智能车辆轨迹跟踪控制方法研究
2020-09-16唐传茵赵懿峰赵亚峰周淑文
唐传茵, 赵懿峰, 赵亚峰, 周淑文
(1. 东北大学 机械工程与自动化学院, 辽宁 沈阳 110819; 2. 上海赛科利汽车模具技术应用有限公司, 上海 201209)
智能化汽车的概念逐渐被越来越多的人所熟知,与之相关的技术也开始普遍应用.智能车辆可以自动完成一些基本的驾驶操作行为,从而可以避免人为因素引起的交通事故,不仅交通事故率可以大大降低,而且道路拥堵问题也能得到有效缓解.智能车辆的研究领域非常广阔,是一个由计算机技术、人工智能、控制工程、电子通信等多个学科和前沿技术所组成的综合体.轨迹跟踪控制技术作为智能车辆的关键技术之一,通过控制智能车辆的驱动系统与制动系统,使车辆按照规划好的路径行驶,并且保证乘客的舒适性和车辆的稳定性.
国内外的许多高校和科研院所采用不同的控制方法对轨迹跟踪控制进行了研究[1-6].车辆系统具有多变量的特点,系统的动态特征难以用传统的控制方法进行描述,学者们用模糊控制方法来控制智能车辆的轨迹跟踪问题[7].模糊控制算法在高速下的路径跟踪效果稍差.为了提高路径跟踪效果和便于处理约束问题,模型预测控制越来越受到人们的重视.文献[8]设计了基于车辆运动学模型的预测控制算法,该算法通过建立基于横向位置与航向角偏差的反馈模糊控制器对路径进行跟踪,但该方法在高速工况下误差偏大.对于模型预测控制算法来说,选择合适的预测时域与控制时域是很重要的.通常这两个控制参数主要依靠经验进行人工调整选择,这样做不仅费时费力,而且不一定能保证模型预测控制器的路径跟踪效果最优.
本文针对提高智能车辆不同工况和不同速度下的路径跟踪效果,研究了模糊控制器、模型预测控制器在智能车辆的轨迹跟踪控制中的作用.并且在此基础上,利用PSO算法研究了预测时域与控制时域在模型预测控制器中的参数优化问题,分析了预测输出及控制输入步长对系统动态优化结果的影响.提出了一种可以调节参数的智能车辆轨迹跟踪控制方法,并进行了相应的理论分析与仿真实验工作.
1 车辆动力学模型
建立如图1所示的车辆四轮简化动力学模型.其中XOY为大地参考坐标系,xoy为车体参考坐标系.a为质心到前轴的距离,b为质心到后轴的距离,c为前后轮半轮距,ω为横摆角速度,β为质心侧偏角,α为轮胎侧偏角,V为车辆的行驶速度,u为纵向车速,v为侧向车速.Fcf1,Fcf2为前轮左右两个轮胎所受的侧偏力,Fcr1,Fcr2为后轮左右两个轮胎所受的侧偏力;Flf1,Flf2为前轮左右两个轮胎所受的纵向力,Flr1,Flr2为后轮左右两个轮胎所受的纵向力;Fxf1,Fxf2为前轮左右两个轮胎所受的x方向力,Fxr1,Fxr2为后轮左右两个轮胎所受的x方向力;Fyf1,Fyf2为前轮左右两个轮胎所受的y方向力,Fyr1,Fyr2为后轮左右两个轮胎所受的y方向力.
车辆动力学的非线性模型为
(1)
式中:X,Y表示车辆以大地坐标系作为参考系的坐标;φ为车辆的航向角;α为轮胎的侧偏角;cf为前轮纵向刚度;cr为后轮纵向刚度;sf为前轮滑移率;sr为后轮滑移率;δ为前轮转角.
将式(1)表示成状态方程的形式,
(2)
输入变量u=δ.
2 智能车辆模糊控制器
2.1 模糊控制
设计模糊控制器,以横向偏差和航向偏差作为控制器的输入量,前轮转角作为控制器的输出量;对车辆在高、中、低三种不同速度下的路径跟踪能力进行仿真验证.工况选择双移线工况和换道工况. 规定车辆位于道路中心线右侧时,横向偏差为正,反之为负;航向偏差顺时针为正,逆时针为负;前轮转角右转为正,左转为负.依据上述原则和人工经验,并结合实际的仿真效果不断进行调整,最终确定的模糊控制规则表如表1所示.
