基于HOSMO的风电机组自适应超扭曲滑模控制
2020-09-16郝万君郝诗源曹松青孙志辉
王 昊,郝万君,郝诗源,曹松青,孙志辉
1)苏州科技大学电子与信息工程学院,江苏苏州215009;2)丹麦科技大学电气工程系,丹麦哥本哈根999017
在风电机组的低风速区,风机的主要控制目标是获得最大的风能利用效率,即最大功率跟踪控制.随着大型风力发电系统的不断发展,其系统具有更复杂的特性,并产生各种不确定扰动的问题.这使得经典的最大功率跟踪控制方法难以实现最大功率跟踪控制,进而无法很好地实现最大风能捕获,造成了风能的浪费.为了解决这些问题,许多学者针对强耦合、强非线性的复杂风机系统设计了各种各样的非线性控制方法[1-2].文献[3]将积分滑模控制用于低风速区实现最大风能捕获,以消除稳态误差,提高鲁棒性,但未讨论滑模控制固有的抖动性.文献[4]提出了一种二阶滑模观测器与电机系统中电流模型相结合的方法,利用滑模观测器设计转速控制的自适应律,得到了理想的转速控制效果,但是该方法针对系统状态难以获取的复杂非线性系统有一定的应用局限性.文献[5]提出用二阶滑模控制、直接转矩控制和模糊逻辑控制相结合的方法去解决抖振问题.然而,由于系统的强非线性使得该控制策略很难保证系统有较强的鲁棒性,无法很好地解决外界干扰和参数扰动的问题.文献[6]提出了模糊调谐比例积分(proportional-integral, PI)的直接转矩控制策略.这种技术的主要难点是确定输入增益,而输入增益决定了控制性能的好坏.文献[7]为了使电磁转矩和定子无功功率不受电网电压扰动的影响采用了滑模控制方法,提高了系统对参数变化的鲁棒性,加快了动态响应速度.在文献[8]中,使用超扭曲滑模控制策略来避免出现不稳定的抖振问题,采用了尽可能低的增益常数,但这会大大增加系统的响应时间.
滑模控制策略具有强鲁棒性、抗干扰能力强和对扰动不敏感等特点.但其主要问题是由于控制的不连续而产生的抖振问题.为了改进现有的转矩控制器,减少无功功率和有功功率的抖振现象,针对上述问题本研究设计了基于高阶滑模观测器(high order sliding mode observer, HOSMO)的自适应超扭曲滑模控制策略.超扭曲滑模控制器有效提高了系统的跟踪性能,利用所设计的自适应律增强了系统对未知参数和外界扰动的鲁棒性.高阶滑模观测器对系统状态进行估计,进而减小由于系统高频离散控制带来的高频噪音信号,改善了系统的鲁棒性和抗干扰性.从阶跃突变风速仿真和连续渐变风速仿真结果可以看出,设计的HOSMO能够很好地估计系统状态,自适应超扭曲滑模控制可有效消除系统抖振,在存在外界扰动时能很好地实现系统的最大功率跟踪控制.
1 风力发电机组模型
1.1 空气动力系统模型
风轮机捕获的有效风功率Pr为
Pr=0.5πR2V2Cp(β,λ)
(1)
其中,R是风轮转子半径;V为随机风速;Cp(β,λ)为风机功率转换效率;β为桨距角;叶尖速比λ为
λ=(ωrR)/V
(2)
风轮转子的机械转矩Ta为
(3)
其中,ωr为风轮转子转速;ρ是空气密度;风能利用系数Cp可按式(4)[9]计算,
(4)
其中,αi为近似系数,i=1, 2, …,n.通常n=5时可取得较高精度,α0=0.166 7,α1=-0.255 8,α2=0.115,α3=-1.617×10-2,α4=9.5×10-4,α5=-2.05×10-5.
1.2 传动系统模型
传动系统模型由高速轴、低速轴和齿轮箱组成.在忽略系统刚性轴的扭转系数和阻尼系数后,可简化为一个单质量块模型,其数学模型[10]为
(5)

1.3 风力发电机模型
本研究采用双馈异步发电机,为简便起见,可将其电磁部分简化为一个一阶线性模型[10],
(6)
其中,τg为转矩系数;Tg,ref为发电机转矩给定值.
