弹药在飞行过程中存在绕弹体纵轴的高速旋转运动,图1所示为某型制导弹药的典型飞行轨迹,旋转速度由发射后50rad/s下降到1rad/s,假设导弹飞行过程中受到沿弹体侧向的干扰力矩为Mz,可以得到由干扰力矩产生的进动角速度ωy为
ωy=Mz/(Jxωx)
(1)
式中,Jx为弹体绕其纵轴旋转的转动惯量;ωx为弹体纵轴旋转角速率。
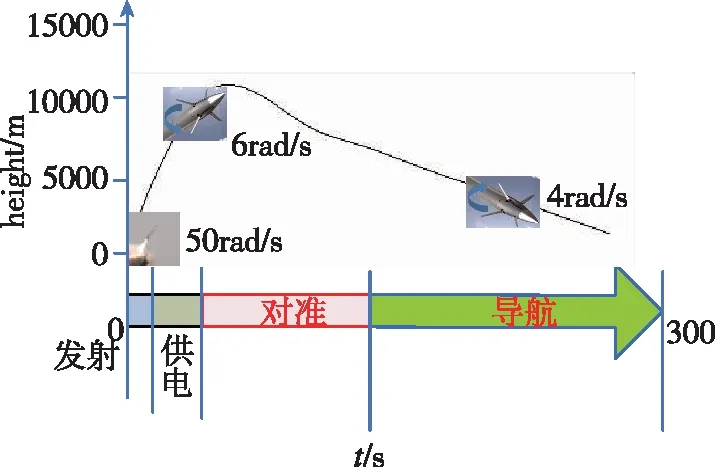
图1 制导弹药典型飞行轨迹Fig.1 Projected trajectory of guided munitions
由于弹体高速旋转刚体的定轴性,制导弹药在飞行过程中短时间内(不大于10s)航向基本保持稳定。考虑到马格努斯效应的影响,可以认为制导弹药在飞行过程中航向不变,只存在沿弹体的纵向速度和纵向位移,沿弹体的侧向速度和侧向位移有一定波动但其统计值为0[9-12]。
因此,可以利用飞行过程中MEMS惯导系统解算得到的侧向位移、侧向速度与弹体实际侧向位移、侧向速度做差,并利用侧向位移为0的特点进行滤波计算,实现对MEMS惯导系统滚转角姿态误差的准确估计与修正,从而提高制导精度。
2 滤波模型建立
制导弹药在飞行过程中存在绕其纵轴的高速旋转,通过单轴旋转效应分析可以得到,由垂直于旋转轴方向的陀螺和加速度计常值零偏引起的导航误差能够在一定程度上被抑制[13-14]。沿旋转轴方向的陀螺零位、标度因数及加速计零偏、标度因数没有因单轴旋转效应而被抑制,是MEMS惯导系统的主要误差源[15-17]。
选取弹体发射坐标系下MEMS惯导系统的侧向位置误差δSz,侧向速度误差δVz以及弹体发射坐标系下三轴失准角φx、φy、φz为滤波状态变量;另外,由于沿弹体纵向的加速度计零偏与标度因数误差所激励的位置、速度误差与弹体侧向始终正交,无法利用侧向位移为0的特点进行观测和估计,只将沿弹体纵向的陀螺标度因数误差δKgx和陀螺零偏εx作为状态量进行估计,可以得到系统状态变量X为
X=[δSzδVzφxφyφzδKgxεx]T
(2)
旋转制导弹药空中飞行时间较短,忽略地球自转角速率以及载体运动旋转角速率的影响,可以得到发射坐标系导航误差方程。
其中,侧向位置误差方程为
(3)
侧向速度误差方程为

(4)
失准角误差方程为
(5)

(6)
(7)
(8)
(9)
(10)
式中,ψ0为弹体初始航向角;γ、θ分别为滚转角和俯仰角;φ、λ分别为弹体所处的纬度和经度。
(11)
建立系统状态方程如下

