野外无人车越台能力分析
2020-09-15朱庆宇李庆杰康亚彪高世卿李彦生ZhuQingyuLiQingjieKangYabiaoGaoShiqingLiYansheng
朱庆宇,李庆杰,康亚彪,高世卿,李彦生 Zhu Qingyu,Li Qingjie,Kang Yabiao,Gao Shiqing,Li Yansheng
野外无人车越台能力分析
朱庆宇,李庆杰,康亚彪,高世卿,李彦生
Zhu Qingyu,Li Qingjie,Kang Yabiao,Gao Shiqing,Li Yansheng
(沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110169)
针对4×4野外无人车进行越台能力分析,通过建立力学模型,分析轮式野外无人车结构参数和几何参数对越台能力的影响,建立越台能力与车辆结构的关系,寻找影响越台能力的各结构的变化规律,可视化处理各个参数与越台能力之间的关系。通过计算机仿真分析与计算结果对比,得出质心到前轴的向距离与轴距的比值增大,则前轮越台能力增大,后轮越台能力减小;轴距与轮胎直径的比值增大,则前轮越台能力减小,后轮越台能力增大。
越台能力;野外无人车;力学模型
0 引 言
受军事和航空航天需求影响,近年来轮式野外无人车辆日益受关注,其中通过性是野外行驶车辆的重要指标,要求野外无人车在各种典型的无人地区(陡坡、侧坡、凸岭、路沟、壕沟、弹坑、灌木丛、河流、土坎、田埂及台阶等)能顺利通过[1],国内对不同悬架、不同车轴数量的越野车辆在不同类型路面的通过性进行了建模分析,找出主要影响因素[2],随着计算机技术的进步,通过SolidWorks和MATLAB对多轴车的越障性能进行建模仿真分析[3]。