FPSO软刚臂单点系泊模型实验平台设计
2020-09-14樊哲良孙珊珊王延林张向锋徐留洋
樊哲良, 孙珊珊, 王延林, 张向锋, 徐留洋
(大连理工大学a. 海洋科学与技术学院;b. 基础教学部,辽宁盘锦124221)
0 引 言
单点系泊系统主要用来系泊海洋固定装置的大型船形浮体,经常用于油气开发的浮式生产储油装置或卸油装置(Floating Production Storage and Offloading,FPSO),近年来也被应用在海上的核能发电、温差发电、风能发电等船形浮体。单点系泊系统连接船形浮体和海底管汇,在风标效应的作用下,不仅需设计合理的刚度,限制浮体的运动,同时在旋转过程中需要保证管道、单点传输系统等不受破坏。渤海多个FPSO 均采用了软刚臂单点系泊的概念。渤海多年的软刚臂原型测量中发现[1],在复杂的海洋作用下浮体会引起软刚臂结构的横摆共振问题,即便在温和海况下软刚臂的横摆响应仍十分显著。同时,软刚臂空间姿态以及产生的动荷载会对结构的损伤产生难以量化的影响。单点系泊系统一般较大,如果在实验室对真实的单点系泊系统进行全部还原受到场地的限制,只能将单点系泊系统进行缩比。传统的模型实验方法主要是水池实验,目的是验证单点系泊系统的设计是否合理[2-4]。然而,由于水池的限制模型比例都较小,选择较小的比尺使得结构模型难以加工,严重影响了模型实验结果的准确性。此外,水池实验更多的是分析系泊浮体的运动性能,忽略了对单点系泊系统结构问题的研究。通常海洋结构比较庞大,可采用动力子结构实验的方法对单点系泊系统有针对性的研究。
动力子结构实验技术是Nakashima 等[5]基于拟动力结构模型实验的新型结构实验技术,其优点可以将结构的关键部件或者装备独立出来作为实验目标,而结构的其余部分通过振动台或数值模拟,这使得研究人员可以尽可能地利用实验室设备和空间条件,对复杂结构的非线性动力响应开展模型实验。动力子结构实验广泛应用于结构抗震研究当中[6-7],近些年来在海洋工程领域也得到了发展[8-9]。基于以上理论,本文将船形浮体由6 自由度运动台代替,基于量纲分析理论,在适当的简化模型基础上,考虑软刚臂存在问题,尝试建立软刚臂系泊系统动力子结构实验平台。
