基于SVR的导航传感器自适应野值检测方法
2020-09-22戴海发卞鸿巍王荣颖
戴海发,卞鸿巍,马 恒,王荣颖
(海军工程大学电气工程学院, 武汉 430033)
0 引言
综导系统是舰艇收集各导航传感器数据、进行集中处理并分发到各个用户的重要部件。舰载导航传感器的种类和数量较多,再加上海洋和电磁环境复杂多变,因此导航传感器的实际测量数据总是存在一些异常的值,这些异常测量值一般称为野值。如果不对这些野值进行处理,直接输入到综导系统的信息集成模块进行融合,就会影响信息融合的结果,甚至使融合结果完全不可信。因此,在信息融合之前对野值进行检测和处理具有相当重要的必要性。
在实际工程上,处理野值的方法主要有两种思路:一是利用外部传感器的辅助进行野值的检测。主要的方法有基于差值的3σ准则法、基于卡尔曼滤波器的χ2检验法[1-4]、基于小波分析的方法[5-6]等,其中3σ准则法需要基准数据,而χ2检验法依赖准确的系统噪声和测量噪声矩阵,基于小波分析的方法对渐变故障的检测效果不理想。上述方法最大的问题是都依赖稳定无野值的参考系统,如果参考系统也有可能产生野值,那么在检测到野值时,将无法判断具体是哪个系统发生了信息故障。
另一种思路是只利用传感器自身的历史测量值自主地判断野值。工程上比较常用的是差分技术、时间多项式外推法、ARMA模型预测法[7]、Lagrange插值法[8]等。差分技术利用前后时刻的值作差分,通过判断差分值是否合理来判断测量值是否为野值,该方法只对粗大的野值点有效。ARMA模型预测法通过历史数据训练ARMA模型用于预测当前测量值,但是要求测量数据满足平稳性条件。Lagrange插值法利用历史数据通过插值公式预测当前测量值,对于野值离散的野值点效果较好,但是对于野值连续的情况则效果不理想,有可能出现严重的失真现象。文献[9-10]提出了基于模糊系统的遥感数据野值检测方法,但是模糊规则的确定需要一定的技巧,限制了它的使用范围。
因此,本文提出了一种基于支持向量回归(Support Vector Regression, SVR)的导航传感器野值剔除方法。与Lagrange插值法相比,SVR可以自动地学习舰船的运动趋势,连续受野值点的影响较小,而且能够在没有其他传感器辅助的条件下完成野值检测。该方法的思路是利用在线训练好的模型预测当前的导航参数,如果测量值偏离预测值(残差)且超过一定限度,则认为测量值是异常值,并用预测值代替测量值;如果连续检测出异常值超过长T,则认为系统发生故障,除非故障被清除,否则不再使用该设备的信息。此外,传统的阈值一般是靠经验设定,而本文利用了历史残差数据计算出残差的统计量,然后利用3σ准则构建阈值。
本文首先介绍了SVR及算法的基本原理,然后推导了基于SVR的野值剔除方法,并通过实际海试数据验证了本文所提方法的有效性。
1 SVR原理及算法
利用支持向量机作回归分析的原理是通过非线性映射x→Φ(x),将多维非线性关系样本组x投影到高维特征空间G中变成线性关系,然后在这个高维特征空间中进行线性回归。给定n个数据样本{xi,yi},i=1,2,…,n,其中,xi为实际观测值,yi为期望值。采用式(1)来估计SVR的回归函数f[11]
y=f(x)=(ω,Φ(x))+b,
Φ∶Rn→G,ω∈G
(1)
式中,b为偏置量;ω为高维特征空间G中的矢量;Rn为n维实数空间。
如图1所示,SVR回归的目标是找到一个超平面使得到超平面最远的样本点距离最小,因此得到优化目标函数为
(2)
满足以下条件
(3)
上述优化模型可以看成一个二次规划问题,利用 Lagrange对偶形式,并引入核函数表达式,则式(2)可转化为
(4)

图1 SVR示意图Fig.1 Support vector regression diagram
其约束条件为
(5)