2 控制器的设计
2.1 系统控制目标
最大功率跟踪控制是在低风速段捕获最大风能的方法,可根据风速的变化、风轮的机械特性和叶尖速比的最优值确定.当桨距角取一些特定值时,就可绘出风能利用系数Cp作为λ的函数,如图1.由式(1)可知,在风速一定时,风机捕获的Pr取决于Cp.根据式(2)和图1可知,在低风速区只需调节转子转速,使其跟踪最佳转子转速,即可得最佳叶尖速比λopt,获得最大风能利用系数Cp,max.由图1可知,当β=0°,λ=λopt=8.13 时,Cp取得最大值[11].

图1 风力机Cp-λ曲线
2.2 一阶滑模控制器与比例积分控制器
传统的一阶滑模控制方法最能显示滑模控制方法的优势,主要表现在控制上的不连续性、强鲁棒性和对参数不敏感等.同时,也能表现出滑模控制特有的抖动问题.因为一阶滑模控制器和比例积分控制设计方法相对简单,所以这里直接给出一阶滑模控制器形式和比例积分控制器形式,方便后续的对比分析实验.
首先,选取角速度跟踪误差e为
e=ωr-ωref
(7)
其中,ωref为参考角速度.则PI控制器形式为
(8)
一阶滑模控制器形式为
(9)
其中,α为一阶滑模控制器参数,α=1;k为指数趋近律参数.
2.3 自适应超扭曲滑模控制器的设计
2.3.1 滑模面的定义
根据上述控制目标可知,风电机组低风速的控制目标是ωr实时跟踪参考角速度ωref.令风轮转子转动角度跟踪误差x1=θr-θref,风轮转子角速度跟踪误差x2=e=ωr-ωref.则由式(5)可知系统模型为
(10)

s(t)=cx1+x2
(11)
其中,c为滑模面的待设计参数,满足c>0.
2.3.2 控制器设计
超扭曲滑模控制策略是高阶滑模控制的一种,不仅能保证趋近滑模面的可达性,还考虑了高阶导数的稳定性,所以能有效地抑制抖动.
(12)
(13)
联合式(10)、(12)和(13)可得出风电系统的等效控制ueq,
(14)
切换控制usw由连续状态函数和带有积分器的不连续输入u1(t)组成,
(15)
(16)
其中,L和W是相应的控制增益,使得系统在有限时间内收敛,具有良好的鲁棒性.因为标准的超扭曲滑模的增益很容易受边界干扰的影响,很难补偿系统的不确定性,因此,引入了自适应,允许自动确定增益.
2.3.3 自适应律设计
针对式(15)和式(16)超扭曲控制中的参数L和W,设计自适应律为
(17)

3 高阶滑模观测器的设计
在系统控制器的设计中,不仅用到了状态变量x2,还涉及到其导数的形式.从2.3节可知,滑模面的导数以及控制律中都含有x2导数的信息,对x2导数测量会有高频噪声产生.直接引入该信号会在系统中产生高频抖动.为了避免这个问题,设计HOSMO为
(18)

(19)
(20)

(21)
其中,τ为0~t时间内的取值,满足0≤τ≤t.
综上,具有HOSMO的超扭曲滑模控制器可为
(22)
采用基于HOSMO的自适应超扭曲滑模控制,大大提高了滑动面的收敛精度.使状态变量更接近平衡点.由式(10)、式(12)、式(14)—式(19)和式(22)可得最大功率跟踪控制系统结构如图2.