野外无人车越过垂直障碍的能力最能体现其越障能力的好坏,鉴于此,选取垂直障碍(台阶)作为研究对象,采用障碍物高度与轮胎直径的比值说明四轮驱动无人越野车的越障能力[4]。可以通过台阶高度与车辆几何参数,分析出几何参数对越台能力的影响;由于越台时车速很低,故可以用静力学平衡方程来求得台阶高度与汽车结构参数的关系。
1 正面越台能力分析
1.1 几何参数对越障能力的影响
1.1.1 台阶高度与前悬高度关系
如图1所示,a为前悬高度,w为台阶高度,m为最小离地间隙,通过几何关系可知,当a≥w时,才能保证车头安全通过台阶。
图1 台阶高度与前悬高度关系(前轮跨越台阶前)
1.1.2 台阶高度与最小离地间隙关系
如图2所示,w、m同上,为前后轮轴心的连线与水平地面的夹角,通过几何关系可知,当m≥w时,才能保证车底部安全通过台阶。
1.1.3 台阶高度与离去角关系
如图3所示,w、m、同上,2为离去角,为轴距。通过几何关系可知,当2≥时才能保证车尾安全通过台阶。
则

由以上分析可知,轮式野外无人车随着a、m和2的增加,越台能力增加。
1.2 结构参数对越障能力的影响
1.2.1 前轮跨越障碍分析
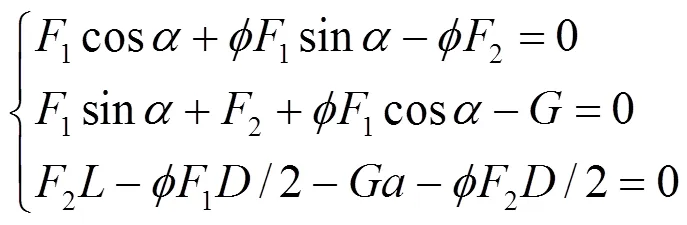
如图4所示,1为地面作用前轮的支持力,2为地面作用后轮的支持力,为前轮轴心和障碍物接触点连线与水平面的夹角,为作用在质心的整车重力,为轮胎直径,为质心到前轴的水平距离,为质心到后轴的水平距离,0为质心到前后轴心连线的距离,为地面附着系数,1为前轮驱动力,2为后轮驱动力,w、同上。