1 实验平台满足的相似准则
软刚臂单点系泊方式适用于水深在40 m 以内的浅水海域,主要由船形浮体、软刚臂、单点平台三部分组成,如图1 所示。其中,软刚臂是一个空间多刚体结构,内部共有13 个铰接点,软刚臂一端X1铰接船形浮体的系泊支架;另一端X3铰接单点平台的主轴承X4,同时系泊腿X2铰接系泊臂,能够解除浮体由于波浪的波频而产生的约束。本实验平台以渤海明珠号FPSO软刚臂单点系泊系统为例,采用1∶10 的大比尺模型结构,理论上满足模型的几何相似、运动相似和动力相似。由于本次试验只针对软刚臂存在的科学问题进行研究,因此该实验平台为部分相似。
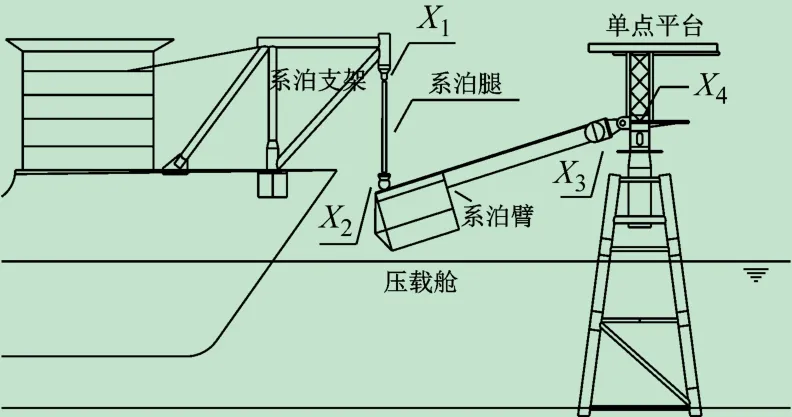
图1 FPSO软刚臂单点系泊系统
1.1 软刚臂
(1)软刚臂模型整体设计。软刚臂模型是整个实验平台设计的核心,因此,软刚臂模型设计十分关键。除要保证构件的尺寸相似外,同时应保证重力的相似。设计的难点在于,如果使尺寸和重力全部相似,软刚臂杆件壁厚过薄,有可能造成试验过程中弯曲强度不够。因此,系泊臂、系泊腿、压载舱等可由铝代替。此外,软刚臂铰接船形浮体,本质上属于一维的弹簧-质量系统,还应满足刚度的相似。理论上,刚度相似比较复杂,假定系统是静态的,根据力和力矩平衡的原理,软刚臂系泊系统无论在纵向还是在垂向运动时,都满足力平衡和力矩平衡。当发生纵向和横向位移时,软刚臂系泊结构上的受力如图2 所示。图中:φ1为系泊臂与水平方向倾角;φ2为系泊腿与竖直方向夹角;L1、L2分别为系泊臂、压载液质心与O′间的线距离;L3为系泊腿质心与上铰接点之间线距离;L4、L5分别为系泊臂、系泊腿计算长度。根据樊哲良等[10]给出的关系式,软刚臂水平系泊力为
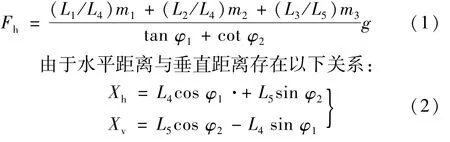
保持垂直高度Xv为一定工况的高度,φ2假定为零时,水平距离也为零,编制MATLAB 程序,可得到软刚臂水平系泊力与距离之间的关系。其中,水平系泊力Fh和水平距离Xh的比值即为软刚臂的刚度