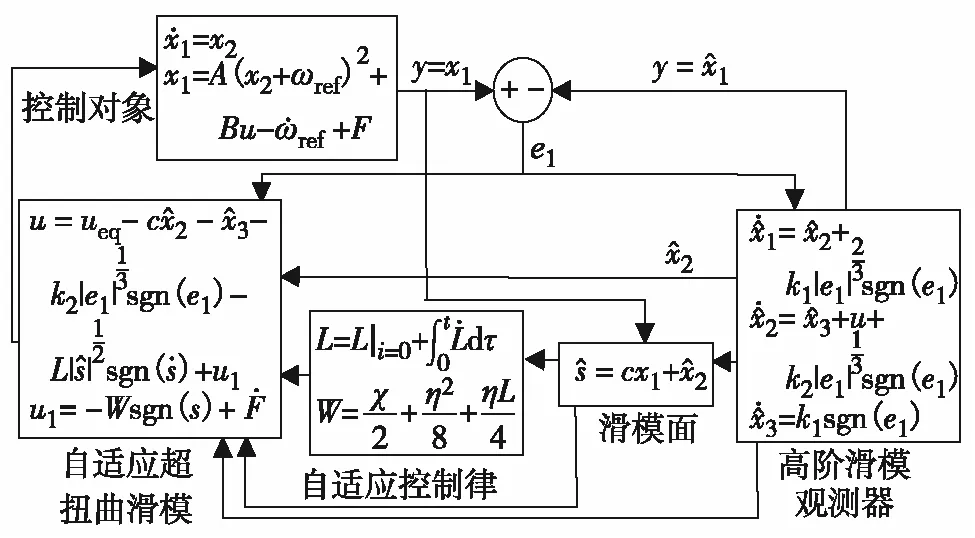
图2 风机控制系统结构图
4 仿真及结果分析
为验证所提控制策略对风电机组的最大功率跟踪控制性能,本研究以美国国家可再生能源实验室(National Renewable Energy Laboratory, NREL)开发的功率为5 MW的风电机组为研究对象,具体参数为:Ng=97;Jr=59 157×107kg·m2;Jg=534.116 kg·m2;风轮直径D=129 m;空气密度ρ=1.225 kg/m3;发电机转矩系数τg=0.1.

为证明所提控制策略的合理性和可行性,采取阶跃突变风速仿真和模拟自然随机风速仿真2种方案,验证PI、一阶滑模和自适应超扭曲滑模3种控制策略的控制性能.
4.1 阶跃突变风速仿真
阶跃突变风速为v=4δ(t)+4δ(t-200).图3为阶跃突变风速下,Cp、λ和ωr的响应曲线.
从图3(a)和(b)中可见,3种控制策略都能得到较好的Cp和λ,满足系统基本要求.从图3(c)可见,3种方法均能使风轮转子转速快速地跟踪风力机的最优转速,但在t=200 s风速突变到8 m/s 时,PI控制以及一阶滑模控制有较大的超调,而自适应超扭曲滑模控制没有超调,只是上升时间相对较长,对于风电机组转速的改变就有相对多的时间,所以减少了所受机械应力,使风电机组运行更加安全.
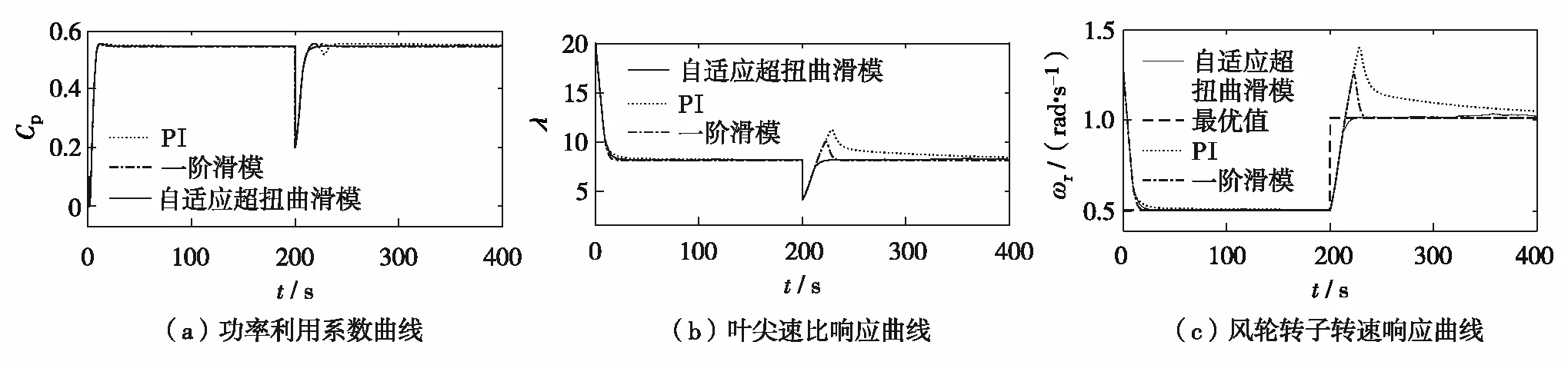
图3 阶跃突变风速下的响应曲线
4.2 连续渐变风速仿真
为使仿真更接近实际,选择如图4的自然随机风速进行仿真,时间设定为400 s,风速设定为3.58~11.12 m/s.图5为随机风速下,Cp、λ和ωr的仿真实验图.