图4 前轮越台时受力分析图
根据越台能力几何关系可知
根据前轮越台时刻受力分析得出式(5),前轮越台能力用单位车轮直径可克服台阶高度(w/)1表示。
1.2.2 后轮跨越障碍分析
如图5所示,1为地面作用前轮的支持力,2为地面作用后轮的支持力,为后轮轴心和障碍物接触点连线与水平面的夹角,、、、、0、、w、同上。
图5 后轮越台时受力分析图
根据越台能力几何关系可知
根据后轮越台时刻受力分析得出式(7),后轮越台能力用单位车轮直径可克服台阶高度(w/)2表示。
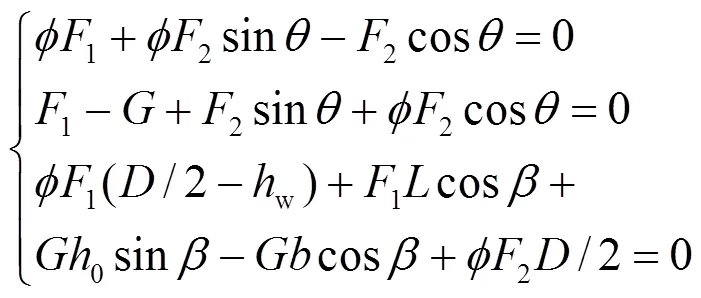
对于4×4野外无人车,前轮越台能力(w/)1随着的增加而降低,随着的增加而增加。后轮越台能力(w/)2与前轮情况相反,随着的增加而增加,随着的增加而降低。其中w为单位车轮直径可克服的台阶高度,用来表示汽车的越台能力,能更好地体现汽车结构参数对越台能力的影响,消除不同型号的轮胎对越台能力的影响。
1.3 实车验证
1.3.1 实车优化前结构参数
某四轮驱动无人越野车的优化前结构参数见表1。
1.3.2 前、后轮越台能力随附着系数变化
由图6可以看出,随着地面附着系数增加,越台能力增加,但前、后轮越台能力相差较大。
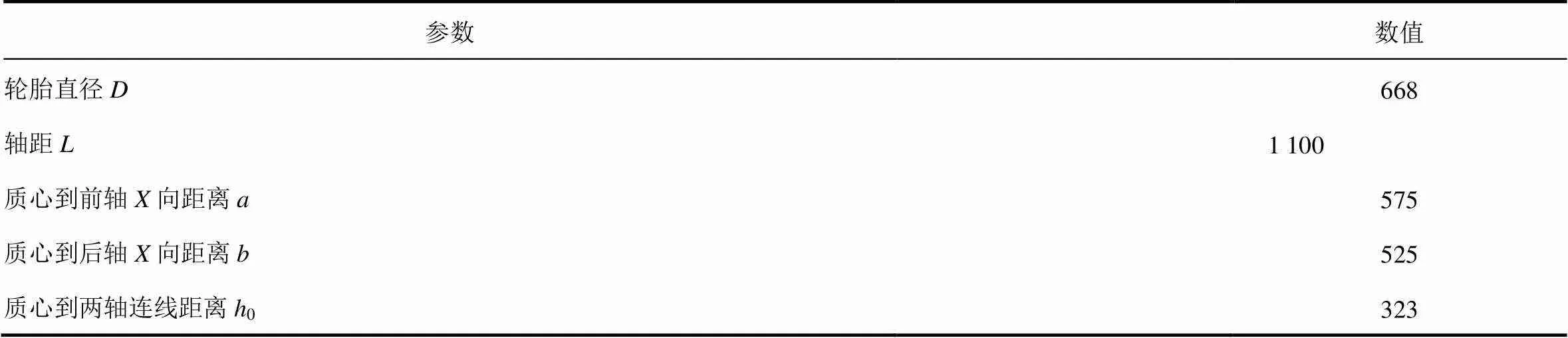
表1 四轮驱动无人越野车优化前结构参数 mm
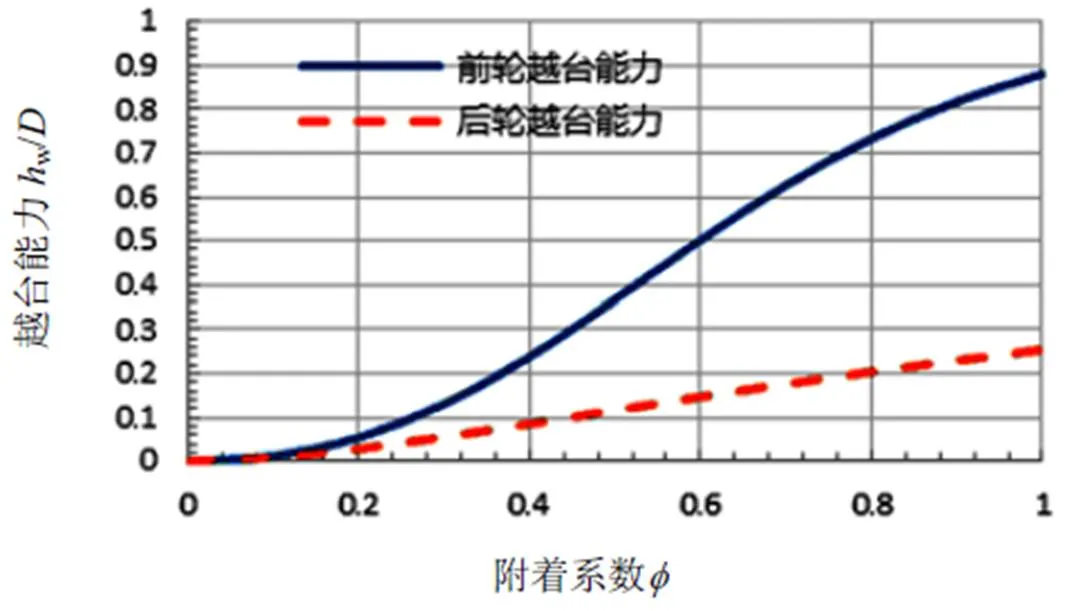
