基于线性霍尔传感器的液体黏度测量实验仪
2020-09-18王学水祝志浩李志涛马亚楠
王学水,姜 浩,祝志浩,李志涛,马亚楠
(山东科技大学 电子信息工程学院,山东 青岛 266590)
落球法通过测量下落小球的终极速度计算液体黏度[1],传统的实验仪器通过人工秒表计时,存在视觉误差与反应误差. 张海林等利用CCD工业摄像机对落球法进行改进[2],黄秋萍利用光电门进行改进[3],这2种方法都不能测量非透明液体. 王本阳等利用集成霍尔开关式传感器进行改进[4],虽然解决了非透明液体的黏度测量问题,但磁性小球提供的磁场到达定值后,传感器会持续输出高电平,影响测量精度.
本文利用线性霍尔传感器实时输出模拟霍尔电压信号,通过对霍尔信号采集、处理和分析计算出实验小球的终极速度. 该方法解决了传统落球法不能测量非透明液体黏度问题,同时还提高了测量精度,并且拓宽可测量液体黏度的范围,符合目前黏度测量仪对于传统测量方法改进的要求,使其智能化. 该方向还加强了学科间交叉渗透,拓宽了学生视野,丰富了实验内容,提高了学生实验的积极性.
1 基本原理及测量仪器
如图1所示,磁性小球由圆柱筒顶部下落到底部过程中,在经过传感器正中间时,传感器输出的霍尔电压为最大值或最小值. 因此实验结束时,每个传感器都会输出具有峰值的波形信号. 若传感器等间距分布,通过实验仪得出每个峰值产生的时间,可判断小球的运动状态并求出终极速度,求得液体的黏度.

图1 液体黏度测量仪系统框图
黏度测量仪由5部分组成:
1)实验仪主体部分,该部分为传统落球法实验仪器.
2)传感器及信号调理部分,将传感器A,B,C和D以10 cm间隔由上至下焊接在电路板上. 传感器采用恒流源供电方式,保证输出信号的变化只与小球作用的磁场变化有关. 信号调理电路用于放大霍尔信号,并转换为可被微控制器采集的单端电压.
3)电源部分,为微控制器提供3.3 V工作电压,为恒流源电路提供+12 V工作电压,为信号调理电路提供±15 V工作电压.
4)下位机部分,使用微控制器内部12位A/D转换器采集霍尔信号,转换精度高,转换速率快,最快为1 μs. 使用内部定时器计时,时钟频率为72 MHz,计时准确. 在每次对霍尔信号转换完成后,将信号与时间数据上传到计算机.
5)上位机部分,LabVIEW程序接收和保存下位机发送的数据,并根据数据实时显示霍尔信号波形图. 利用Matlab拟合数据,得到每个传感器输出的霍尔信号达到峰值时所对应的时间.
实验时将磁性小球固定在铁制拉杆中央,套在圆柱筒上. 调整圆柱筒竖直放置,霍尔传感器电路板也竖直固定在圆柱筒上. 然后接通电源,上位机运行LabVIEW程序,配置串口通信参量,设置数据文件保存位置. 在配置完成后,点击运行界面的开始按钮,将铁制拉杆向上拔起,使小球下落. 待小球下落完成后,点击运行界面的停止按钮,完成实验.
2 技术实现方法
2.1 元器件选型
HG-302C线性霍尔传感器具有很好的线性度,温度性能稳定,现已作为霍尔效应实验中使用的THS119线性霍尔元件的替代元件.
磁性小球选择N35烧结钕铁硼磁铁,其具有非常优异的磁特性,充磁方向分为轴向与径向,可排除小球下落过程因自身翻转带来的实验误差.
2.2 恒流源及信号调理电路
图2为由运放LM324和三极管构成的压控恒流源电路[5],组态为电流串联负反馈. 调节R15阻值,可实现0~10 mA恒流变化.