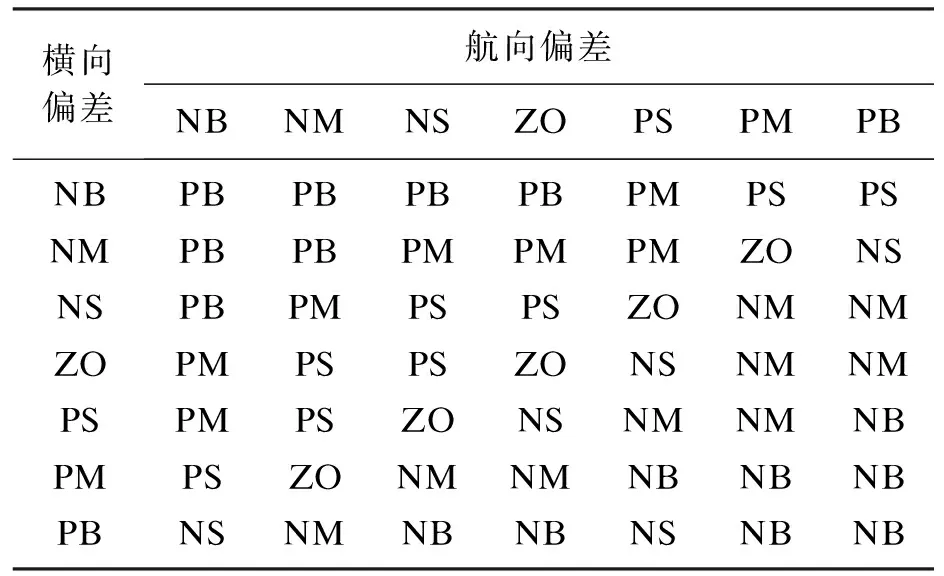
表1 模糊控制规则表Table 1 Regulation table of fuzzy control
2.2 仿真分析
不同速度下双移线工况与换道工况的仿真结果如图2和图3所示.
从图2与图3可以看出,当车辆以高、中、低三种速度对路径进行跟踪时,随着速度的增加横向偏差逐渐增大,最大偏差出现在弯道处.当车辆以中低速度行驶时,在模糊控制器的作用下可以较好地完成对目标路径的跟踪,具有较高的跟踪精度;当车辆以较高速度行驶时,横向偏差明显增大,导致路径跟踪效果稍差.
细分现有的国别市场了解不同国别市场的消费者需求,根据种族、年龄、收入水平、消费特征,对图书产品进行开发与定位,扩大市场潜力。
3 智能车辆模型预测控制器
假设参考车辆能够完全通过参考轨迹,并且满足建立的动力学模型,由此可以得到每个时刻所需的状态量ξm与控制量um,且满足如下关系:
um=δm.
为了保证车辆具有良好的行驶稳定性,对控制量和控制增量及车辆的动力学参数进行约束.分别对前轮转角及其增量、轮胎侧偏角、质心侧偏角、地面附着条件这4个量进行约束.
1) 控制量及其增量约束.约束设置为
-10°≤δ≤10°,
-0.8°≤Δδ≤0.8°.
2) 轮胎侧偏角约束.约束设置为
-3°≤α≤3°.
3) 质心侧偏角约束.约束设置为
-12°≤β≤12°,(高附着路面);
-2°≤β≤2°,(低附着路面).

在每个周期内系统对上述优化问题进行求解得到控制时域内控制增量序列,最优控制序列如下:
4 模型预测控制器仿真分析
分析双移线工况与换道工况下的控制器仿真效果,选择高、中、低三种车速进行仿真验证.设置速度v分别为10,15,20 m/s,路面附着系数μ=0.8.
为了验证模型预测控制器对速度的鲁棒性,分析车辆以不同速度行驶时的控制效果,将不同速度下的仿真结果进行对比.图4~图6包括两种工况,双移线工况和换道工况.图4为两种工况下,车辆实际行驶轨迹与参考轨迹的对比图,其中图4a为双移线工况,图4b为换道工况,图中横轴表示纵向位移.图5为两种工况下,前轮转角对比图;图6为两种工况下,轮胎侧偏角随时间变化的曲线图.图5,图6中低速、中速、较高车速分别用实线、虚线、点划线表示,横轴为时间.