图6 前、后轮越台能力随附着系数的变化曲线
1.3.3 前、后轮越台能力随参数的变化
由图7可以看出,随着质心到前轴向距离与轴距的比值/的增加,前轮越台能力增加,后轮越台能力下降,在其他参数不变的情况下,当/=0.3时,达到整车最佳越台能力(由于野外无人车一般在干燥土路上行驶,故附着系数取0.65)。
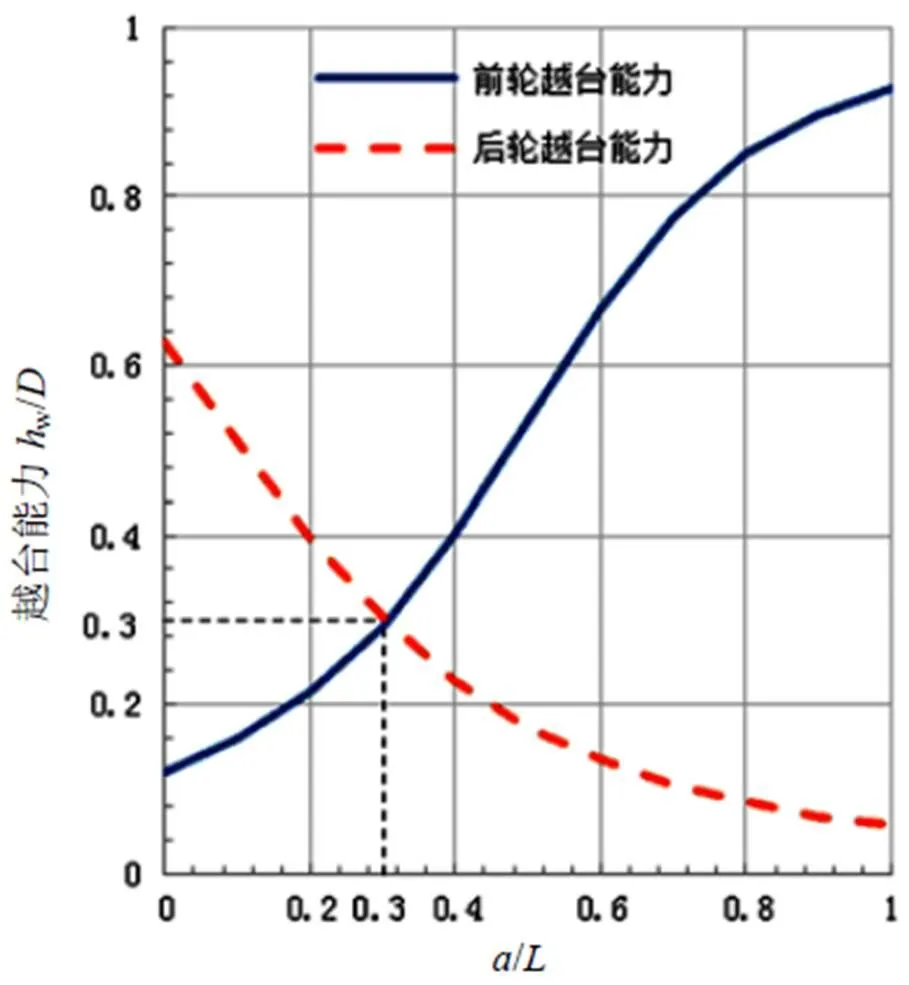
图7 前、后轮越台能力随a/L的变化曲线
1.3.4 前、后轮越台能力随参数的变化
由图8可以看出,随着轴距与轮胎直径的比值/的增加,前轮越台能力下降,后轮越台能力增加,在其他参数不变的情况下,当/=2.35时,达到整车最佳越台能力(由于野外无人车一般在干燥土路上行驶,故附着系数取0.65)。
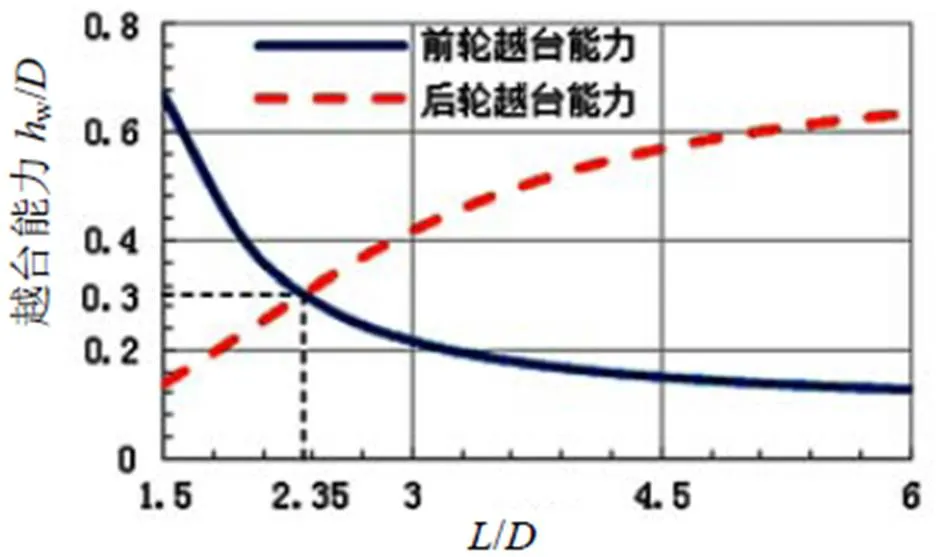
图8 前、后轮越台能力随L/D的变化曲线
1.3.5 优化整车结构参数
通过上述分析,调整整车结构参数、,使四轮驱动无人越野车达到最佳越台能力,优化后参数见表2。

表2 四轮驱动无人越野车结构参数优化 mm
由图9可以看出,前轮越障和后轮越障曲线在附着系数为0.65时交叉,该时刻四轮驱动无人越野车达到最佳越台能力,越台高度为200 mm。
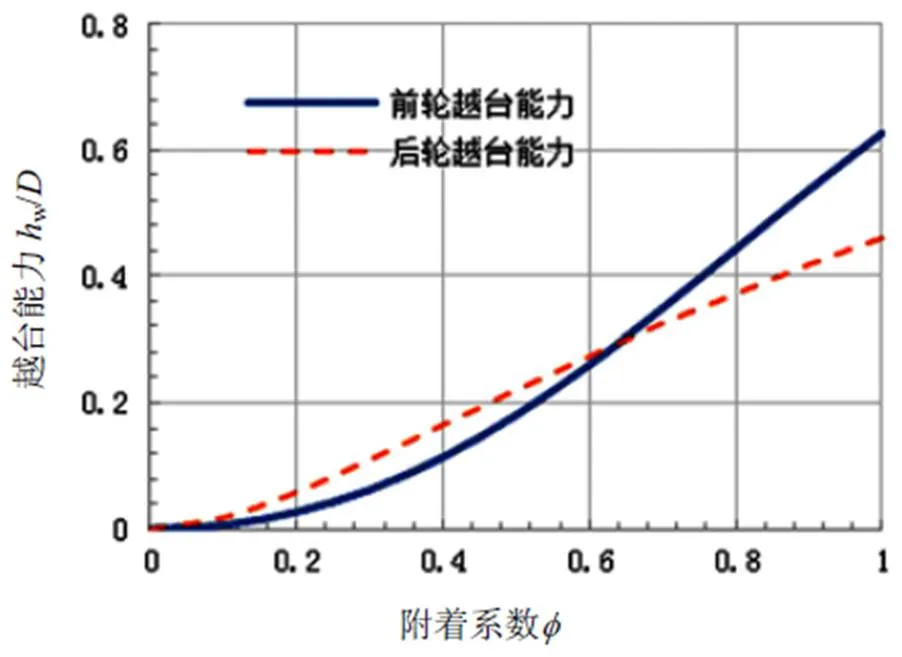
图9 优化后前、后轮越台能力随附着系数的变化曲线
2 实车对比试验