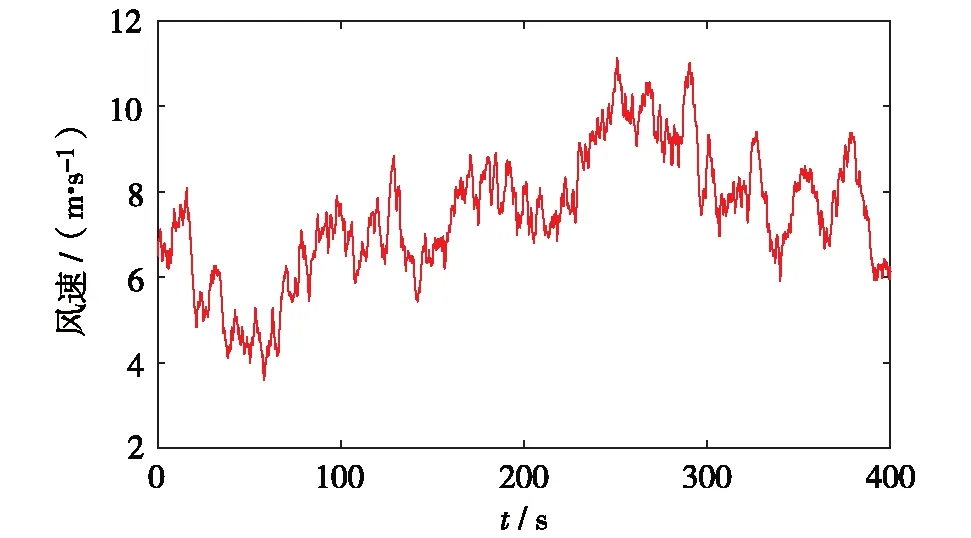
图4 连续风速曲线
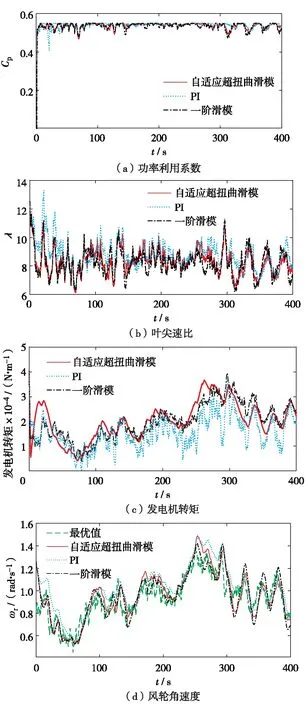
图5 连续风速下风机仿真曲线
由图5可知,当风速为3.58~11.12 m/s时,3种方法均能得到较好的Cp和λ.其中,从图5(b)可计算出超扭曲滑模、比例积分和一阶滑模的平均λ分别为8.325、8.789和8.452,所以在风速随机变换时,超扭曲滑模控制能使系统很好地维持在最佳λ值(8.13左右).为更好地对比3种控制策略的性能,分别计算其跟踪误差绝对值的平均值AVG(|e|)、基功率利用系数平均值AVG(Cp)以及转矩的标准差STD(Tg).如表1.