因此,要想保证刚度的相似,除了需要保证尺寸相似与重力相似外,各个主要构件,如系泊臂、系泊腿、压载舱等的重心位置也必须相似。
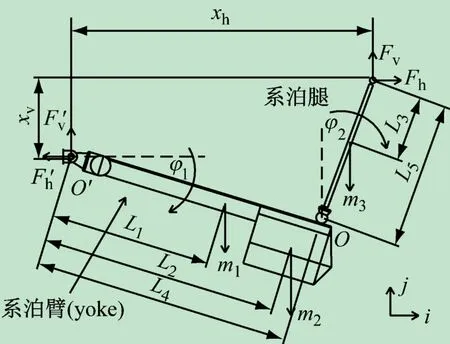
图2 软刚臂系泊结构
(2)TLD 减振设计。为减少软刚臂横摆共振幅度,保证软刚臂模型的尺寸相似、重力相似以及重心位置相似的基础上,在2 个压载舱模型之间设计了一套TLD减振装置。由于软刚臂只有横摆方向需要进行减振,其方向比较单一,选取矩形容器对软刚臂的横摆进行抑制。TLD模型的尺寸设计应包括:①TLD模型装置长度L。为了避免在加上TLD后改变软刚臂在纵荡方向上的刚度,可在2 个压载舱重心处中间加装TLD装置。参考模型2 个压载舱内侧舱壁的距离以及表1的缩尺比,实际的TLD长度L 设计为1. 64 m;②TLD模型容器高度h。利用6 自由度运动台对软刚臂在无TLD的状态下的横摆方向进行加载,得到软刚臂模型横摆固有频率为0. 32 Hz。根据反共振调谐原理,TLD的频率应与软刚臂横摆固有频率保持一致,分别按照TLD的深水理论和浅水理论方法[11-12]计算液体高度。从结果能够看出,当TLD 固有频率0. 32 Hz、长度为1. 64 m时,利用深水理论和浅水理论所计算出的液体高度差别不大,均为0. 11 ~0. 12 m,最终TLD 模型容器的设计高度h为0. 3 m。③TLD容器宽度b。设计容器的宽度应当适中,若设计太小能降低TLD的动力吸振效果,太大则压载舱不足以全部提供TLD 的液体。实际TLD模型容器的设计宽度b为0. 25 m。
在软刚臂模型设计过程中,2 个压载舱与中间的TLD容器均可以拆卸,以满足不同的试验需求。加装TLD容器方法如图3 所示。
图3 软刚臂加装TLD示意图
(3)系泊腿上铰点轴承设计。系泊腿上端铰接点X1具有3 个自由度,如图4(a)所示,通过铰接点R1x与R1y实现了前后、左右两个方向的旋转;通过内置的推力滚子轴承(见图4(b)),既实现了上铰点与系泊腿之间力的传递,同时保证了系泊腿沿竖直方向R1z的旋转。一旦推力滚子轴承发生故障,可能会造成功能域、强度、疲劳等失效问题,甚至不能发生相对的艏摇,造成疲劳断裂破坏被迫停产的风险[13]。因此,推力滚子轴承对于软刚臂正常工作具有重要作用。