(12)
式中,A(t)为系统状态矩阵;W(t)为系统噪声矩阵。由于精对准时间较短,可以认为陀螺标度因数误差和陀螺零位为常值,结合前文推导的发射坐标系导航误差方程,可以得到系统状态矩阵A(t)中各元素的值,如表1所示。
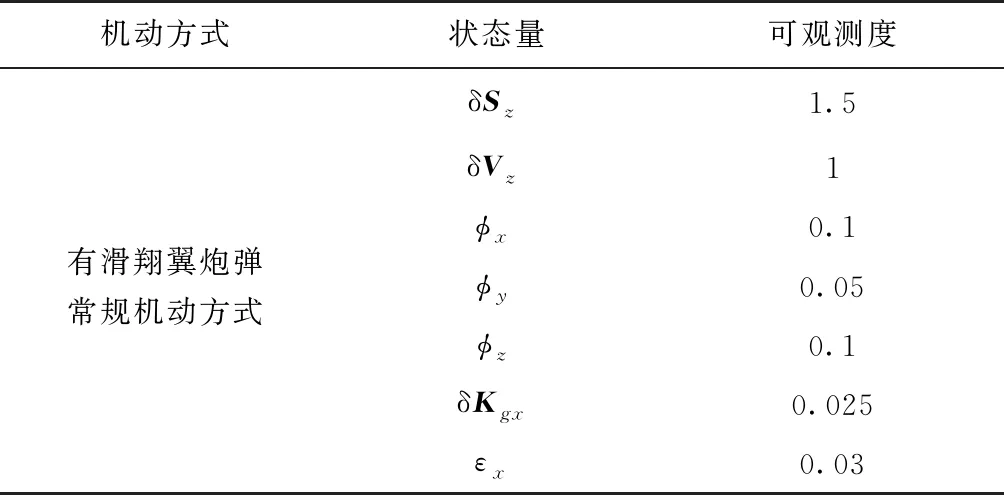
表1 SVD状态变量可观性分析
从可观性分析可以看出,状态量δSz和δVz的可观性较高,选取发射坐标系下MEMS惯导系统侧向位移误差以及侧向速度误差作为滤波观测向量,系统量测方程可以表示如下
Z(t)=H·X(t)+V(t)
(13)

3 自适应滤波计算
MEMS惯导系统精度低、重复性差,且容易受到实际使用环境的影响,误差特性会发生变化,从而影响了系统模型,造成系统特性表现出较强的非线性,导致传统的线性Kalman滤波对准方法难以取得较好的效果。为了解决非线性系统状态估计问题,常用的方法是扩展Kalman滤波器,它的缺点和局限性有两点:1)要求的噪声统计是已知的,然而在大多数应用问题中噪声统计是未知的,用错误的噪声统计设计扩展Kalman滤波器将使滤波器的误差增大,甚至使滤波器发散;2)扩展Kalman滤波器的原理是将非线性系统线性化,然后用线性系统常规Kalman滤波器解决非线性系统状态估计问题,其中忽略了由于非线性系统线性化引起的模型误差,从而引起滤波误差[18-20]。
为了解决上述矛盾,本文采用自适应抗差Kal-man滤波(Adaptive Robust Kalman Filtering,ARKF)来抑制炮弹飞行过程中的扰动以提高滤波器的滤波效果。在ARKF算法中,使用自适应因子调整滤波器参数,以检测并减少量测突变带来的随机误差。
(14)
自适应因子αi可以通过式(15)得到
αi=
(15)
(16)