(6)
上述过程需满足KKT(Karush-Kuhn-Tucker)条件[12],即
(7)
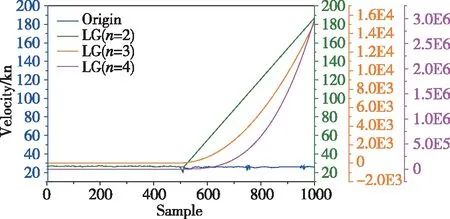
由式(7)可以看出,对任意一个样本(xi,yi)都有(C-αi)ξi=0,且αi(f(xi)-yi-ε-ξi)=0。于是,在得到αi后,若0<αi (8) 导航设备的当前导航参数与过去的导航参数具有相关性,理论上可以找到某个函数来表达这种关系,但是这种函数往往是高度非线性的,关于模型的阶次缺少先验知识,而且相关的自变量一般是多维的,传统的回归方法很难解决这类问题。此外,对于样本(x,y),传统回归模型通常直接基于模型输出f(x)与真实输出y之间的差别来计算损失,当且仅当f(x)与y完全相同时,损失才为零;与此不同,SVR假设能容忍f(x)与y之间最多有ε的偏差,即仅当f(x)与y之间的差值绝对值大于ε时才计算损失。正是由于这一特点,使得SVR避免了过拟合的问题[13]。因此,本文采用了SVR的方法来建立这样的函数关系。 对于导航传感器的输出时间序列{x1,x2,…,xt} ,如果根据xt的历史数据预测当前时刻的数据xt+1,则可以建立映射f∶Rm→R,满足[14] (9) 式中,m为预测函数中使用的历史数据的个数,即模型的阶次。 为了利用第1节的SVR算法来训练预测函数,需要采用窗口大小为N的滑动窗技术,并对k时刻存储的历史窗数据序列{xk-N,xk-N+1,…,xk-1}进行重构,将数据序列转化为矩阵形式,作为SVR的学习样本。构造的学习样本(X,Y)为 (10) 对SVR进行训练的回归函数为 (11) 其中,Xi表示矩阵X的第i行,Yt表示矩阵Y的第t行。本文选取的核函数为高斯径向基核函数,其表达式为 (12) 通过对样本的学习可以得到SVR的模型,从而得到当前时刻的预测值为 (13) 式中,Xk=[xk-m,xk-m+1,…,xk-1]。 计算预测值与实际测量值之间的差值 (14) 野值判定原则为 (15) (16) 进而确定阈值为 T=3σδx (17) 通常对于野值的处理都是直接剔除,然而这样会导致信息的缺失,不利于后续的信息融合。因此,本文选择重构的思路,具体的重构方法为当检测出测量值为野值时,利用SVR的预测结果代替测量值。 为了验证本文所提出算法的有效性,选取船舶的实测数据做实验,并与Lagrange插值法进行对比。实测数据是在某次航海试验中采集得到的数据,船上搭载的导航设备有惯导、卫导、电磁计程仪和天文导航系统等。海试的航行轨迹如图2所示。高斯径向基核函数的宽度参数取为σ=4;损失函数ε=0.01;滑动窗宽N=20;模型阶数m=5。本文所使用的算法是在开源代码库LibSVM的基础上进行修改实现的,使用的仿真平台为MATLAB。 图2 海试航行轨迹Fig.2 Sea trial sailing track 以电磁计程仪的速度信息为例(图3),原始测量数据中含有较多的野值点。取其中长度均为1000个样本的2段数据进行分析,其中一段只含有少量离散的野值点,另一段含有几处连续的野值点,分别利用Lagrange插值和SVR的方法对数据进行野值处理。 图3 电磁计程仪原始数据Fig.3 Electromagnetic log raw data 1)场景1 在场景1中,样本中的速度测量值含有少量离散的点,且速度保持在基本平稳的状态下,Lagrange插值法的插值点数设为n=2,得到的结果如图4所示。 图4 场景1不同野值处理方法结果对比Fig.4 Comparison of different outliers processing methods in scenario 1 从图4中可以看出,在该场景中Lagrange插值法和SVR算法都能够有效地去除离散的野值点,而且SVR算法对波动值的估计值更加平滑。从表1可以看出,SVR算法的计算时间比Lagrange插值法只多了11ms,但是检测成功率提高了8%。这表明SVR算法建立的预测模型比较准确,在一定程度上能够抑制噪声的影响。 表1 不同检测方法的性能对比 2)场景2 如图5所示,场景2中,舰船运动状态不稳定,存在加速和减速运动,速度的测量值存在3处连续的野值群(如图6中蓝色虚线椭圆所标示)。此时,不能够确定Lagrange插值法的插值点数,因此分别设定了几种插值点方案,得到的结果与真实测量值的对比如图5所示。图6展示了使用本文所提出的方法估计的结果与真实测量值的对比情况。 图5 场景2 Lagrange插值结果Fig.5 Lagrange interpolation results in scenario 2 图6 场景2 SVR结果Fig.6 SVR results in scenario 2 从图5可以看出,利用Lagrange插值法得到的结果刚开始与实际测量值比较接近,说明该方法能够剔除少数离散的野值点;但是从第500个数据点开始,估计值逐渐偏离真实值,而且随着插值点数量n的增加,偏离得越激烈。这是因为此时出现了较多连续的野值点,而Lagrange插值法会将误差逐渐累积,插值点个数越高,模型的阶次越高,误差膨胀得越快。在1000s时,速度误差分别达到160m/s、1.6×104m/s、3×106m/s,已经完全失去了修正功能,这说明任意插值点数的Lagrange插值法无法检测出连续的野值点。 从图6可以看出,蓝色椭圆虚线标示出的3处连续的野值已经被基于SVR的方法有效剔除,得到的结果与真实测量值比较吻合,而且平滑性较好,较好地反映了舰船的真实运动速度。这表明基于SVR的方法对于导航传感器连续野值点的情况具有较好的抑制作用。表2展示了不同野值检测方法在场景2下的计算时间和检测成功率,从表2中可以看出,SVR算法在该场景下依然具有较少的计算时间和较高的检测成功率。 表2 不同检测方法的性能对比 针对Lagrange插值法无法处理连续野值的问题,本文提出了一种基于改进SVR的导航传感器自适应野值检测方法。该方法结合了SVR只需要小样本数据就能够准确建模和3σ准则计算简易的优点,利用SVR在线建立舰船的运动模型对测量值进行实时预测,并利用3σ准则自适应地计算阈值;然后通过比较阈值与预测残差来判别测量值是否为野值点,如果测量值被检测为野值点,则用SVR的预测值替代该野值点。海试实测数据表明,本文提出的方法能够在存在连续野值点的情况下检测出野值点,同时得到较好的传感器真实测量值的估计,而且算法简单容易实现,具有较好的工程应用价值。2 基于SVR的野值剔除方法




3 试验与分析






4 结论