图2 恒流源电路
在实际测量中发现,磁性小球下落过程使传感器输出的霍尔信号在0~1 mV内变动. 微控制器不能采集微弱的信号,因此设计了由3个OP07构成的仪用放大电路[6]. 如图3所示,第1级用于信号放大及提高共模抑制比,并且可以改变Rw=R20+R21阻值调节放大倍数;第2级放大用于电压跟随,双端输入转单端输出,其输入与输出电压关系为
(1)

图3 霍尔信号放大电路
实验时小球对传感器施加的磁场方向不同,因此传感器会输出正负霍尔电压,经过放大之后,微控制器不能采集负电压,因此设计了升压电路. 如图4所示,该电路为同相输入求和电路,输入与输出电压关系为
VADC≈0.4(V分+Vout),
(2)
其中V分为电阻R30的分压.
升压电路将霍尔信号提升了约1.5 V,微控制器电压采集范围为0~3.3 V,所以霍尔信号的放大范围为0~1.5 V. 由于未对传感器存在的不等位电势进行补偿,所以信号放大倍数选为偏小的100倍.

图4 霍尔信号升压电路
2.3 微控制器软件工作流程
微控制器工作流程如图5所示,先对串口通信参量、内部DMA通道参量等进行配置,并启动A/D转换. 在实验开始时,通过上位机发送字符1,微控制器启动定时器开始计时,读取并计算A/D转换值,然后发送数据. 延时5 ms,实现每5 ms采集1次霍尔信号. 上位机发送字符2,关闭定时器并停止发送数据,结束本次实验. 上位机发送字符3,重置计时时间,可重新开始实验. 这样设计的目的为实验时只需在上位机进行操作即可,简化实验步骤.

图5 微控制器工作流程
3 实验数据测量及处理
待测液体为蓖麻油,室温为17.5 ℃. 直接测量量测6次,液体的密度ρ0=(0.959±0.002)×103kg/m3,液面高度H=(596.8±0.5) mm,筒内直径D=(29.47±0.12) mm,磁力小球直径d=(7.993±0.004) mm,小球密度ρ=(7.497±0.002)×103kg/m3.
点击LabVIEW面板上的开始、停止、复位按钮,对应向微控制器发送字符1,2,3,实现对下位机的控制. 实验过程中波形图控件会实时绘制每个传感器产生的电压信号,使实验现象非常明显. 其波形显示如图6所示,图中红、绿、蓝、粉曲线分别代表霍尔传感器A,B,C和D输出的霍尔电压信号.
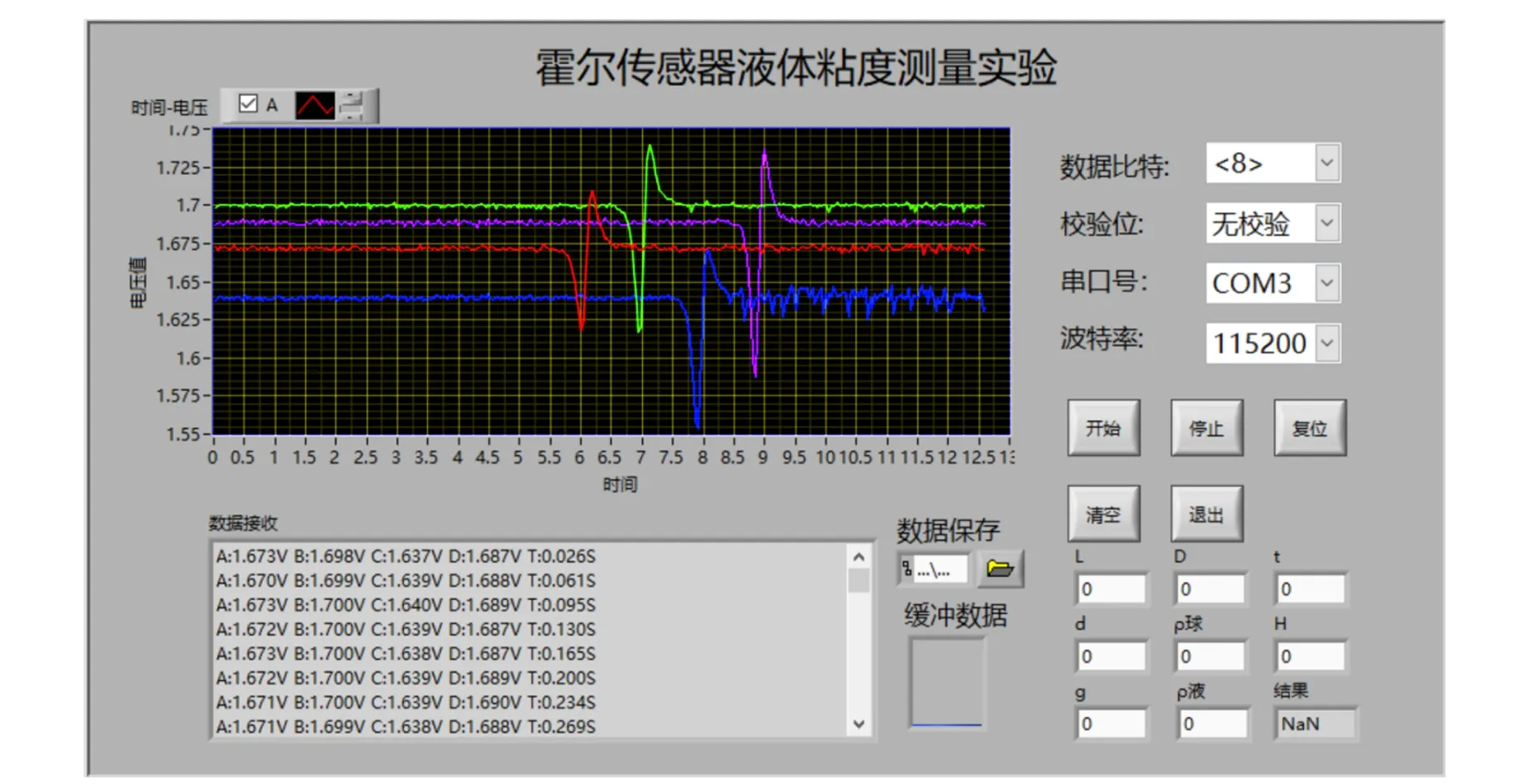
图6 LabVIEW程序前面板
通过Matlab对保存的实验数据进行曲线拟合,得到霍尔信号峰值所对应的时间. 拟合结果如图7所示.