目前,我国对轮式野外无人车越台能力的评价处于理论分析阶段,没有规范的评价指标;因此采用对比试验的方法,将仿真结果、实车试验结果和理论计算结果进行对比,分析相同特征和存在差异的原因。
2.1 仿真分析
1)利用SolidWorks绘制出模型,通过更正质量分布,调整质心位置,使模型符合优化后的整车参数;
2)绘制地面,将整车放置于地面适当位置,使小车前进方向垂直于台阶,前轮与台阶间距离较小;
3)设置重力垂直于地面,轮胎低速滚动,轮胎与地面间附着系数初始值为0.1,并为轮胎设置较大的刚度;
4)进行仿真,如图10所示,观察小车前后轮是否能越过台阶,调整台阶高度,找到小车越障的极限高度并记录;
5)依次更改附着系数为0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9、1,重复第4步,记录数据与理论结果进行比较。
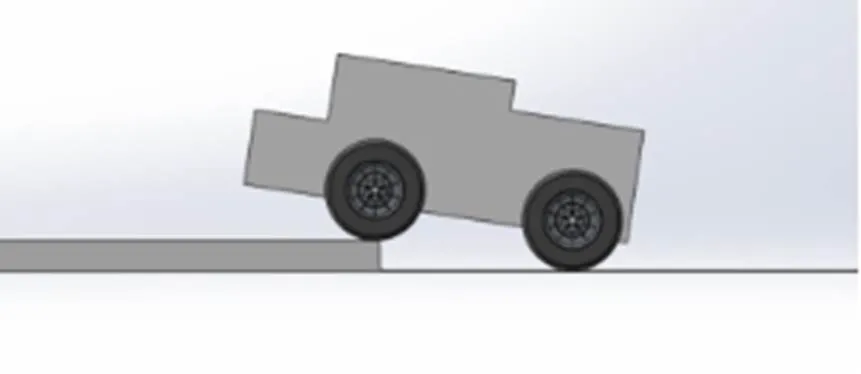
图10 仿真试验图
2.2 实车试验
1)将装配好的野外无人车行驶到测量质心的设备上,测量质心位置;
2)通过调整负载的位置来调整质心位置,直到接近理论位置为止;
3)小车在符合要求的路面上进行越台试验,如图11所示,记录在不同路面上的极限越台高度。

图11 实车跨越台阶图
2.3 结果记录
前、后轮越台能力的理论计算、计算机仿真和实车试验数据见表3。
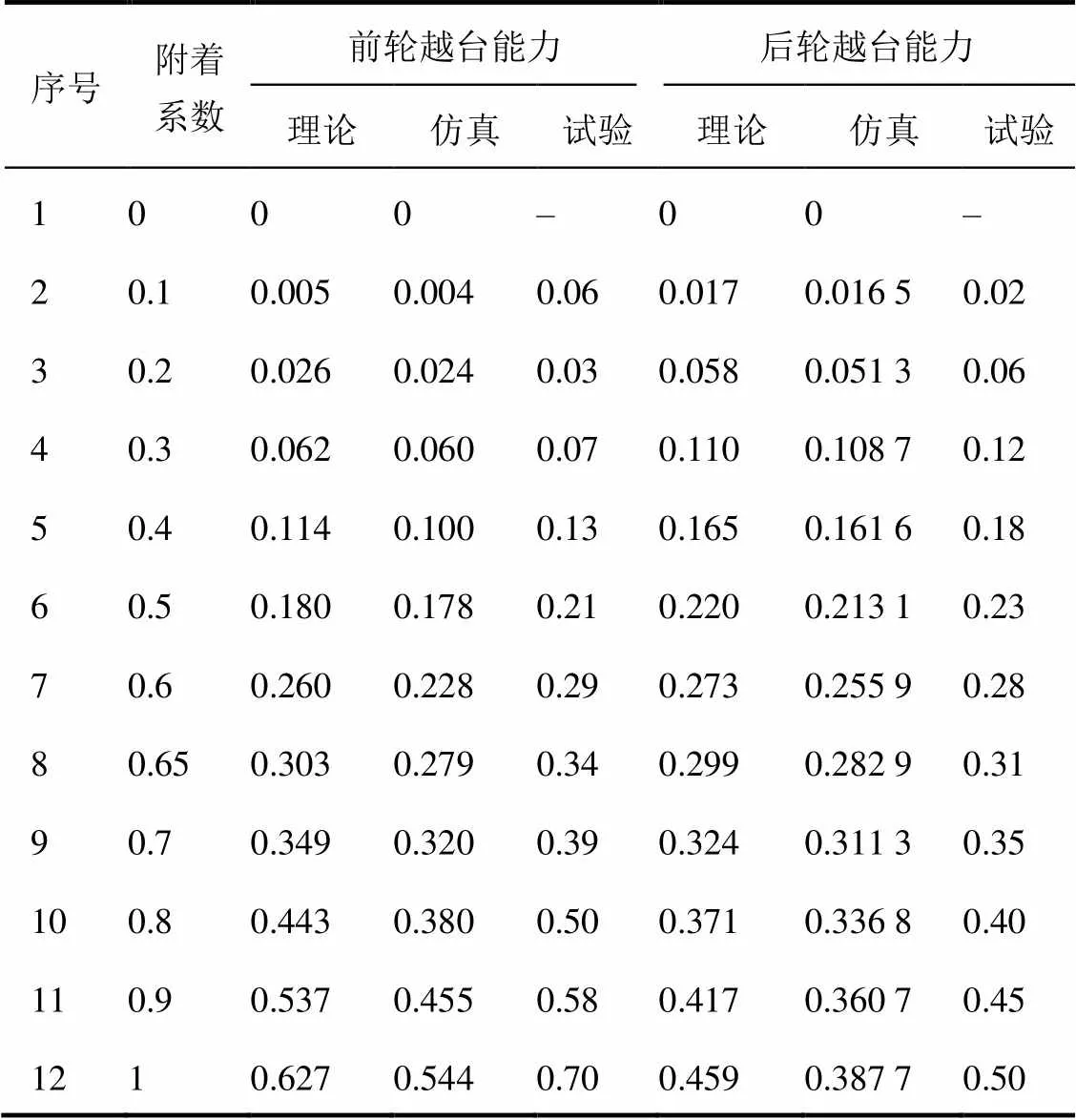
表3 样车越台能力比较表