从表1可见,无论是AVG(|e|)还是AVG(Cp)都比其他两种控制策略好.从表1可知,3种控制策略的AVG(|e|)分别为0.068 49、0.097 85和0.079 64(由图5(d)计算可得),因此,所提控制策略能实现很好误差跟踪效果.3种控制策略的功率系数如图5(a),超扭曲滑模、比例积分、一阶滑模的AVG(Cp)分别为5.535 9、0.518 4和0.533 8,可知,超扭曲滑模控制策略平均功率系数比使用积分时提高了3.38%,比使用一阶滑模时提高了2.31%.图5(c)为发电机转矩曲线,由表1可知,超扭曲滑模控制相对于一阶滑模控制使得发电机的STD(Tg)减小了15.21%,说明了所提方法能很好地消除常规滑模控制方法的抖振.
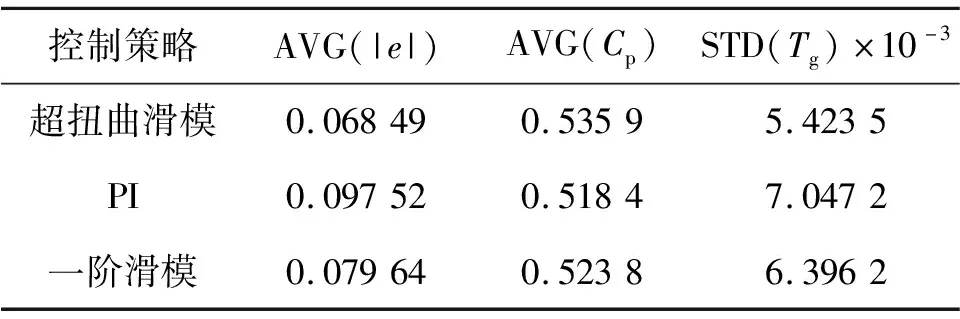
表1 三种方法的控制性能对比
HOSMO估计的状态变量效果如图6.由图6(a)可知,设计的HOSMO能实时观测估计出状态变量x2的值,其误差稳定在±0.1,表明了观测器有较高的观测精度.进而实现自适应超扭曲滑模控制的精确计算.从图6(b)可见,具有HOSMO的自适应超扭曲滑模面s具有很小的抖振性.能更好的达到控制要求.
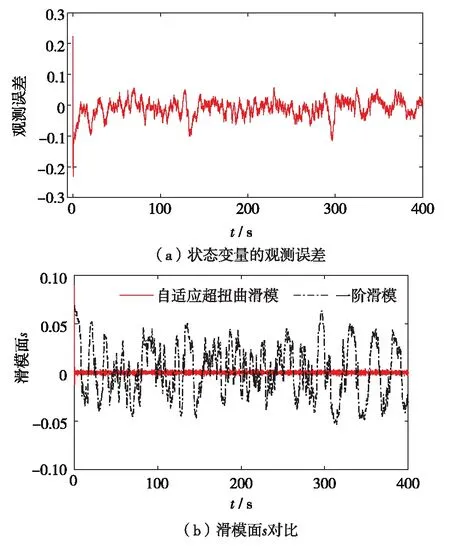
图6 高阶滑模观测器估计效果图
结 语
为提高大惯量风力发电机组的能量转换效率,抑制发电机转矩抖振,同时考虑风电机组不确定性和外界干扰.设计了基于高阶滑模观测器的自适应超扭曲滑模控制策略.从仿真结果可以看出,所提控制策略解决了系统部分状态变量难以获取的问题,且避免了直接测量引入高频噪声的问题,利用自适应超扭曲算法消除了系统的抖振.增强了系统对不确定参数以及外界扰动的鲁棒性.研究发现,在降低驱动链条瞬态负载的情况下,所提方法在适应风速随机变化、最优功率捕获、抑制转矩抖振和减少风力机载荷等方面优于常规的控制方法.