图7 Matlab数据拟合
重复6次实验,得到小球经过每个传感器所用时间如表1所示. 可以看出小球经过每个传感器的时间基本一致,可以判定小球处于匀速运动状态,取经过传感器A和D的时间计算小球的终极速度.tAD测量均值为2.907 s.
将数据代入黏度测量公式并做二级修正,

(3)
计算所得蓖麻油黏度值为η=1.19 Pa·s. 计算黏度测量不确定度[7]为μC(η)= 0.01 Pa·s,最终测得的蓖麻油黏度为η=(1.19±0.01) Pa·s. 实际环境下蓖麻油的黏度值为1.23 Pa·s,本实验仪测量结果与其相比较,测量偏差为3.3%.
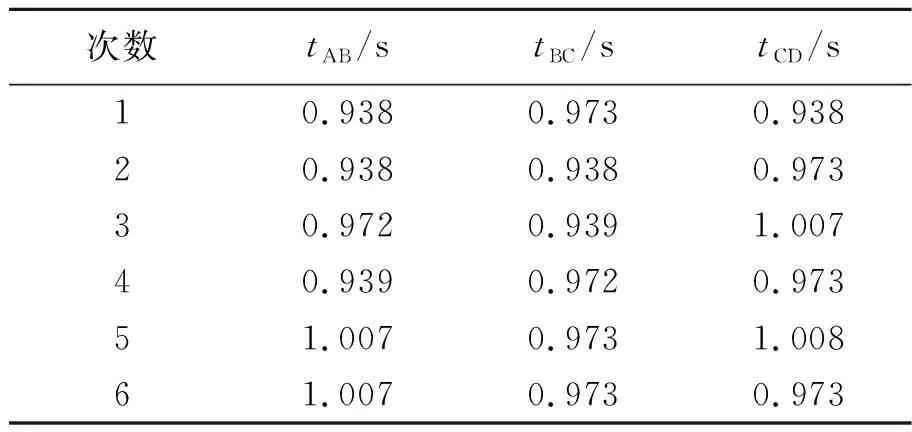
表1 小球经过各传感器所用时间
4 结束语
从实验过程可以看出,该实验仪器并没有增加操作难度,在实验时只需点击上位机界面的开始和停止按钮便可以进行实验,完成对实验数据的记录,实验操作方便. 对测量仪器进行重复性实验,测量数据稳定. 本文对于传统落球法的改进,是对其添加硬件电路,这样可以很方便地对传统测量仪器进行升级改进.