根据上表可知,随着地面附着系数的增加,前轮越台能力(w/)1和后轮越台能力(w/)2都在逐渐增加,且(w/)1增加趋势快一些,当路面附着系数为0.65时(野外无人处正常行驶路面),前后轮越台能力近似相等,即(w/)1≈(w/)2≈0.3,这样可保证野外无人车在正常路面行驶时,充分发挥整车的越台能力。
3 结 论
通过对越台能力的分析,可得出地面附着系数、前悬高度a、最小离地间隙m、离去角2、/、/等参数会影响前、后轮的越障能力。
1)前轮和后轮的越台能力随着地面附着系数的增加而增强;
2)当/增大,则前轮越台能力增大,后轮越台能力减小;当/增大,则前轮越台能力减小,后轮越台能力增大;
3)通过理论、仿真和试验可以看出,随着附着系数增加,越台能力呈现增大的趋势;
4)由于仿真模型中设置的弹性系数、阻尼系数与理论环境有偏差,因此理论越台能力与仿真越台能力有差别,但结果接近;
5)由于实际越障过程中,样车有一定的初速度,加之轮胎变形、悬架的减振作用等,导致其实际越台能力大于理论值。
[1]余志生. 汽车理论[M].北京:机械工业出版社,2009.
[2]郭占军,张为公,庞罕. 越野车辆经典地形通过性建模与仿真[J]. 汽车设计,2008(11):31-33.
[3]屠德新,魏道高,蒋艮生,等. 基于ADAMS的车辆极限越障性能研究[J]. 湖北汽车工业学院学报,2010,24(2):27-29.
[4]兰凤崇,陈吉清,王望予. 汽车垂直越障能力的计算及实验[J].汽车工程,1997,19(2):116-120.
2020-04-07
U462.2
A
10.14175/j.issn.1002-4581.2020.04.012
1002-4581(2020)04-0046-05