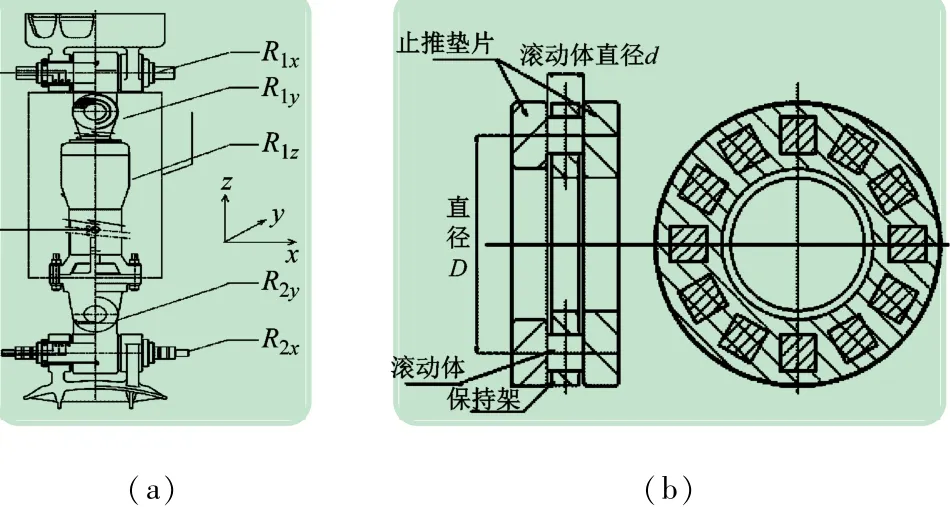
图4 系泊腿结构(a)与推力滚子轴承(b)
理论上推力滚子轴承应严格遵守相似准则,考虑到常规的轴承无法保证缩比模型的缩尺尺寸,本实验平台采用与缩尺尺寸相近的NSK89307 的推力滚子轴承,保证了轴承的运动相似。主要结构参数如下:内圈直径35. 0 mm,外圈直径68. 0 mm,节圆直径51. 5 mm,滚动体半径8 mm,滚动体数量12,接触角β =90°。
1.2 单点平台
在软刚臂系泊定位中,单点平台起到了锚泊点的作用,是保证在季风气候下船形浮体具有风标效应,时刻保持环境荷载最小的关键装置。由于单点平台模型不是此次设计的重点,因此仅需保证悬挂点X3的相对X1在高度上的相似,同时保证主轴承X4直径尺寸上的相似,而不用考虑运动相似与动力相似。
1.3 系泊支架
系泊支架焊接于6 自由度平台上方,主要用来保证软刚臂的垂直高度,实验模型设计时可考虑其外形相似,并保持系泊支架的绝对刚度,简化具体结构形式。
1.4 船形浮体
在软刚臂单点系泊系统的研究中,船形浮体是软刚臂的载体。由于原型船形浮体往往在210 m 以上,即使比尺很大,也很难在实验室内模拟,在实验系统设计时,浮体假设为刚体,6 自由度平台代替浮体,将浮体运动带动软刚臂,而不必考虑船形浮体模型具体形式,有利于简化软刚臂单点系泊实验模型设计,且不影响对软刚臂问题的研究。
由以上缩尺关系可推导缩比模型各量纲单位的缩比因数[14],其中:λ 为尺寸缩尺比;L 为线性长度;M为质量;T表示时间,如表1 所示。

表1 软刚臂单点系泊系统缩比模型试验缩尺因数
2 实验方案设计
FPSO软刚臂单点系泊系统中,主要包括浮体纵荡刚度、软刚臂横摆、系泊腿推力滚子轴承故障等,这些是判断软刚臂在位运行安全性能的重要依据。试验内容主要是船形浮体在横摇与艏摇运动下,软刚臂存在的科学问题。其中,横摇主要引起软刚臂的横摆共振。将原型压载舱内部的压载液由水代替,压载水分配到TLD装置当中,以保证软刚臂总体质量相同。