(17)
当ARKF应用于MEMS惯导系统时,量测异常值将被隔离或者加权较少,以提高横滚角计算的准确性。
4 试验验证
通过车载模拟试验和弹道仿真试验,验证了上述算法的有效性。
车载试验MEMS惯导系统安装于小型双轴转台上,通过转台转动模拟制导弹药飞行过程中的角运动;转台安装于试验车上,通过车的行进来模拟弹体飞行的线运动,车载试验各设备连接关系如图2所示。
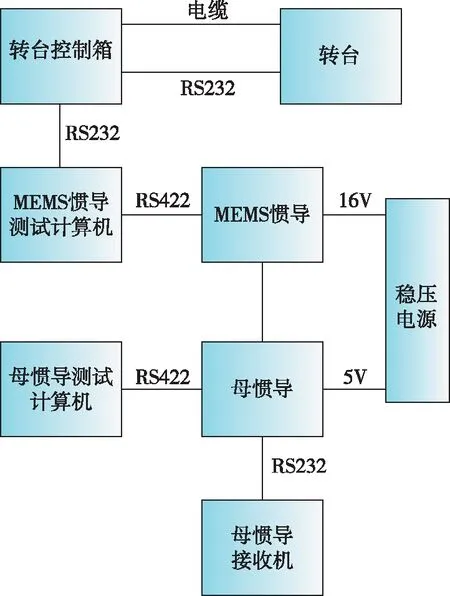
图2 车载试验设备连接关系Fig.2 Connection relationship of vehicle test equipment
MEMS惯导系统在车辆行进与旋转状态下进行姿态保持计算,将惯导Y轴垂直指向地面作为滚转角为0的点,设置转台转速为400(°)/s;关闭卫星接收机信号后,用母惯导及转台的输出得到导航过程中的姿态基准信息;采用自主误差抑制方法进行组合导航,并分别用常规Kalman滤波和文中提出的自适应扩展Kalman滤波进行对比分析。MEMS惯导系统的整个滤波过程时间为60s,可以得到整个滤波过程姿态误差如图3所示。
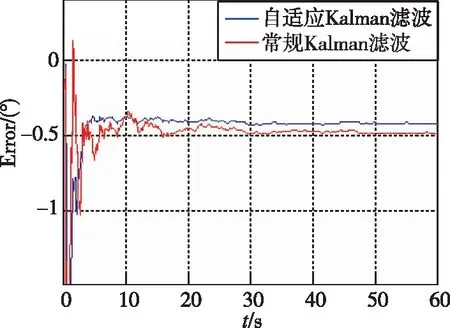
图3 滚动角误差Fig.3 Error of roll angle
从结果中能够看出,采用文中提出的卫星失效条件下的自主误差抑制方法,10s对准时间内,滚动角误差收敛到0.5°以内。基于自适应扩展Kalman滤波的对准结果和常规Kalman滤波相比,能够实现滚转角的快速收敛,并进一步提高滚动角的估计精度。
为了进一步验证算法的有效性,采用不同的弹道轨迹数据进行了8条次的弹道仿真验证,得到了基于自适应Kalman滤波的自主导航算法滚转角误差统计结果,如表2所示。
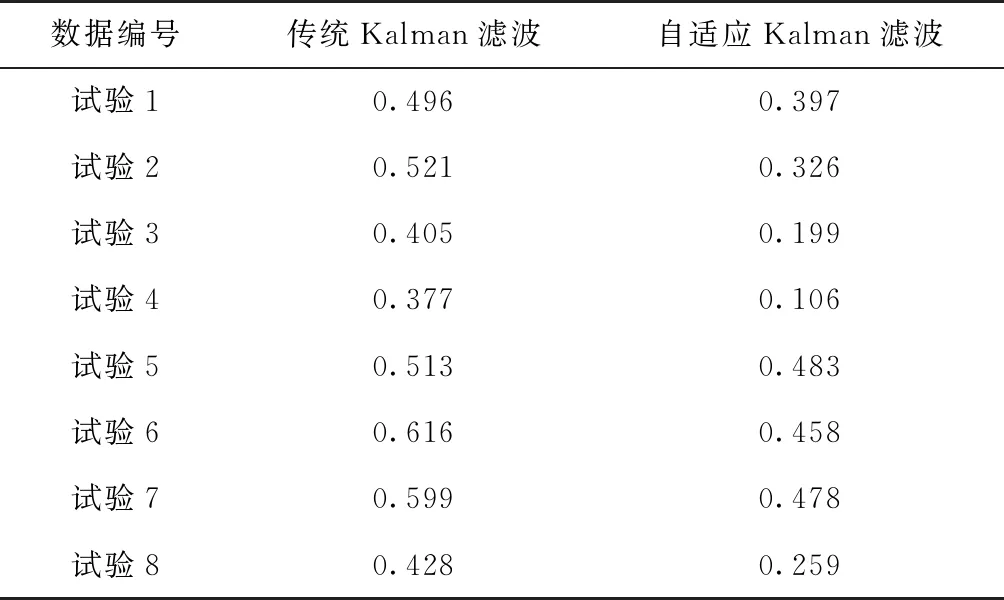
表2 弹道仿真滚转姿态误差统计
从统计结果中能够看出,基于自适应滤波的算法滤波效果更优,经8条次弹道仿真验证,滚转角误差均不超过0.5°,能够满足制导弹药的空中导航与控制精度的需求。
5 结论
本文针对制导弹药飞行过程中因卫星失锁导致滚转角误差大的问题,得到如下结论:
1)提出了一种基于自适应Kalman滤波的空中自主滚转角误差抑制算法。通过自适应Kalman滤波实现了对滚转角误差的精确估计与修正,相较于常规Kalman滤波算法具有明显的优越性。
2)车载模拟试验和弹道仿真结果表明,无卫星条件下,滚转角不会发散,误差小于0.5°。由分析可知,采用基于自适应Kalman滤波的空中自主滚转角误差抑制算法能够满足制导弹药空中导航与控制的滚转角精度需求,有效降低了制导弹药飞行过程中对卫星的依赖,提高了系统的自主性。