由图4可知,在模型预测控制器的作用下,车辆在中、低速度下能对目标路径进行较好地跟踪,仅在弯道部分车辆的实际行驶轨迹与参考轨迹存在偏差;当车辆以较高的车速行驶时,横向偏差有所增大,但在模型预测控制器的作用下最终将偏差收敛为0,说明车辆在不同速度下都具有较好的跟踪效果.由图5可知,随着车速的增加,前轮转角变化的位置也向前移动,并且变化的范围也逐渐增大,总体变化范围为-4° ~ 2.5°,始终处在约束范围内,并且变化平稳,没有明显的抖动,可以确保被执行机构顺利执行.从图6可看出,轮胎侧偏角随着车速的增加逐渐增大,总体的变化范围为-1.4° ~ 2.4°,始终处在约束范围,保证了车辆在轨迹跟踪过程中具有较好的侧向稳定性.
5 基于PSO优化算法的模型预测控制器
搭建Carsim与Simulink联合仿真平台.利用PSO算法对不同速度下模型预测控制器的控制参数预测时域和控制时域进行优化.PSO算法和联合仿真平台之间通过粒子(MPC中的参数Np,Nc)和该粒子所对应的适应度值(控制系统的性能指标)建立联系.
5.1 参数优化分析
5.1.1 双移线工况
利用PSO算法对双移线工况下不同速度的模型预测控制器中的控制参数进行优化,优化后的结果如图7所示.其中,图7a,图7b分别为车速为低速时的性能指标IAE与预测时域Np、控制时域Nc的变化曲线.图7c~图7f分别为车速为中速、高速时的性能指标IAE与参数值Np,Nc的变化曲线.
从图7可以看出,低速时的性能指标IAE的变化曲线经过3次迭代趋于稳定,并达到最小值,最小值为0.458 5;参数Np的最优值为15.395 3,参数Nc的最优值为4.234 9.中速时的性能指标IAE的变化曲线经过6次迭代趋于稳定,并达到最小值,最小值为0.872 4;参数Np的最优值为20.523 7,参数Nc的最优值为12.534 6.高速时的性能指标IAE的变化曲线经过5次迭代趋于稳定,并达到最小值,最小值为1.262;参数Np的最优值为20.923 8,参数Nc的最优值为10.693 5.
5.1.2 换道工况
进行换道工况参数优化分析,结果如图8所示.图8a~图8f 分别为换道工况下车速为低速、中速、高速时的性能指标IAE与参数值Np,Nc的变化曲线.
5.2 仿真验证
为了比较控制器的控制效果,选择双移线工况与换道工况在不同速度下进行对比分析.图9~图14分别为车辆以低速、中速、较高车速行驶时,三种控制器的轨迹跟踪效果.针对不同的工况和不同的车速,将模糊控制器、模型预测控制器以及基于PSO优化模型预测控制器的实际行驶路径进行对比.
从图9~图14可以看出,在v=10 m/s时这三种控制器都能对期望路径进行比较好地跟踪,且跟踪精度较高.相较于其他两种控制器,模糊控制器的跟踪误差稍大,其最大横向偏差出现在弯道处;当采用模型预测控制器时,横向偏差有所减小,路径跟踪效果有所提高;而基于PSO优化的模型预测控制器的跟踪误差进一步缩小,路径跟踪效果进一步提高.
6 结 论
1) 设计了模糊控制器与线性时变模型预测控制器.
2) 采用PSO算法对模型预测控制器中的预测时域与控制时域进行优化,得到了不同速度和不同工况下的最优控制参数.将模糊控制器、模型预测控制器以及基于PSO优化的模型预测控制器的控制效果进行对比.结果表明,中低车速时这三种控制器都具有较好的路径跟踪效果;车速较高时,相较于模糊控制器,模型预测控制器的跟踪误差更小、跟踪效果更好,而基于PSO优化的模型预测控制器的路径跟踪效果进一步提高.