为了研究在不同液体深度下TLD 对软刚臂的减振效果,分别按照TLD的液体深度0. 06、0. 09、0. 12 m进行软刚臂横荡减振试验。试验中,利用6 个自由度平台模拟FPSO的横摇,以1°、2°和3°进行加载。此外,采用扫频的方式,从0. 2 Hz开始,以0. 02 Hz的递增直至0. 4 Hz结束。
艏摇主要引起软刚臂推力滚子轴承的损伤问题。由于软刚臂的铰接点出现故障是一个长期过程,可首先利用完好的铰接点进行试验,再将有故障的铰接点替换进行相同试验。通过加速度采集数据分析,进而建立故障诊断的评价方法。试验中,6 自由度平台输入船形浮体的艏摇激励,进而带动系泊腿沿R1Z方向旋转。考虑到实际的FPSO船体艏摇运动的幅度与频率不会特别大,试验的艏摇幅度控制在± 7°内,艏摇频率控制在0. 35 Hz内。
试验开始之前,6 轴惯导倾角仪分别安装在系泊腿上部系泊支架与系泊腿处,通过作差得到推力滚子轴承Rz的转角。双轴倾角仪分别安装在系泊臂与系泊腿处,进而测量软刚臂横摆运动的幅值。4 个振动加速度传感器布置在左右系泊腿轴承处,分别采集轴向及径向的振动加速度信号。传感器刚性地固定在轴承所在位置的系泊腿外壁上,以确保推力滚子轴承的振动信号经过轴套和系泊腿外壁被传感器采集到。同时,为更好地观察推力滚子轴承的相对转动和软刚臂的横向摆动,在左右系泊腿的轴承位置以及远处各安装一个网络视频监控摄像仪。在此基础上,所有的传感器汇总至动态信号采集分析系统与网络视频监控系统。软刚臂单点系泊系统试验系统如图5 所示。
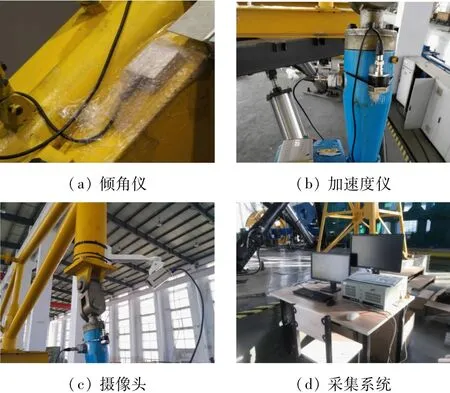
图5 软刚臂单点系泊系统试验系统
3 实验平台评价
3.1 TLD减振策略验证
试验过程中,由于需保证软刚臂模型总体质量不变,故将压载舱中的水部分灌入到TLD 容器中,造成两端压载舱的空气占据一定的空间,因此,压载舱也是一种类型的TLD[15]。从表2 可以看出,在软刚臂模型固有频率0. 32 Hz时,3 种TLD 液体深度下减振幅值大都达到了70%以上,其中在最为接近TLD模型设定深度的9 cm和12 cm减振最为明显,验证了实验平台模型加装TLD 对软刚臂横摆减振的可行性。后期将在TLD内部设置隔板,并在压载舱内安装挡板抑制压载舱的晃动,优化TLD的效果。
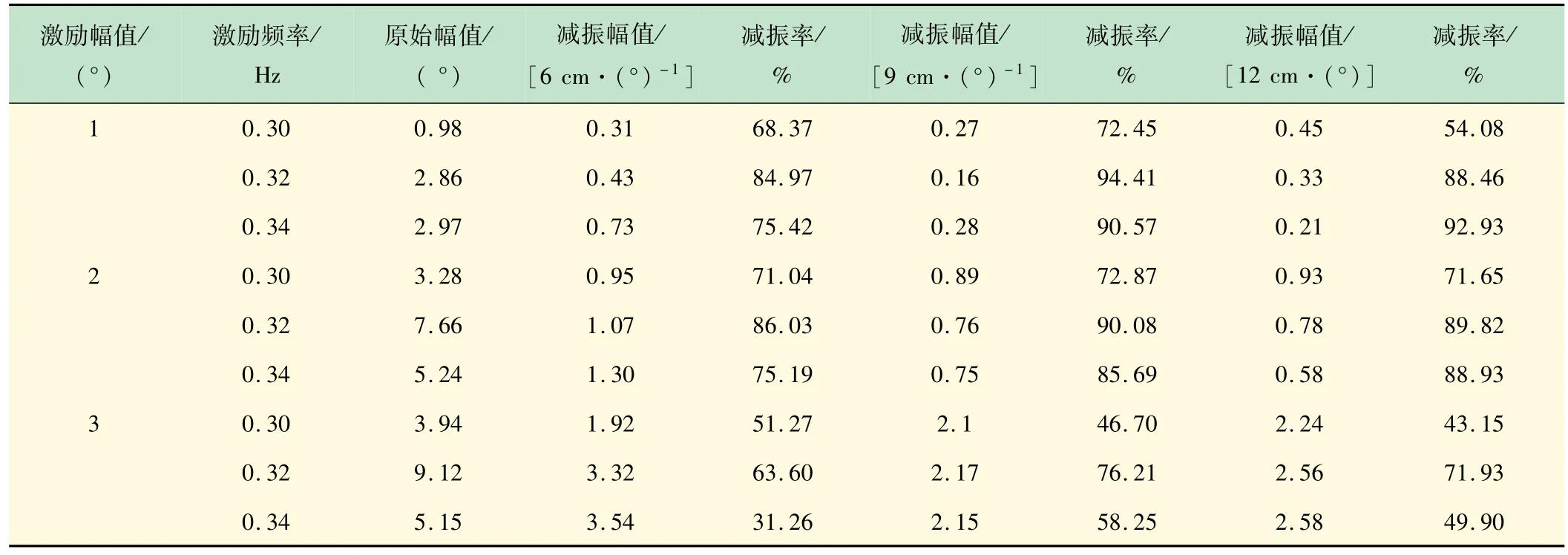
表2 不同水深下TLD减振效果对比
3.2 推力滚子轴承试验验证
为了获取推力滚子故障轴承的结构缺陷,采用了电火花的加工技术。图6(a)所示为经电火花加工的FPSO系泊腿推力滚子轴承外圈滚道,缺陷深度为0. 2 mm,宽度为0. 3 mm。考虑到系泊腿外壁较厚,轴承产生的振动信号经过较长的传递路径后,会有一定程度的衰减,试验加工缺陷宽度较大。图6(b)所示为经电火花加工过的FPSO 系泊腿推力滚子轴承滚动体,滚动体缺陷深度为0. 1 mm。通过采集正常轴承与故障轴承的振动信号,进行最小熵解卷积滤波降噪处理[16],比较正常轴承与故障轴承在艏摇过程中加速度值的变化,如图7、8 所示,可获得判断FPSO系泊腿轴承运转状态依据,从而验证试验平台的正确性。
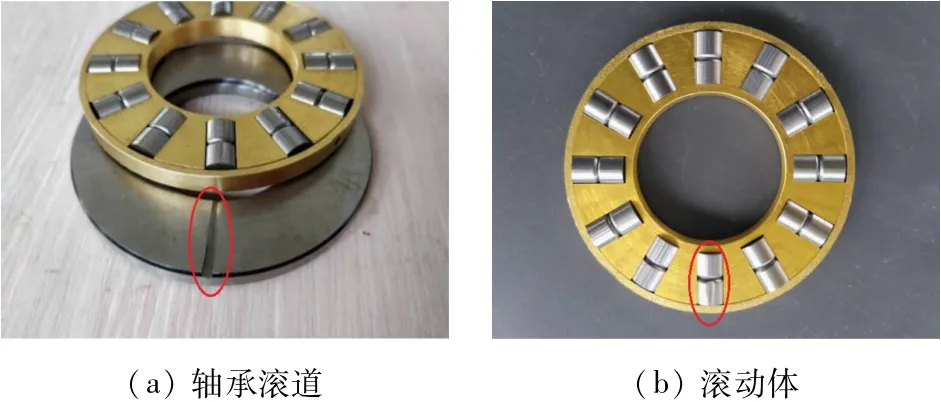
图6 推力滚子缺陷故障的结构
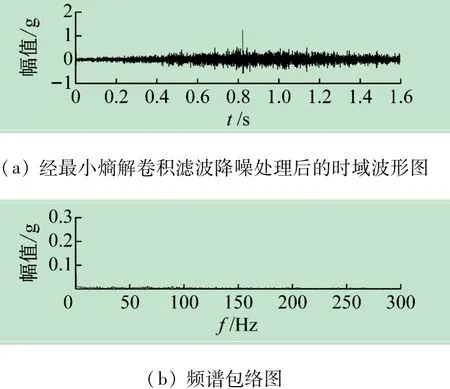
图7 正常轴承的时域波形图与频谱包络图
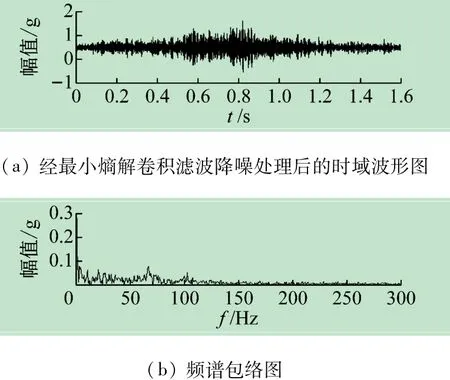
图8 轴承滚道故障的时域波形图与频谱包络图
4 结 语
以渤海明珠号FPSO 软刚臂单点系泊系统为原型,设计与制造采取了部分相似的缩尺策略。其中,单点平台与系泊支架在保证绝对刚度的前提下仅为几何相似,软刚臂模型除满足几何相似外,还满足重力相似与刚度相似,船形浮体由6 自由度运动台代替,保障了在大比尺(1∶10)情况下试验的有效性与可靠性。软刚臂模型具备TLD减振装置,并缩比了推力滚子轴承的结构,可用于横摆减振策略与推力滚子轴承故障分析的研究。目前,针对这两项研究已经有一定的进展,未来,将以该试验平台为基础,针对轴承的损伤评价、刚度的设计以及软刚臂运动下对单点平台的影响等,在模型改进中分析讨论。
